Lesson 14 Advanced Navigation Systems Lesson 20 Advanced

 –")
 • GPS = Global Positioning System – all-weather, jam")


 • A receiving station located at a fixed, known location receives")
 • Position: 100 m Hor. 150 m")
 • Inertial Navigation: the process of measuring the movements of")
 • Integrating acceleration gives you velocity • Integrating velocity gives")


 – Contour")

 • Electronic Chart Display Systems (ECDS)")
 • Provides/Distributes NAV data (precise position, time, velocity, pitch-roll-yaw)")

- Slides: 24
Lesson 14: Advanced Navigation Systems
Lesson 20: Advanced Navigation Systems • AGENDA: – NAVSTAR Global Positioning System (GPS) – Inertial Navigation Systems (INS) – Bottom Contour Navigation – Electronic Charts (Raster & Vector) – Navigation Sensor System Interface (NAVSSI) • Applicable reading: Hobbs pp. 540 -555.
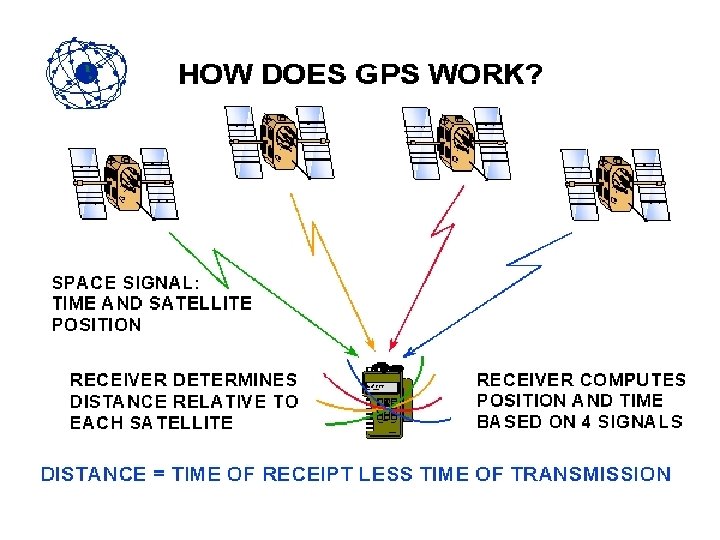
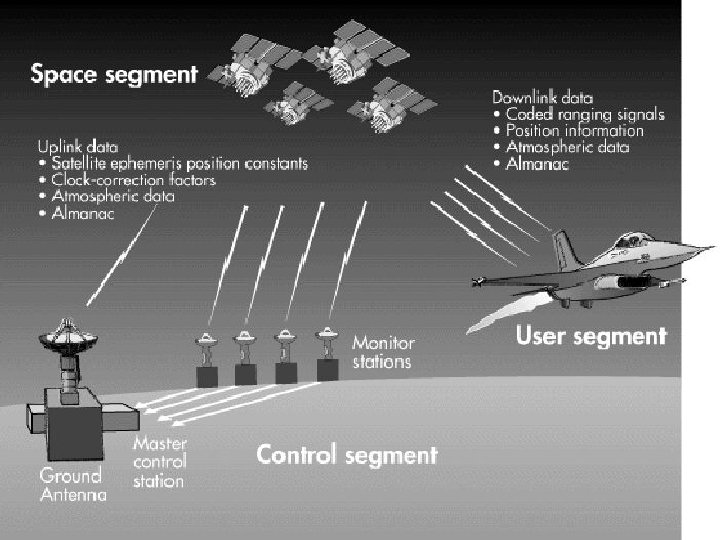
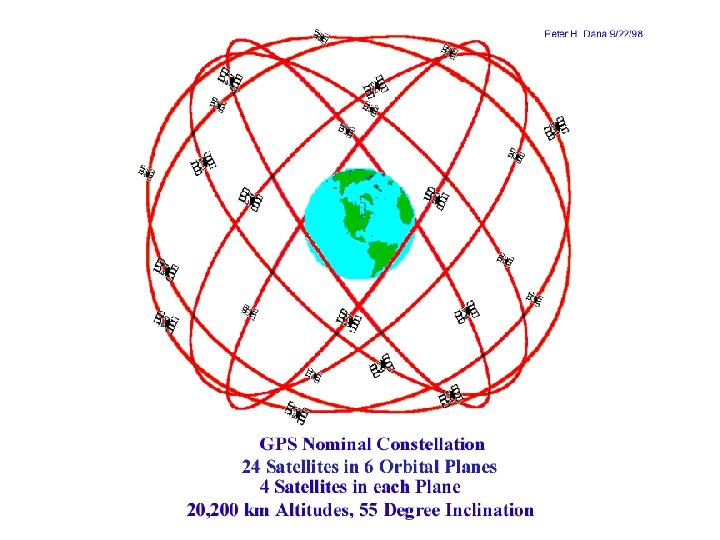
NAVSTAR Global Positioning System (GPS) • GPS = Global Positioning System – all-weather, jam resistant, continuous operation, real-time, passive, worldwide radio navigation system. • Provides: – Extremely accurate 3 D position data – Extremely accurate velocity data – Precise timing services – 3 LOPs provide a Lat. & Long – 4 LOPs provide Lat. , Long. & Altitude
NAVSTAR GPS Uses Civilian Uses • Marine Navigation • Law Enforcement • Hydrographic surveying • Search and Rescue • Collision avoidance Military Uses • Rendezvous • Close Air Support • Mine Warfare • Unmanned Aerial Vehicles (UAV/s) WRN-6
WRN-6
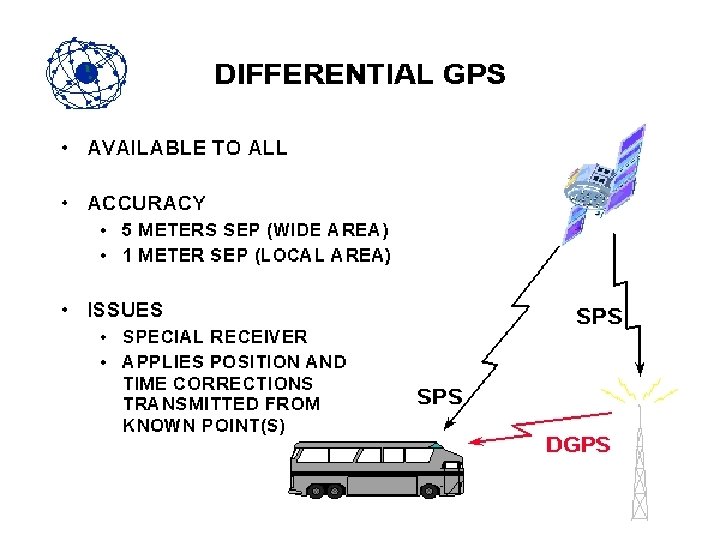
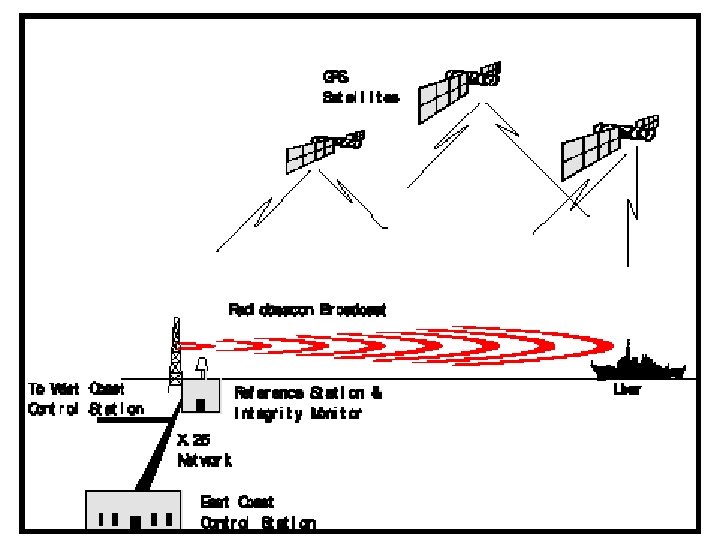
Differential GPS (DGPS) • A receiving station located at a fixed, known location receives position data from several GPS satellites. • The data obtained from GPS is compared to the known location of the station. • Any difference between these two is due to GPS error. • This difference the applied to the individual GPS receiver and thus, increased positional accuracy is obtained
NAVSTAR GPS Accuracy Standard Position Service (SPS) • Position: 100 m Hor. 150 m Vert. • Velocity: . 5 m/sec • Time: 1 millisecond Precise Position Service (PPS) - Military • Position: 16 m Hor. 25 m Vert. • Velocity: . 1 m/sec • Time: 100 nanoseconds
Inertial Navigation System (INS) • Inertial Navigation: the process of measuring the movements of a vessel based on sensed accelerations in known spatial directions. – Gyroscopes – Accelerometers – Electronic computers
Inertial Navigation Systems (cont) • Integrating acceleration gives you velocity • Integrating velocity gives you position/distance traveled • Need to compare to fix, since output is an EP! • Can go up to 30 days w/out update, in theory – Typically go no longer than 7 -14 days • Types – SINS – ESGN – RLGN
Inertial Navigation Systems Current position is inputted Xo Spinning gyro Known mass Accelerometer F=m*a Through Differentiation we get velocity and position (V and Xf) Computer
Bottom Contour Navigation • Establishes position by using the geographic features of the ocean floor. • An echo sounder (fathometer) is used to produce a trace of the ocean floor beneath the vessel, which can be compared to a bottom contour chart to establish the ship’s position. • Can be used as a fix source, but is only accurate when large ocean floor gradients exist
Bottom Contour Navigation • 2 Techniques: – Line-of-Soundings (page 567 in Hobbs) – Contour Advancement (page 568 in Hobbs)
Bottom Contour Navigation Advantages • no satelites required • subs=> no need to go to Periscope Depth (PD) • not vulnerable Disadvantages • not very accurate • requires a cooperative sea bottom
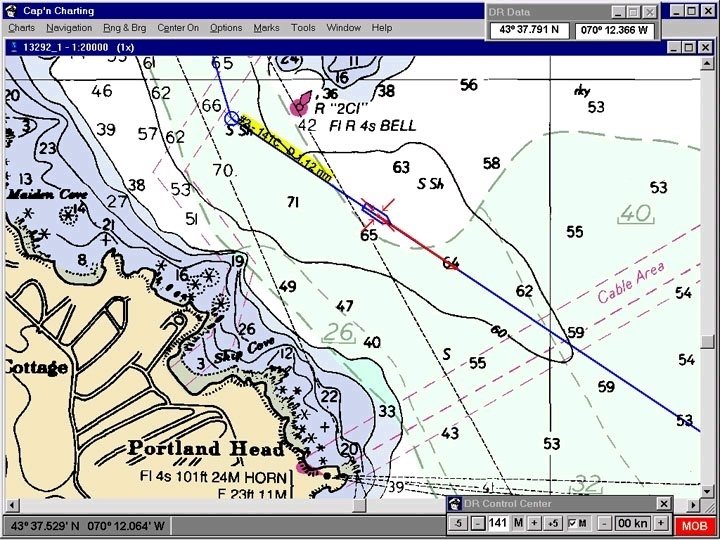
Electronic Charts • Raster Chart Display Systems (RCDS) • Electronic Chart Display Systems (ECDS) • Not approved for Fleet use, but getting closer
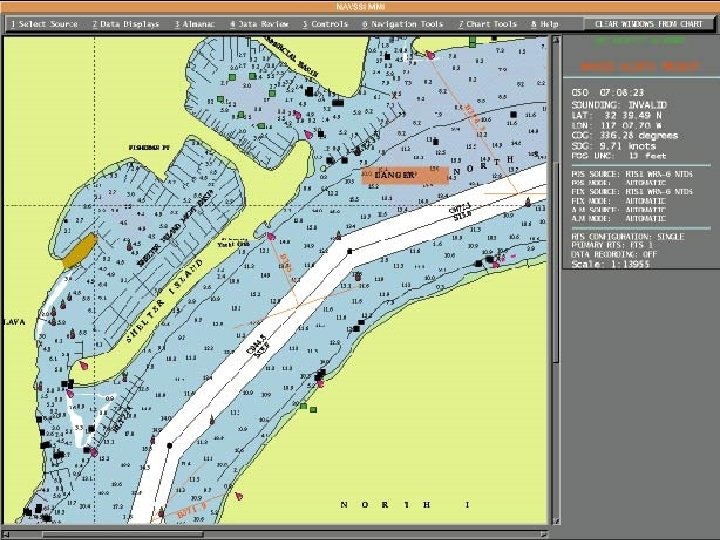
Navigation Sensor System Interface (NAVSSI) • Provides/Distributes NAV data (precise position, time, velocity, pitch-roll-yaw) to multiple users. • NAVSSI has been successfully installed, interfaced, and tested with WSN-5, WRN-6, EM Log, Tomahawk, Outboard, and NTCS-A. • A similar system may be integrated into your ship’s Combat Control System (CCS)
Summary/Review • • • How does GPS work? What is ephemeris and almanac data? Name 3 uses of GPS. How does differential GPS work? How do Inertial Navigation Systems work?