Linear Feedback Control Instructor Kai Cai Period 2020

Linear Feedback Control Instructor: Kai Cai Period: 2020. 10 -2021. 02

Brief introduction to feedback control

What is control? • System: some entity that dynamically changes over time • Control: influence the change in a desired way (by observing the system and making decisions)

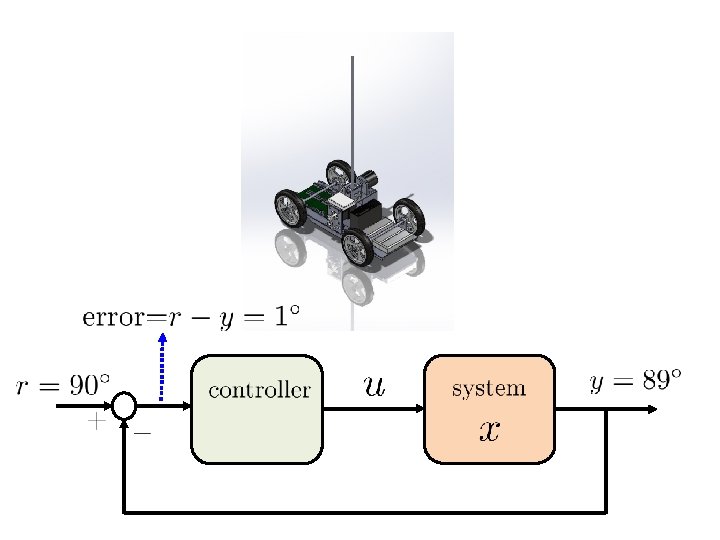
Balance a stick


Building blocks

Building blocks

Building blocks
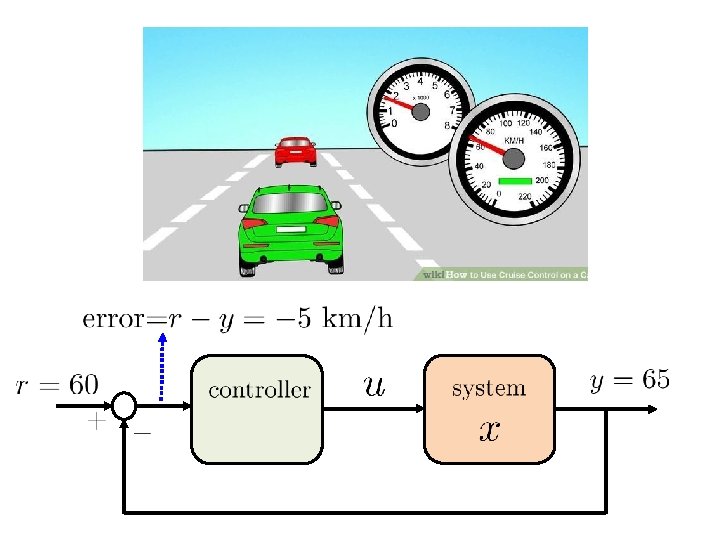

Examples • • Cruise control / lane following Air-conditioning / thermostat Healthcare Power/energy network Multi-robot formation Epidemics Stock market

OCU 12

3 D Formation 13

Course content This course is the continuation of the “Classical Control” course

Classical control Modern control Optimal control Robust control Nonlinear control Sample-data control Networked control Multi-agent control Discrete-event control Cyber-physical control Feedback Control Theory

In “Classical Control” course you learnt 1. State models 2. Transfer function models 3. Stability 4. Feedback loop 5. Nyquist stability criterion 6. Bode plots and control design

In this course you will learn 1. State models 2. Stability and criteria 3. Controllability, state-feedback control design 4. Observability, observer-based control design 5. Tracking and regulation, internal-model control design 6. Optimal control / multi-robot formation control
: https: //www. control. eng. osaka-cu.")
Course logistics • Website (slides and videos uploaded weekly): https: //www. control. eng. osaka-cu. ac. jp/teaching/linear 2020 • Grading: 5 homework assignments, each 20 points; submission through Webclass by deadlines • Q & A: Basically through Web. Class bulletin board (掲示板) (email: kai. cai@eng. osaka-cu. ac. jp)

Review the following content from “Classical Control” • State models – Lecture 2 -1, Lecture 2 -2 (slides and videos) from: https: //www. control. eng. osaka-cu. ac. jp/teaching/classical-2020 – Videos also from: https: //ocuauth-my. sharepoint. com/: v: /g/personal/fyn 37092_osaka-cu_ac_jp/EZc. Px. Zb 3 e. W 9 Lv-Ay. Oz. Nqe 8 ABms. C 8 -Cu. NEsy. CBfc. Y 44 v 08 A? e=RQwoxx https: //ocuauth-my. sharepoint. com/: v: /g/personal/fyn 37092_osaka-cu_ac_jp/Ec. EI_6 -j 4 IRPh. Vu 3 Eb. Grt 2 k. Bbdxu 8 Qe. Jq 6 p. Te. Js. Pl. Ql 6 Sw? e=Ny. Tia. Z • Linearization – Lecture 3 -1, Lecture 3 -2 (slides and videos) from: https: //www. control. eng. osaka-cu. ac. jp/teaching/classical-2020 – Videos also from: https: //ocuauth-my. sharepoint. com/: v: /g/personal/fyn 37092_osaka-cu_ac_jp/Eco. D-Nb. TELt. Hm. Rm. Nx. Bz. WGq. ABNEJEl. Mv. SFRK 8 AX 2 h. Psvd. EA? e=t. Zzp. BV https: //ocuauth-my. sharepoint. com/: v: /g/personal/fyn 37092_osaka-cu_ac_jp/Ef. LMJv. Qrwl. JPj. FRYSQQ 4 JH 0 BRi. ID 6 i 3 -Ki. Zc. Dlb. LIl. SSEw? e=mp. NDI 8
- Slides: 19