LPVLinear Parameter Varying LPVLinear Parameter Varying LPVLinear Parameter

")
")
")
 - the implementation of MPC requires the online solution of a")
 EGR: exhaust gas recirculation valves VGT: variable geometry turbochargers MAF: mass")



. ﺑﻠکﻪ کﻨﺘﺮﻟﺮ ﺭﺍ پﺎﺭﺍﻣﺘﺮی ﻣی ﻧﻤﺎیﺪ. ﺍیﻦ ﺭﻭﺵ ﺩیﻨﺎﻣیک ﺳیﺴﺘﻢ")
 The real time platform used is a 480 MHz Autobox-d.")

- Slides: 19
LPV(Linear Parameter Varying)
LPV(Linear Parameter Varying)
LPV(Linear Parameter Varying)
PWA(Piece wise affine) - the implementation of MPC requires the online solution of a QP at each time step. - Multi parametric quadratic program (mp-QP) H, F, G, W, E can be easily obtained from the plant model.
PWA(Piece wise affine) EGR: exhaust gas recirculation valves VGT: variable geometry turbochargers MAF: mass air flow MAP: intake manifold absolute pressure
Active Set Constraints are active in x 0 Numerical and iterative for solve QP problem , offline or Online. for each region, constraints are different and so we have different steps.
Active Set
Active Set
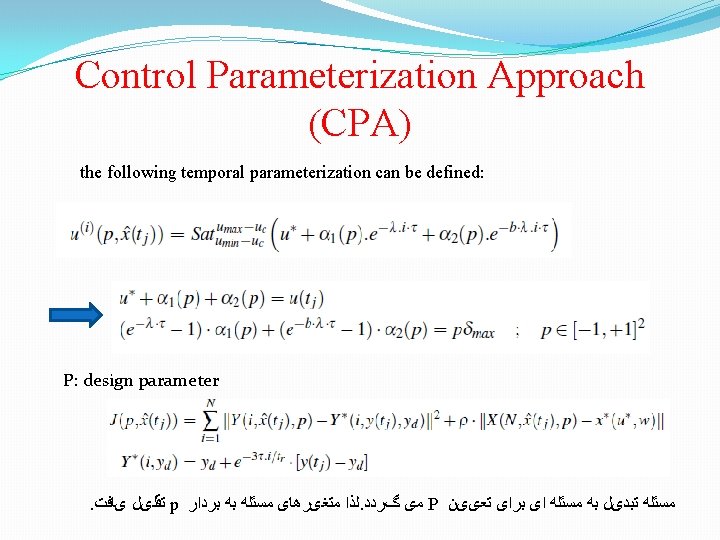
Control Parameterization Approach (CPA). ﺑﻠکﻪ کﻨﺘﺮﻟﺮ ﺭﺍ پﺎﺭﺍﻣﺘﺮی ﻣی ﻧﻤﺎیﺪ. ﺍیﻦ ﺭﻭﺵ ﺩیﻨﺎﻣیک ﺳیﺴﺘﻢ ﺭﺍ ﺗﻐییﺮ ﻧﻤی ﺩﻫﺪ the CPA consists basically in the computation of the steady state control u and the definition of a temporal parameterization that structurally meets the constraints. The steady state control u and the corresponding stationary state x can be calculated by solving a simple optimization problem.
Control Parameterization Approach (CPA) The real time platform used is a 480 MHz Autobox-d. SPACE system. The routines were developed in C language using the Matlab environment. Sampling period is 50 ms.