Locomotion Dinosaur Locomotion z We would like to








 ½")












 of dinosaurs z. Theropods y. Tyrannosaurus rex y. Allosaurus")










 we get:")










")

- Slides: 65
Locomotion
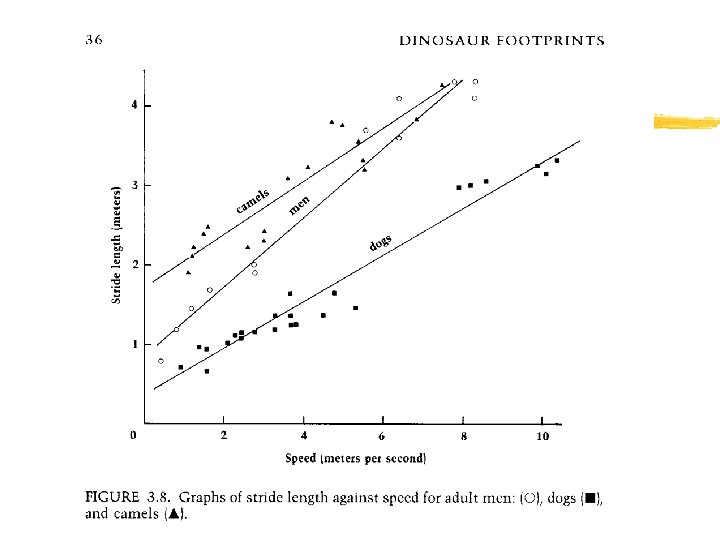
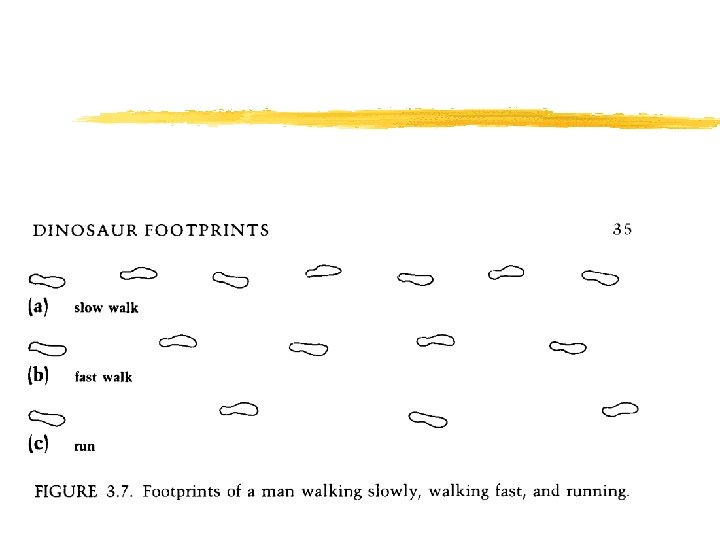
Dinosaur Locomotion z. We would like to estimate how fast dinosaurs could move. z. Solving the problem is straightforward if we assume that dinosaurs are like other terrestrial animals with erect gaits. z. First, we observe there is a relationship between how fast you walk or run and how long your stride is.
Dinosaur Locomotion z. Increasing your speed results in increased stride length. z. We can estimate the relationship via regression for any animal. Of course, all dinosaurs are dead, so we will have to do it indirectly.
Dinosaur Locomotion z. Begin by estimating the relative stride length of a dinosaur. z. Sr = Stride Length / Leg Length
Dinosaur Locomotion z. We expect animals of different sizes to have equal relative stride lengths when running at equivalent speeds. z. That is, if we compare a human adult with a human child, their relative stride lengths should be the same when they are running at equivalent speeds. However, 5 mph for an adult is not the same as 5 mph for a child.
Dinosaur Locomotion z. What is the equivalent speed? We call it the dimensionless speed. This comes from shipbuilding, since it is not practical to make full size models to test various hull designs. z. Sd = S / (Hull Length · g) ½
Dinosaur Locomotion z. In this equation, Sd is dimensionless speed, S is speed, Hull length is self explanatory, and g is gravitational acceleration (9. 81 m/s/s). z. Imagine we wish to build a ship with a hull length of 300 m, and we expect to operate the ship at 15 m/s. We build a model which is 5 m long.
Dinosaur Locomotion z. At what speed should the model be tested to give results equivalent to those of the actual ship? z 15 / (300 · 10)½ = 0. 27 z. The dimensionless speed is 0. 27.
Dinosaur Locomotion z. For our model, we have zx / (5 · 10) ½ = 0. 27 zand solving for x yields an equivalent speed of 1. 9 m/s.
Dinosaur Locomotion z. This is called dynamic similarity, and is used by the motion picture industry when they explode model buildings or cars. The same general approach applies to animals. In our case, we use: z. Sd = S / (Leg Length · g) ½
Dinosaur Locomotion z. Now, we assume that animals move in the most efficient or most economical way possible, and thus we expect dynamic similarity. z. Therefore, we expect them to use equal relative stride lengths.
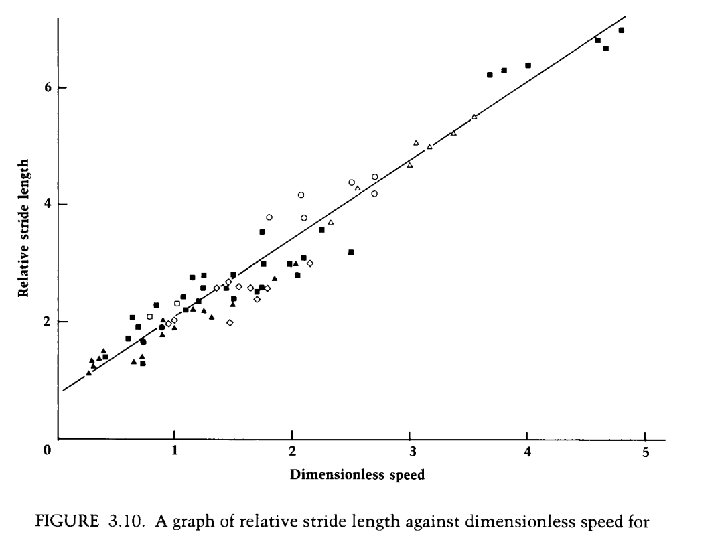
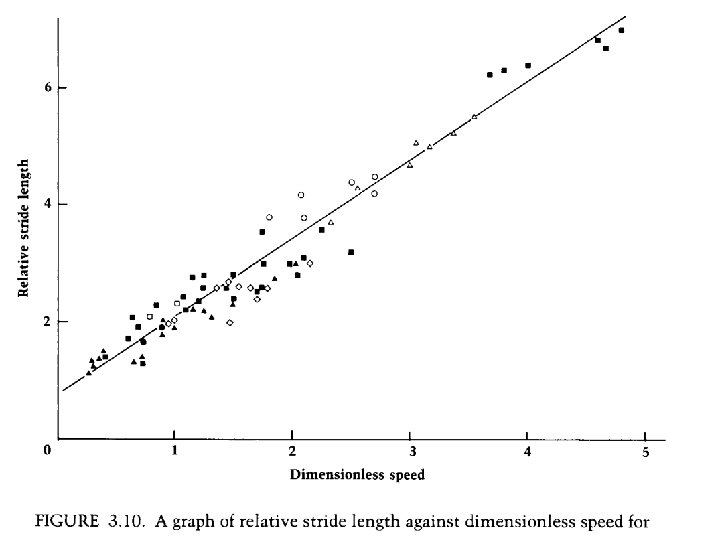
Dinosaur Locomotion z. If we compute relative stride lengths for a large variety of animals ranging in size from dogs to elephants, and regress this against dimensionless speed, we get a very tight straight line fit, as per the figure.
Dinosaur Locomotion z. If we look at a large variety of articulated dinosaur skeletons, and compare leg length with foot length, we find that leg length is about 4 times the foot length. z. Now, assume we have a dinosaur with a foot length of 0. 64 m. We then expect leg length to be 4 x 0. 64 = 2. 56 m.
Dinosaur Locomotion z. We measure stride length (the distance from the impression of one foot print to the next impression of the same foot) and determine it to be 3. 31 m. z. Relative stride length is then 3. 31 ÷ 2. 56 = 1. 3
Dinosaur Locomotion z Now, using the graph, we see that a relative stride length of 1. 3 should result in a dimensionless speed of about 0. 4.
Dinosaur Locomotion z. For our dinosaur with a leg length of 2. 56 m, we get zx / (2. 56 · 10) ½ = 0. 4 zand solving for x yields a speed of about 2 m/s.
Dinosaur Locomotion z Compare this with a human with much shorter legs, who reaches 2 m/s (4. 5 mph) easily in a brisk walk. z Some dinosaur data are given below. These data show that dinosaurs for the most part, were pretty slow. This is in stark contrast to views held by some that dinosaurs were rapid, aggressive, and fleet. It appears that only the smaller forms could run.
Dinosaur Locomotion z. Track Leg L z. Large Theropod 2. 0 z. Large Theropod 2. 6 z. Small Theropod 0. 13 z. Small Theropod 0. 22 z. Small Theropod 1. 0 z. Large Sauropod 3. 0 z. Small Sauropod 1. 5 z. Ornithopod. 14 z. Ornithopod 1. 6 Speed 2. 2 4. 9 2. 0 4. 5 3. 0 6. 7 3. 5 7. 8 3. 6 8. 1 1. 0 2. 2 1. 1 2. 5 4. 3 9. 6 4. 8 10. 7 Gait walk run run walk run
Dinosaur Locomotion z. There are some tracks which show running and indicate speeds of about 12 m/s. However, the larger of these animals weighed about 0. 6 metric tons. This is actually quite fast. Humans run at about 10 m/s, race horses at about 17 m/s, and various antelopes run at 14 m/s. However, note that both of these theropods are not particularly large.
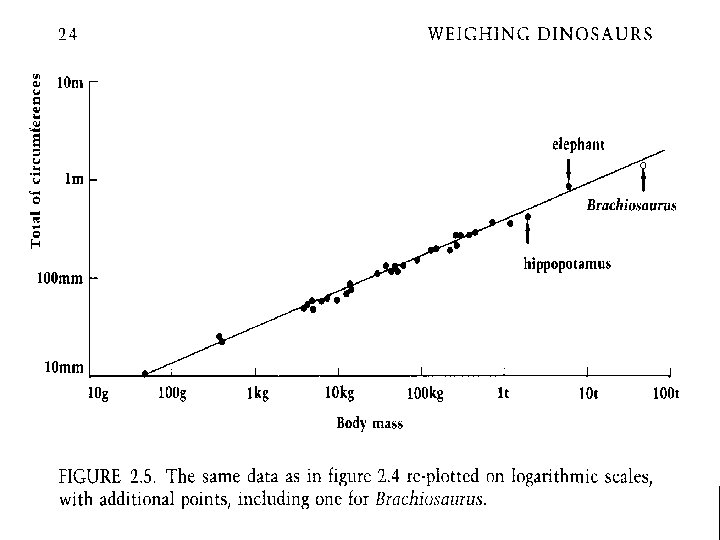
Dinosaur Mass z. How can we estimate the weight of a dinosaur? z. This is actually very simple. We know that mass increases as a cube, while the strength of the appendages increases only as the square. z. If we plot total circumference of the limbs against body mass in metric tons for a variety of animals, we get the following:
Dinosaur Mass z. You can see that the relationship is actually guite tight. In fact, the regression is: z Kg = 0. 000084 ·(total circumference in mm)2. 73
Dinosaur Mass z. Masses (tonnes) of dinosaurs z. Theropods y. Tyrannosaurus rex y. Allosaurus fragilis 4. 5 - 7. 7 1. 4 - 2. 3 z. Sauropods y. Apatosaurus louisae y. Brachiosaurus brancai 33. 5 - 37. 5 31. 6 - 87. 0
Dinosaur Mass z. Ornithopods y. Iguanodon bernissartensis y. Anatosaurus copei - 4. 0 5. 0 - 5. 4 3. 4 z. Stegosaurs y. Stegosaurus ungulatus 2. 0 - 3. 1 z. Ceratopians y. Triceratops prorsus 6. 1 - 9. 4
Turtle Locomotion
Turtle Locomotion z. Stride Frequency = # of strides / unit time. This refers to a particular foot. z. Stride Length = Distance traveled in a single stride (distance from footprint to footprint made by the same foot).
Turtle Locomotion z. Duty Factor = for a foot, the fraction of time for which that foot is on the ground. Eg. , a walking man has a duty factor of 0. 6 for each foot, , 0. 6+0. 6=1. 2, and 20% of the time, both feet are on the ground. A running man may have a duty factor of. 3 for each foot, 0. 3+0. 3=0. 6 and so for 40% of time, both feet are off the ground.
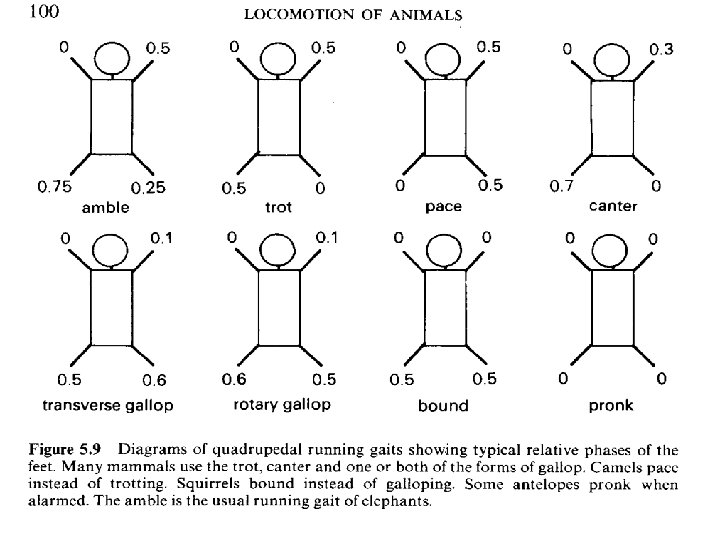
Turtle Locomotion z. A gait with a duty factor >. 5 is called a walk, if duty factor <. 5 it is a run. (Trots, Canters, and Gallops are all running gaits). z. Relative Phase of a foot is time at which it is set down, expressed as a fraction of the stride. Eg. , for a walking man, 1 st foot = start of stride and RP of second foot =. 5
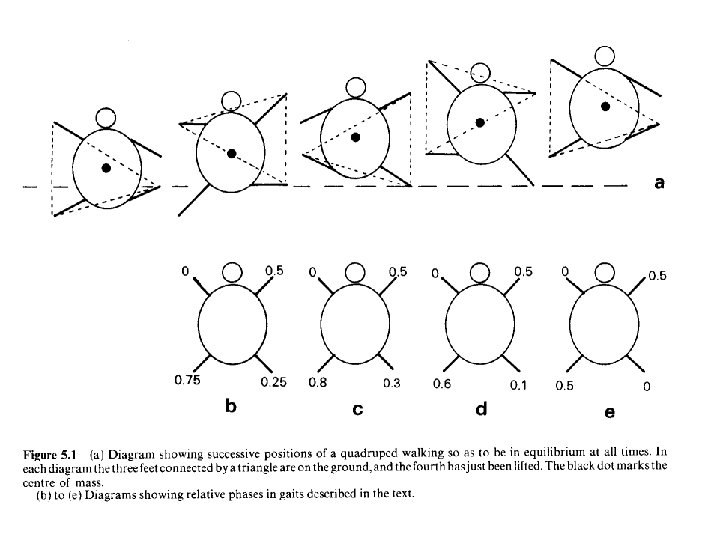
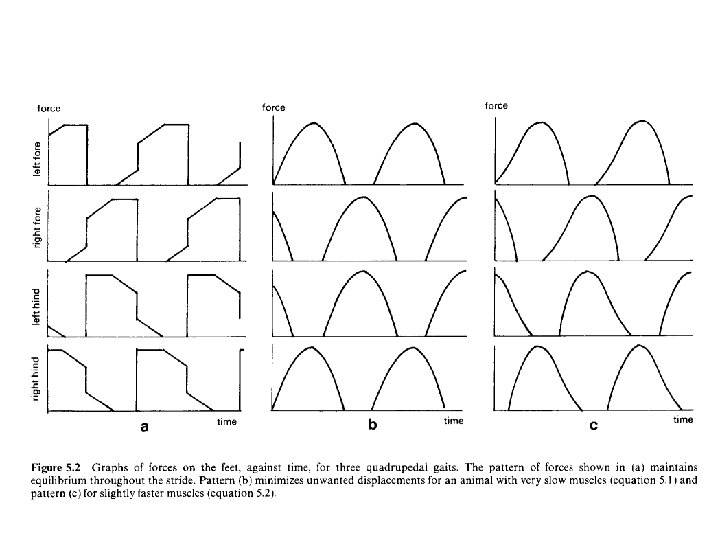
Turtle Locomotion z. Problem for a slow quadruped y. You can maintain perpetual equilibrium during a slow walk if you move only 1 foot at a time so that you always have 3 feet on the ground. y average of Duty Factors must be at least 0. 75. y. Also, it must move its feet in such an order that its center of mass is always over the triangle of support.
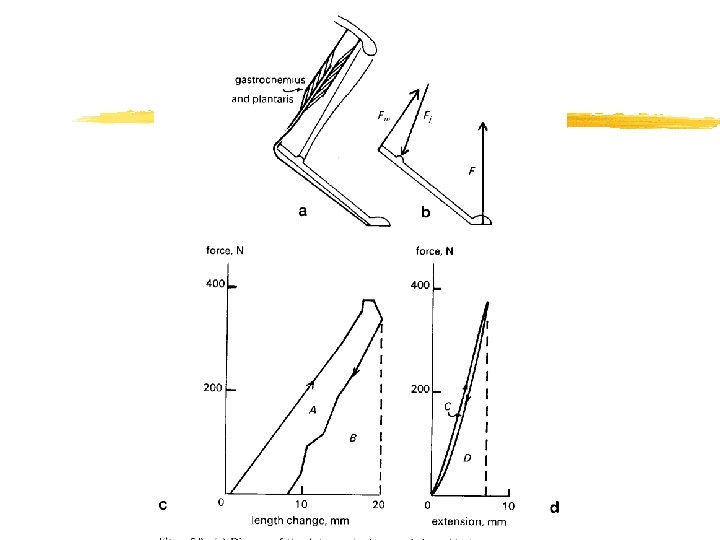
Turtle Locomotion z. Tortoises have DF = 0. 8, so they should use gait ‘B’ or ‘C’ in the figure on the next slide. z. But, they actually use gait ‘D’, and at times only 2 feet are on the ground. they can not maintain perpetual equilibrium and they rise, fall, pitch, and roll as they walk.
Turtle Locomotion z. Why not maintain perpetual equilibrium? z. Answer: their muscles are too slow. z. If muscles are slow, what gaits are possible? y. Minimize range of ht. thru which center of mass rises and falls. y. Minimize range of ’s thru which shell pitches. y. Minimize range of ’s thru which shell rolls.
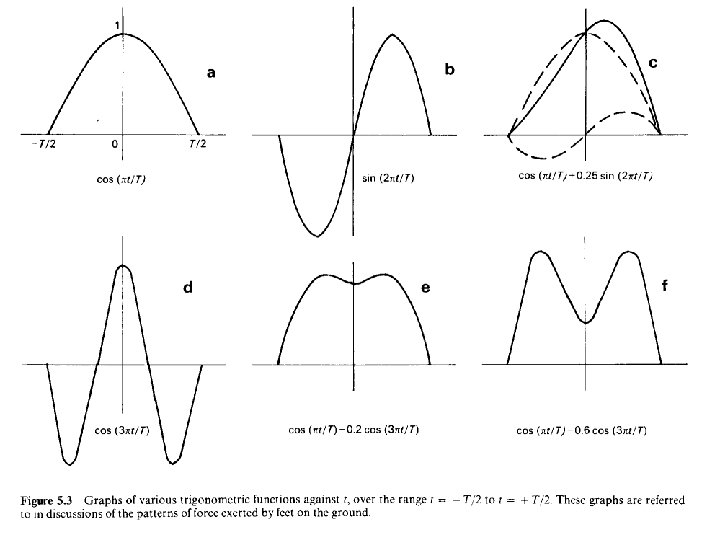
Turtle Locomotion z. We need to understand how turtle feet work in terms of applying force to the ground. z. Let a foot be on the ground from time -T/2 to time T/2. At any time t while it is on the ground, let is exert a vertical force given by z. F = A cos ( t/T) where A is a constant.
Turtle Locomotion z. We can use this model to estimate a wide variety of gaits using different duty factors and relative phases. z. Using this model, only a very few gaits were possible. All others had unacceptable pitch, roll, or height fluctuation. The best possible gait was found to be that in ‘E’, which is not that different from ‘D. ’
Turtle Locomotion z. If we modify our model (make it more realistic) we get: z. F = A (cos ( t/T) + r sin (2 t/T)) where both A and r are constants. z. Using this model, we get an exact fit between tortoise gaits and prediction of the model (gait ‘D’).
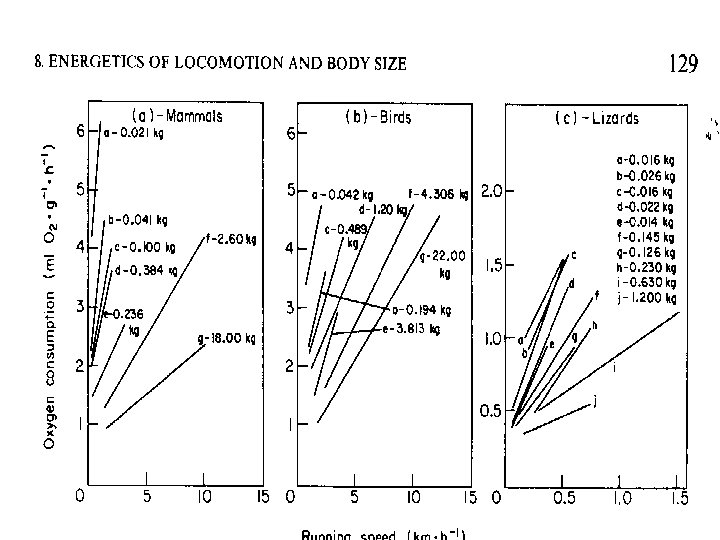
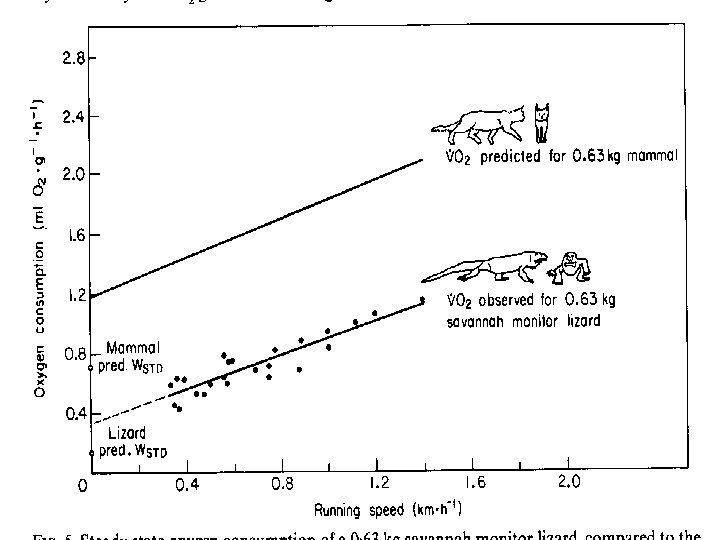
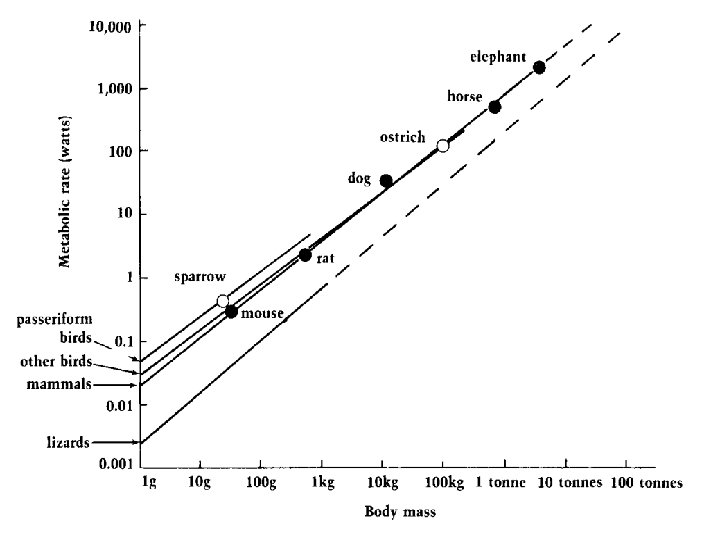
Energetics of Terrestrial Locomotion and Body Size z. Some general relationships: ymetabolic power increases linearly with speed. y. Power is the rate at which work is done. So, metabolic power is the rate at which metabolic work is done. y. In other words, regardless of how fast an animal moves, oxygen consumption changes linearly with speed, not curvilinearly.
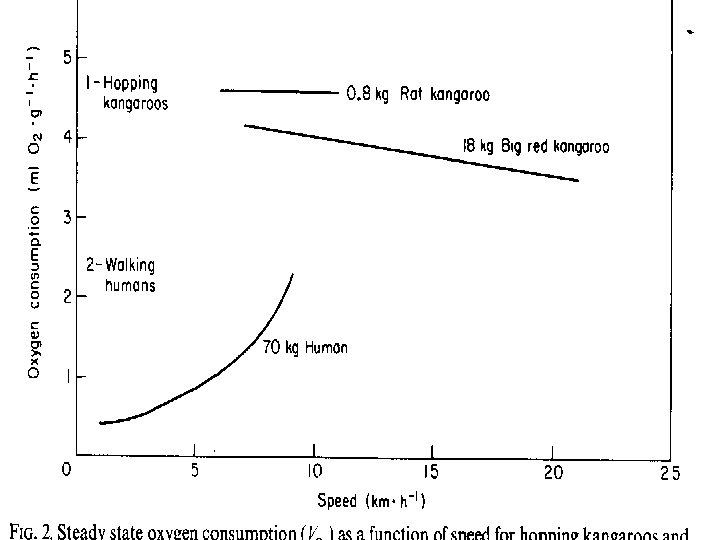
Energetics of Locomotion & Size z. Note that as mass increases, gram specific oxygen consumption decreases. That means, it costs less for a big animal to move than for a little animal to move. z. Note also the difference between lizards, mammals, and birds. z. There are 2 organisms that don’t fit; Humans and kangaroos.
Energetics of Locomotion & Size z. The human pattern is a consequence of the way bipeds walk. Our center of mass dips and rises with each stride. We have one optimal speed (1. 1 -1. 7 m/s) where cost of transport is minimal. z. Kangaroos use a neat trick with their ligaments.
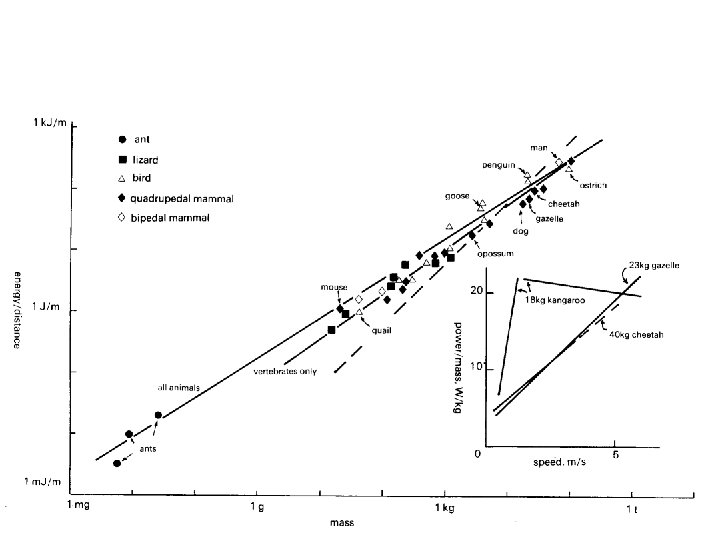
Energetics of Locomotion & Size z. Cost of transport changes in a regular fashion with body size. y. We have already seen that metabolic power increases more rapidly in small animals than in large ones. y. Since metabolic power increases linearly with speed, the rate of increase (slope) of the relationship between rate of oxygen consumption and speed is constant for each animal.
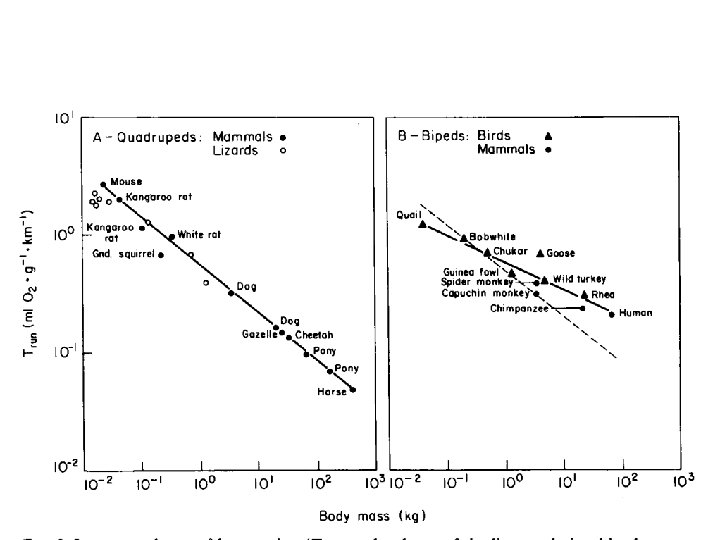
Energetics of Locomotion & Size z. This rate has the units J/kg m, and is the amount of energy required to move one unit of mass one unit of distance. The slope represents an “incremental cost of transport”. z. When these slopes (incremental costs) are plotted as a function of body mass on a logarithmic scale, we get a straight line.
Energetics of Locomotion & Size z. We can use this to generate a simple equation for predicting the incremental cost (slope) from body mass: z. T = 10. 7 m -0. 4 where m = mass in kg and T is incremental cost in J / kg m. z. Notice that the relationship for lizards is not different from that for quadrupedal mammals.
Energetics of Locomotion & Size z. What happens when the animals speed = 0? y. This is the resting metabolic power and the postural cost of locomotion (the cost of standing up). y. To calculate the total power input af an animal running at a given speed, we need both the slope and the y intercept. The y intercept is greater than resting metabolism. The difference is the postural cost.
Energetics of Locomotion & Size z. For mammals, resting metabolic power can be predicted via z. W = 3. 5 m -. 25 z. What is the relationship for lizards? z. W = (0. 013 m. 80 ) 10. 3 T
Energetics of Locomotion & Size z. Can we predict power used for running from body mass and speed? y. SURE ! It is quite simple: y. Metabolic power equals slope times speed plus the y-intercept. y. W run-4 = (T V) + 1. 7 W std-4 ywhere V is speed in m/s. Using out previoius equations, we get the following:
Energetics of Locomotion & Size z. W run-4 = (10. 7 m-0. 4 V) + 1. 7 3. 7 m -0. 4