Magnetorheological MR Brake System Dr Khisbullah Hudha Problems
 Brake System Dr. Khisbullah Hudha")
Magnetorheological (MR) Brake System Dr. Khisbullah Hudha

Problems with Conventional Hydraulic Brake System • • High energy consumptions Bulky Problems with leakage in hydraulic line Brake noise due to metal-with-metal friction Brake pad need to be replaced periodically Response delay due to pressure build up Require auxiliary components such as: hydraulic pump, fluid transfer, brake valve & fluid researvoir)

2 Types of Hydraulic Brake System
 • Simple design &")
Why Magnetorheological Brake • Low power requirement (only several ampere) • Simple design & construction • Hydraulic free: no hydraulic line & need less space requirement • No metal-with-metal friction • No brake pad needed • Easy to control (potential to be used for brake-bywire (BBW) system) • Fast response (0. 02 second)

Components of MR Fluid • Iron Particle: micron or nano size • Carrier fluids: synthetic oil, silicone or water • Binder Material (to prevent the iron particles from settling down): special grease

Behavior of MR Fluid

MR Fluid • MR fluids are created by adding micron-sized iron particles to an appropriate carrier fluid such as oil, water or silicon. • Their rheological behavior is almost the same as that of the carrier when no external magnetic field is present. • When exposed to a magnetic field, the iron particles acquire a dipole moment aligned with the applied magnetic field to form linear chains parallel to the field

Basic design of MR Brake

Prototype of MR Brake developed in Autotronics Lab - UTe. M


MR Brake Test Rig available in Autotronics Lab - UTe. M

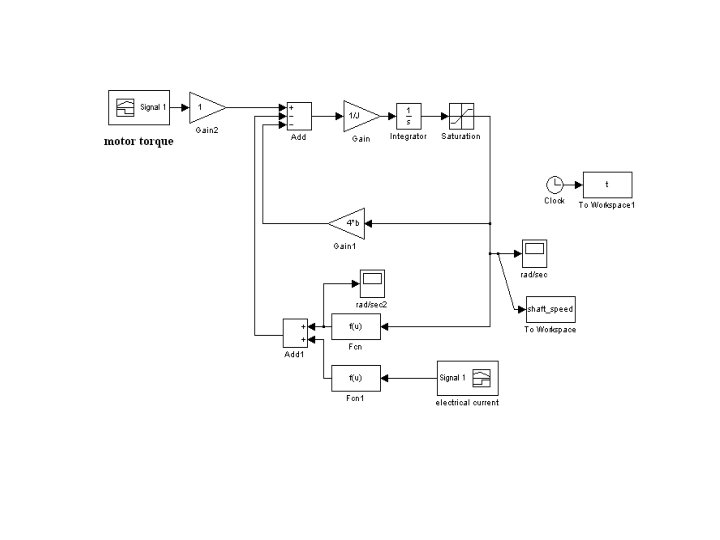
System Modeling
 - Torque of")
Equations of Motion • Case 1: Belt tensioner on (Speed Control) - Torque of the motor will be transferred to the driven shaft via belt-pulley system Where Tm = torque of the motor Ts = torque of the shaft h = efficiency of belt-pulley system (96% - 98%)

Where b = viscous damping of the bearing Tmr = brake torque J = load moment of inertia
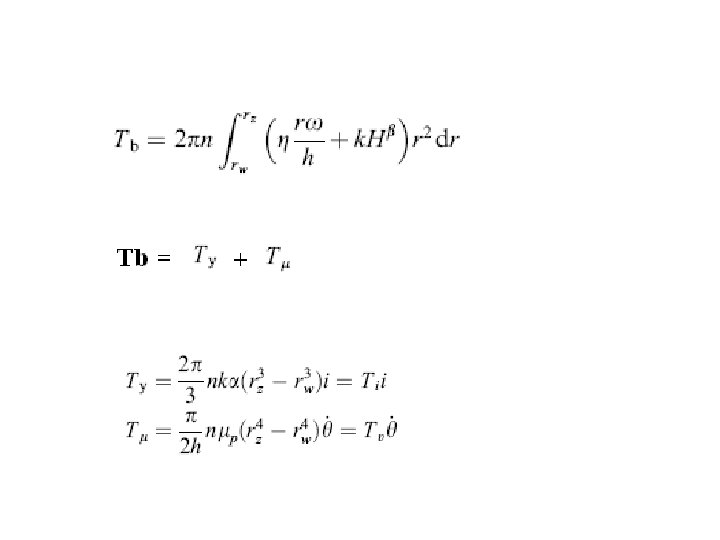
 • MR Fluid behavior • MR Brake Torque Calculation:")
Torque of MR Brake (Tmr) • MR Fluid behavior • MR Brake Torque Calculation:

Speed control
 Belt off Ts")
Case 2: Belt Tensioner off (torque control or stopping time control) Belt off Ts = 0

Equations of Motion Omega dot negatif: deceleration
")
Motor Torque (belt tensioner off at t= 4 sec)
")
Current applied starting from t=4 sec)

Stopping time
- Slides: 25