Komputerowe systemy pomiarowe Wykad I Niektre slajdy pochodz







SP • Przyrządy analogowe + przystawki rejestracyjne (brak systemu) • Przyrządy cyfrowe")




 powstał w 1974 roku. Był on propozycją firmy")
 zakładało standaryzację fizycznego medium transmisyjnego (kabel 24 -żyłowy), prędkości")




 •")










![Mierniki elektryczne Przykład I Woltomierz analogowy o zakresie [0; 300 V] i klasie dokładności](https://slidetodoc.com/presentation_image_h/0a73c028284d34eb1994dcde6c8dfbf5/image-36.jpg "Mierniki elektryczne Przykład I Woltomierz analogowy o zakresie [0; 300 V] i klasie dokładności")

 o błędzie 0. 05% rdg + 5")
- Slides: 38
Komputerowe systemy pomiarowe Wykład I
Niektóre slajdy pochodzą z prezentacji:
Ogólna definicja pomiaru: Pomiar polega na porównaniu stanu wielkości mierzonej A, z innym stanem tej wielkości Awz, uznanym za stan wzorcowy. Obiekt pomiaru Ax Pomiar Awz Wzorzec 1. Dokładność pomiaru nie może być lepsza niż dokładność wzorca. 2. Poziom dokładności pomiaru lub dokładność w odtwarzaniu stanu wzorcowego mierzonej wielkości wyraża się przez niepewność.
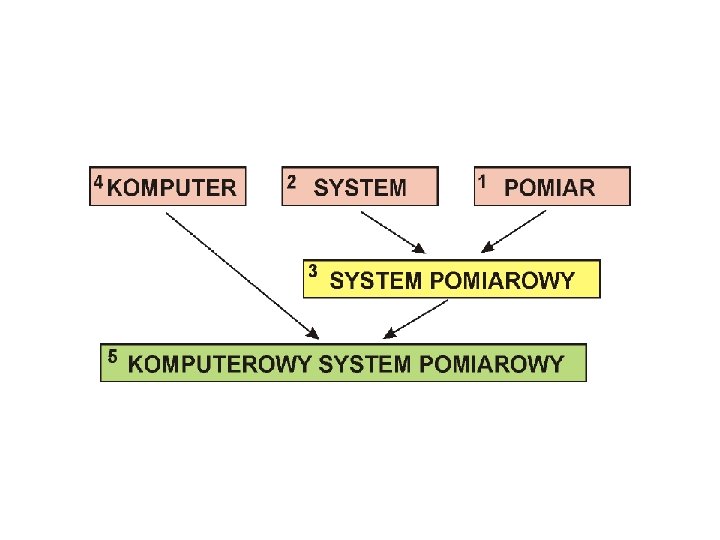
Definicja • System pomiarowy to odpowiednio zorganizowany zestaw elementów stanowiących całość organizacyjną i objętych wspólnym sterowaniem, przeznaczony do wydobycia informacji pomiarowej z obiektu badanego i przekazania jej obserwatorowi w dogodnej postaci. • KSP to system pomiarowy wyposażony w komputer ogólnego przeznaczenia lub specjalizowane urządzenie, które mają za zadanie sterowanie przepływem danych w systemie pomiarowym, tj. pełnią rolę kontrolera (systemu)
Składniki KSP • Urządzenia funkcjonalne realizujące zadania zlecone przez kontroler systemu (komputer z odpowiednim oprogramowaniem jako kontroler systemu synchronizujący pracę pozostałych urządzeń) • Magistrala interfejsowa (zapewniająca transmisję danych i poleceń) • Program sterujący pracą kontrolera
Konfiguracja i struktura systemu pomiarowego Schemat poglądowy przykładowego współczesnego systemu pomiarowego
Cele KSP • Rozwój KSP zmierza do umożliwienia poznania nowych, niemierzalnych wielkości i eksploracji nowych obszarów • Przeniesienie funkcji pomiarowych z człowieka na komputer – Powtarzalność (urządzenia pracują tak samo cały czas) – Dokładność (dane wynikowe są gromadzone i przetwarzane bez etapu przepisywania) – Szybkość (większa wydajność przez minimalizację interwencji operatora)
Ścieżka rozwoju (K)SP • Przyrządy analogowe + przystawki rejestracyjne (brak systemu) • Przyrządy cyfrowe + rejestratory (koniec lat 50 XX w. to początek burzliwego rozwoju elektroniki cyfrowej) • Przyrządy cyfrowe PROGRAMOWANE • Interfejsy specjalizowane (specyficzne dla producenta) • Interfejs HPIB (Hewlett-Packard Interface Bus) • „Nowe” systemy interfejsowe: USB, Fire. Wire, LAN, Wi. Fi (filozofia HPIB została przeniesiona na inne medium transmisyjne) • Przyrząd wirtualny (uważany współcześnie za szczyt rozwoju aparatury kontrolno-pomiarowej)
Woltomierz z 1943 r. • Wynik prezentowany na wskaźniku wychyłowym • Dostępny przełącznik zakresu • Brak możliwości współpracy z rejestratorem
Przystawka rejestrująca BCD 1962 r. • Wydruk na papierze z dowolnego urządzenia z wyjściem BCD (ang. Binary Coded Decimal – kod w którym cyfra dziesiętna jest reprezentowana przez 4 bity) • Konieczność przepisania danych (udział człowieka) w celu dalszego przetwarzania danych pomairowych • Brak możliwości zdalnego sterowania urządzeniem
Interfejs HPIB • Krok milowy w tworzeniu systemów pomiarowych • Tworzenie systemu pomiarowego sprowadzało się do połączenia odpowiednimi kablami urządzeń wyposażonych w odpowiedni interfejs • Kontrolerami systemu były (w początkowym okresie rozwoju) programowalne kalkulatory z których słynęła firma HP
Interfejs HPIB • Kable zakończone zostały gniazdo-wtykami umożliwiając tworzenie systemów w dowolnych konfiguracjach
Standard GPIB (General Purpose Interface Bus) powstał w 1974 roku. Był on propozycją firmy Hewlett-Packard, która miała ujednolicić sposób podłączania urządzeń pomiarowych do komputerów. W tamtym okresie bowiem nie tylko urządzenia te miały różne interfejsy ale nie było również standardów interfejsów we/wy dla komputerów rozpowszechnionych w równym stopniu, jak obecnie RS-232 C, Centronics, czy USB.
Rozwiązanie HP (nazywane początkowo HP-IB) zakładało standaryzację fizycznego medium transmisyjnego (kabel 24 -żyłowy), prędkości transmisji (1 Mbps) jak również pewnych podstawowych protokołów transmisji danych. Od samego początku była to koncepcja "szyny" - oznaczało to, że na jednym kablu przez ten sam interfejs mogło być podłączonych więcej urządzeń. W połączeniu ze standaryzacją pozwalało to na znaczną redukcję kosztów przygotowania systemów pomiarowych.
Interfejs INTERFEJS: - jest to zespół środków zapewniających dopasowanie mechaniczne, elektryczne i logiczne, oraz ustalających funkcjonalne zależności pomiędzy różnymi częściami systemu, zgromadzonymi w celu wymiany informacji (danych). ZADANIA i FUNKCJE interfejsów • konwersja sygnałów (wewnętrzne/zewnętrzne) • Synchronizacja powiadamianie o zdarzeniach (przerwanie) • buforowanie (danych) • zarządzanie (kontroler/nadawca/odbiorca) • korekcja błędów
Klasyfikacja interfejsów ze względu na charakter sygnału: • analogowe • cyfrowe • Szeregowe (RS-232, RS-485, IEEE 1394, USB. . . ) • Równoległe (HPIB, IEE 1284) • szeregowo-równoległe
Transmisja równoległa polega na przesyłaniu wszystkich pól słowa danych jednocześnie. Za względu na fakt, że sprzęt komputerowy, w naturalny sposób wspiera taki sposób wprowadzania/wyprowadzania danych, transmisja równoległa jest bardzo popularna. Ponadto, dzięki zrównolegleniu przesyłu danych, uzyskujemy znaczny przyrost prędkości przesyłu. Udogodnienia te wiążą się jednak z faktem konieczności stosowania łącza dziewięcioprzewodowego, nieodzownego przy tego rodzaju transmisji.
Transmisja szeregowa polega na sekwencyjnym przesyłaniu danych bit po bicie. Należy zaznaczyć, że informacja wprowadzana jest do rejestru przesuwnego styku szeregowego, który bit po bicie wysyła ją na wyjście układu.
Ze względu na zasięg • Wewnętrzne (w obrębie systemu mikroprocesorowego, np. płyty głównej) • Zewnętrzne (transmitujące dane od urządzeń zewnętrznych do komputera
Standaryzacja Działania mające na celu ujednolicenie i uproszczenie konstrukcji warstwy programowej (zarówno po stronie kontrolera jak i urządzenia) Opracowano pewne standardy z myślą o ujednoliceniu zachowania bloków sprzętowych i unifikacji sterowania nimi za pomocą interfejsów komunikacyjnych
Konfiguracja i struktura systemu pomiarowego Konfiguracja KSP to sposób połączenia bloków funkcjonalnych w systemie. Kryteria organizacji przepływu informacji w systemie pomiarowym : • Rodzaj transmisji w systemie : szeregowy, bit po bicie lub równoległy, w którym transmituje się informację słowo po słowie, w formie słów wielobitowych. • Sposób wymiany informacji między częściami systemu ze względu na konfigurację połączenia przyrządów: liniową (magistralową), gwiazdową lub posobną.
Konfiguracja i struktura systemu pomiarowego Konfiguracja liniowa- umożliwia łatwą zmianę struktury systemu (dodanie lub odłączenie przyrządów, zmianę miejsca przyrządu w stosunku do innych przyrządów). PRZYRZĄD 1 KONTROLER SYSTEMU PRZYRZĄD 2 Dane i instrukcje Magistrala systemu PRZYRZĄD N
Konfiguracja i struktura systemu pomiarowego Konfiguracja gwiazdowa- wymaga tylu wieloliniowych wejść komputera ile jest przyrządów w systemie. Zaletą tej konfiguracji jest nieadresowanie przyrządów na magistrali ponieważ są one na stałe podłączone do komputera. PRZYRZĄD 2 PRZYRZĄD 3 Dane i instrukcje PRZYRZĄD 1 KONTROLER SYSTEMU PRZYRZĄD N
Konfiguracja i struktura systemu pomiarowego Konfiguracja posobna - wymiana danych jest możliwa tylko pomiędzy sąsiadującymi przyrządami. Konfiguracja stosowana w przypadku prostych systemów pomiarowych o określonej drodze przepływu informacji. Dane i instrukcje PRZYRZĄD 1 KONTROLER SYSTEMU PRZYRZĄD 2 PRZYRZĄD N
Mierniki elektryczne 31
Mierniki elektryczne Dla elektrycznych mierników analogowych graniczny błąd bezwzględny i graniczny błąd względny są określone przez klasę dokładności k przyrządu. Klasa dokładności przyrządu jest granicznym błędem bezwzględnym wyrażonym w procentach wielkości jego zakresu. Wyraża się wzorem: (10) Norma polska PN 84/E 06501 Mierniki elektryczne analogowe o działaniu bezpośrednim i ich przybory ustala następujące klasy dokładności: 0. 05; 0. 1; 0. 2; 0. 5; 1; 1. 5 i 2. 5 Klasę dokładności podaje się przeważnie na skali przyrządu pomiarowego. 32
Mierniki elektryczne klasa 33
Mierniki elektryczne Dla mierników cyfrowych graniczny błąd pomiaru określa się jako sumę: - błędu d. Rx (podanego w procentach) uzależnionego od wartości mierzonej (wskazanej), oraz - błędu d. FSx wynikającego z braku pewności co do n ostatnich jednostek (kwantów) wskazania cyfrowego. Drugi składnik błędu granicznego jest wyrażony wzorem: gdzie: Nmax oznacza zwiększoną o jeden największą liczbę wskazywaną przez miernik (bez uwzględniania przecinka). 34
Mierniki elektryczne Graniczny błąd przyrządu cyfrowego zapisuje się często korzystając ze wzoru: gdzie: rdg (ang. reading) oznacza wartość mierzoną odczytaną z miernika, natomiast dgt (ang. digit) oznacza wartość ostatniej cyfry danego pomiaru. 35
Mierniki elektryczne Przykład I Woltomierz analogowy o zakresie [0; 300 V] i klasie dokładności 0. 5 wskazał: (1) 297 V, (2) 128 V, (3) 85 V, (4) 14 V Obliczyć graniczne błędy pomiaru bezwzględne i względne oraz podać wyniki pomiaru w pełnej postaci. Graniczny bezwzględny błąd pomiaru jest jednakowy dla wszystkich pomiarów i wynosi max. U = 0. 005 x 300 V = 1. 5 V Graniczne względne błędy pomiaru są różne dla różnych pomiarów: (1) U = 297, 0 V ± 1, 5 V (2) U = 128, 0 V ± 1, 5 V (3) U = 85, 0 V ± 1, 5 V (4) U = 14, 0 V ± 1, 5 V U U [295, 5 V; 298, 5 V] [126, 5 V; 129, 5 V] [ 83, 5 V; 86, 5 V] [ 12, 5 V; 15, 5 V] δ max. U = 0, 505% ≈ 0, 5% δ max. U = 1, 172% ≈ 1, 2% δ max. U = 1, 765% ≈ 1, 8% δ max. U=10, 714% ≈ 10, 8% 36
Mierniki elektryczne Z powyższego przykładu widać, że niedokładność pomiaru zależy od wyboru zakresu miernika. Im wskazanie jest bliższe końca zakresu, tym mniejszy graniczny względny błąd pomiaru. 37
Mierniki elektryczne Przykład II Woltomierz czterocyfrowy (9999) o błędzie 0. 05% rdg + 5 dgt (o dekadowo zmienianych zakresach) wskazał na zakresie pomiarowym 10 V: (1) 9, 912 V, (2) 5, 228 V, (3) 0, 119 V. Obliczyć bezwzględne i względne graniczne błędy pomiaru oraz podać wyniki pomiaru w pełnej postaci. Zakres wskazań woltomierza wynosi Nmax = 104 V (9999+1), zaś wartość jego ostatniej cyfry, q = 10– 3 V. Graniczne błędy pomiaru, bezwzględny i względny, wynoszą: (1) max. U = 9, 956 10– 3 V 10 10– 3 V U = (9, 912 0, 010)V max. U = 0, 1004% 0, 1% (2) max. U = 7, 614 10– 3 V 8 10– 3 V U = (5, 228 0, 008) V max. U = 0, 1456% 0, 15% (3) max. U = 5, 059 10– 3 V 5 10– 3 V U = (0, 119 0, 005) V max. U = 4, 2017% 4, 21% 38