Las Maquinas Herramientas con Control Numrico Introduccin Un



















![F Velocidad de Avance: Las unidades que la definen milímetros por minuto [mm/min]. S](https://slidetodoc.com/presentation_image_h2/08ffe8ece205c653521ec92e0efb318b/image-22.jpg "F Velocidad de Avance: Las unidades que la definen milímetros por minuto [mm/min]. S")



 al comenzar la ejecución todos los ejes")
 N 20 G 90 establece coordenadas absolutas")
 N 20 G 90 G 56; establece")
 N 20 G 90 G 56; N")
 N 20 G 90 G 56; N")
 N 20 G 90 G 56; N")
 N 20 G 90 G 56; N")
 N 20 G 90 G 56; N")
















- Slides: 49
Las Maquinas Herramientas con Control Numérico. Introducción.
Un poco de Historia. Puede hablarse de cuatro generaciones de máquinas de control numérico de acuerdo con la evolución de la electrónica utilizada. 1. Válvulas electrónicas y reles (1950). 2. Transistores (1960). 3. Circuitos integrados (1965). 4. Microprocesadores (1975). A principios de los sesentas las maquinas herramientas funcionaban con CONTROL NUMERICO ( CN ). A principios de los setenta comienzan a utilizarse CONTROL NUMERICO COMPUTARIZADO ( CNC), sobre todo con tarjeta perforada; y luego a través de controladores computarizados cada vez mas precisos y modernos hasta llegar al CAD-CAM. En mediados de los ochenta comienzan los primeros sistemas de manufactura integrada. Y de allí a la integración de maquinas CNC con robots.
Maquinas herramientas convencionales: TORNO, FRESADORA y AGUJEREADORA.
Maquinas Herramientas CNC.
Ejes principales en Maquinas Herramientas CNC
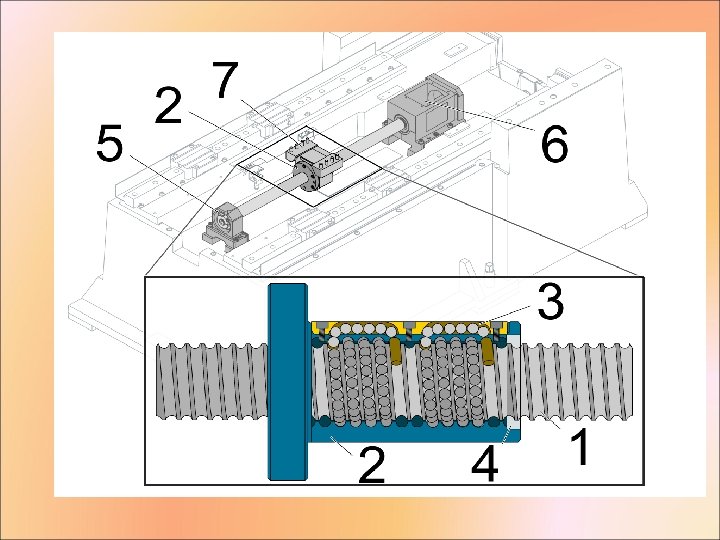
SISTEMAS DE TRANSMISION EN MAQUINAS CNC El accionamiento contiene un conjunto de bolas en recirculación que garantizan la transmisión de esfuerzos del sinfín a la mesa con unas pérdidas por fricción mínimas. Las dos partes de su cuerpo están ajustadas con una precarga para reducir al mínimo el juego transversal entre ellas con lo que se mejora la exactitud y repetibilidad de los desplazamientos. En el orden de las centésimas. En las maquinas convencionales tenemos dos tipos de transmisión: Piñón y cremallera y tornillo y tuerca.
En las maquinas CNC se utiliza una transmisión a través de tornillo a bolas recirculantes.
Para generar el movimiento en los ejes , a través de los tornillos a bolas recirculantes, se utilizan generalmente motores de corriente continua paso o servo motores de corriente alterna y frecuencia variable. • Se mueven en ambos sentidos. • Se aceleran y desaceleran rápidamente. • Son suaves y estables. • Pueden ser motores Paso a Paso , para pares bajos; y generalmente, servomotores.
Encoders. Sirven para detectar el posicionamiento de la maquina. Detectan las posiciones de la maquina, estas pueden ser: ABSOLTUAS ( referidas al cero maquina) INCREMENTALES ( referidas a la posición anterior)
Husillo y sistemas de agarre. El husillo principal acciona el giro del plato de garre en los tornos y en los centros de mecanizado, acciona la herramienta de trabajo.
Cono universal de sujeción de herramientas y carrousel de herramientas.
UTILAJES. Elementos o dispositivos que facilitan o permiten tomar una pieza de trabajao en la máquina herramienta.
HERRAMIENTAS Una herramienta completa de MHCNC presenta generalmente las siguientes partes: acoplamiento portaherramientas (cuerpo, mango o portaplaquita) punta herramienta (plaquita)
CONDICIONES DE CORTE Avance de la herramienta Giro del material o la herramienta Profundidad de pasada. Depende del material a trabajar.
PROGRAMACION. INSTRUCCIONES. -Cero Maquina. -Cero Pieza.
Ejes de Coordenadas. Los Ejes se definirán con el criterio de la mano derecha; orientando al eje z en el sentido vertical. Este es el movimiento principal de la maquina.
Tabla de códigos: Función de Código G Descripción Función Modal. Esto significa que las funciones G, una vez activadas, permanecen activas hasta anularlas mediante otra función G , o bien, mediante una función M. G 00 Posicionamiento rápido G 01 Interpolación lineal G 02 Interpolación Circular horaria G 03 Interpolación Circular anti-horaria G 40 Anulación de compensación de Radio G 41 Compensación de radio a izquierda G 42 Compensación de radio a derecha G 43 Compensación de longitud de la herramienta G 66 Ciclo fijo de seguimiento de perfil G 68 Ciclo fijo de desbaste según el eje X G 69 Ciclo fijo de desbaste según el eje Z G 70 Programación en pulgadas G 71 Programación en milímetros G 90 Programación en coordenadas absolutas G 91 Programación en coordenadas relativas G 94 Velocidad de avance F en mm/min G 95 Velocidad de avance F en mm/rev G 96 Velocidad de corte S en mm/rev Velocidad de corte S constante G 97 Velocidad de corte S en rev/min
F Velocidad de Avance: Las unidades que la definen milímetros por minuto [mm/min]. S Velocidad de giro del husillo: Las unidades que la definen revoluciones por minuto [rpm]. Con la letra T 01, T 02, etc; se designaran las herramientas. Funciones auxiliares M. M 02: Fin de programa. M 03: Encender husillo en sentido horario. M 04: Encender husillo en sentido anti-horario. M 05: Apagar husillo. M 06: Cambio automático de herramienta. M 08: Accionamiento del refrigerante. M 30: Fin de programa con retorno al inicio.
EJEMPLO 1.
Ejemplo 2
Ejemplo 3.
N 10 O 0012; (PRACTICA DE CNC) al comenzar la ejecución todos los ejes son Y llevado a su “cero máquina” X
N 10 O 0012; (PRACTICA DE CNC) N 20 G 90 establece coordenadas absolutas Y X
N 10 O 0012; (PRACTICA DE CNC) N 20 G 90 G 56; establece el “cero pieza”
N 10 O 0012; (PRACTICA DE CNC) N 20 G 90 G 56; N 30 T 03 prepara herramienta 03
N 10 O 0012; (PRACTICA DE CNC) N 20 G 90 G 56; N 30 T 03 M 6; coloca herramienta 03 en el husillo
N 10 O 0012; (PRACTICA DE CNC) N 20 G 90 G 56; N 30 T 03 M 6; N 40 S 1500 M 3; S RPM husillo, M 3 sentido de giro horario
N 10 O 0012; (PRACTICA DE CNC) N 20 G 90 G 56; N 30 T 03 M 6; N 40 S 1500 M 3; N 50 G 41 D 03; compensación de radio a la izquierda
N 10 O 0012; (PRACTICA DE CNC) N 20 G 90 G 56; N 30 T 03 M 6; N 40 S 1500 M 3; N 50 G 41 D 03; N 60 G 0 X 0 Y 0; G 0 movimiento rápido
N 70 G 0 Z 5;
N 70 G 0 Z 5; N 80 G 1 Z-0. 3 F 50; G 1 interpolación lineal, F avance en mm/min
N 70 G 0 Z 5; N 80 G 1 Z-0. 3 F 50; N 90 G 1 Y 40 F 200;
N 70 G 0 Z 5; N 80 G 1 Z-0. 3 F 50; N 90 G 1 Y 40 F 200; N 100 G 2 X 20 Y 60 I 20 J 0; G 2 interpolación circ. horaria X, Y coord. fin del arco centro del arco como incremento con respecto al punto de inicio
N 70 G 0 Z 5; N 80 G 1 Z-0. 3 F 50; N 90 G 1 Y 40 F 200; N 100 G 2 X 20 Y 60 I 20 J 0; N 110 G 1 X 70 Y 60; ó N 110 G 1 X 70;
N 70 G 0 Z 5; N 80 G 1 Z-0. 3 F 50; N 90 G 1 Y 40 F 200; N 100 G 2 X 20 Y 60 I 20 J 0; N 110 G 1 X 70 Y 60; N 120 G 3 X 80 Y 50 I 10 J 0;
N 130 G 91; coordenadas relativas
N 130 G 91; N 140 G 1 Y-40;
N 130 G 91; N 140 G 1 Y-40; N 150 G 1 X-30; ó N 150 X-30;
N 130 G 91; N 140 G 1 Y-40; N 150 G 1 X-30; N 160 G 3 X-10 Y-10 I 0 J-10;
N 130 G 91; N 140 G 1 Y-40; N 150 G 1 X-30; N 160 G 3 X-10 Y-10 I 0 J-10; N 170 G 1 X-40;
N 130 G 91; N 140 G 1 Y-40; N 150 G 1 X-30; N 160 G 3 X-10 Y-10 I 0 J-10; N 170 G 1 X-40; ó N 170 G 90 G 1 X 0 Y 0;
N 130 G 91; N 140 G 1 Y-40; N 150 G 1 X-30; N 160 G 3 X-10 Y-10 I 0 J-10; N 170 G 1 X-40; N 180 G 90 G 0 Z 250;
N 190 M 5; detiene el giro del husillo
N 190 M 5; N 200 G 40; cancela la compensación de radio
N 190 M 5; N 200 G 40; N 210 M 30; FIN DE PROGRAMA