L Differentiate Threshold Integrate R The lightness scaling
















- Slides: 18
L Differentiate Threshold Integrate R
The lightness scaling problem: Q. How should we assign an absolute lightness to a surface? A. Anchoring – brightest region in field of view is declared to be ‘white’ Demo
A major open challenge for lightness perception models: Moving beyond a flat world; distinguishing between abrupt orientation changes and reflectance edges. Sinha, 1992; Sinha and Adelson, 1993
Processing Framework Proposed by Marr Recognition 3 D structure; motion characteristics; surface properties Shape From stereo Motion flow Shape From motion Color estimation Edge extraction Image Shape From contour Shape From shading Shape From texture
Shape from contour I’m sorry, Mr. Mitchell is only painted on the wall.
The perceptual task 3 D shape recovery from a single 2 D image
A constraint based system Symmetry
An implemented constraint-based system Attneave & Frost, 1969 Mackworth, 1973 Perkins & Cooper, 1980 Kanade, 1980 Barrow & Tenenbaum, 1981 Marill, 1989 Fischler & Leclerc, 1992 Experimentation Occam’s razor and complexity Sinha and Adelson A 3 D shape recovery system with 3 general constraints but no object-specific learning
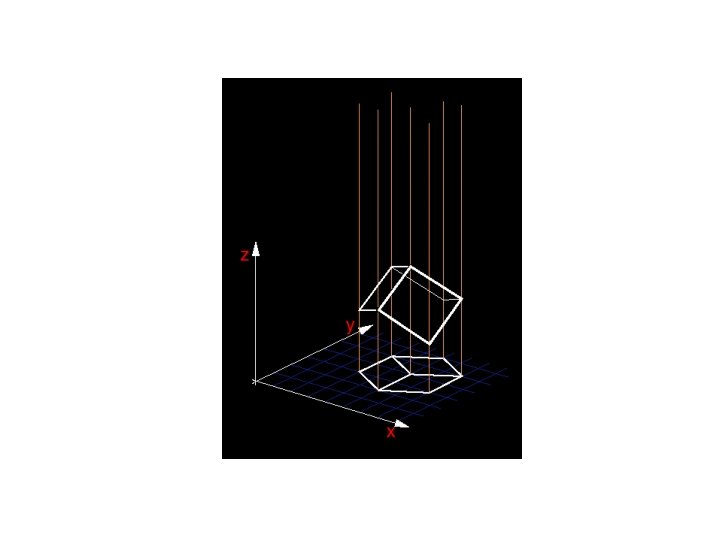
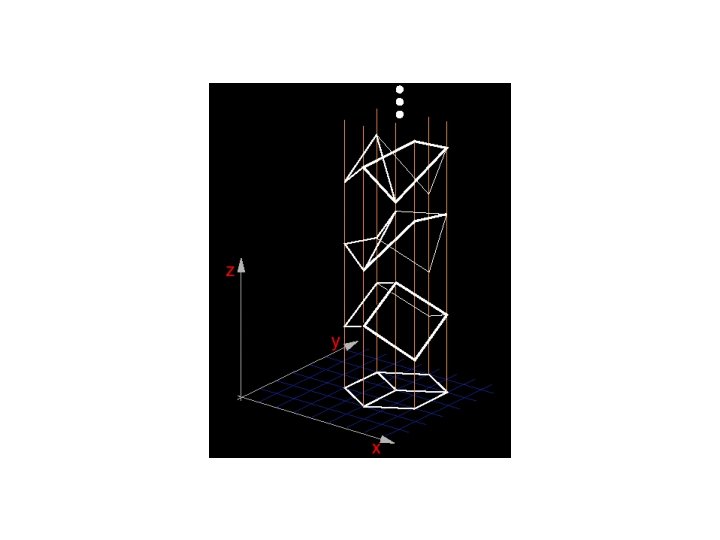
The system in action. . . 2 D Inputs Recovered 3 D shapes
The system in action. . . Video
Where the system works. . .
And where it runs into trouble. . .
Natural objects “Here be dragons” Arbitrary polyhedra Semi-regular polyhedra Polyhedra with rectangular facets Circular discs
High-level learning based hypothesis
Recognition 3 D structure; motion characteristics; surface properties Shape From stereo Motion flow Shape From motion Color estimation Edge extraction Image Shape From contour Shape From shading Shape From texture
Experimental studies of object-specific influences on early perception and a simple model… C: /BCS_core/vis_learning 2. ppt