Isostatisme Hyperstatisme dune Chane Cinmatique Ferme C Frext


 Système hyperstatique d’ordre 4")
 (+ actions autres extérieures dont F)")










")

- Slides: 19
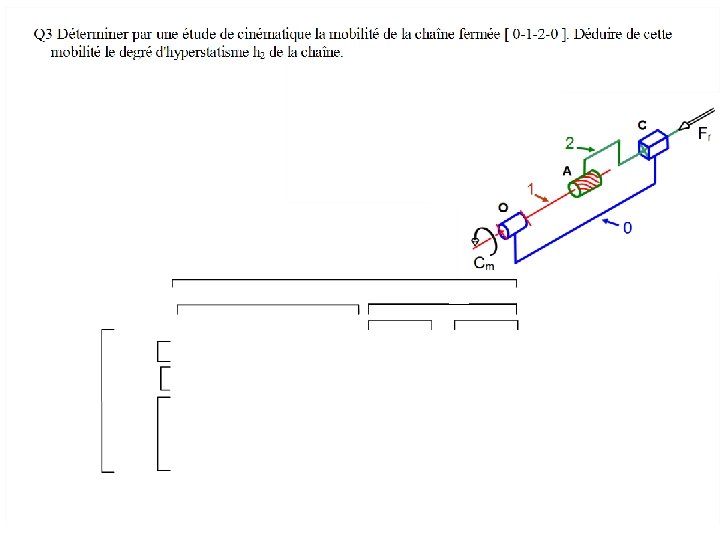
Isostatisme Hyperstatisme d’une Chaîne Cinématique Fermée
C Frext 2 A 1 k 0 O j 0 0 Cm Pivot Glissière Hélicoïdale 5 i 0 A 1 A 4 O C
6 équations 3 inconnues de liaison (1 mobilité) Système hyperstatique d’ordre 4
(+ actions autres extérieures dont Cm) (+ actions autres extérieures dont F)
2 équations linéairement dépendantes
12 équations 15 inconnues de liaison 1 équation « perdue » pour les inc de liaison. mc=1 (Elle permet de déterminer 1 inconnue d’action extérieure) Système hyperstatique d’ordre 4
Rendons le système isostatique Modification n° 1 2 équations linéairement dépendantes Le torseur de la liaison pivot est remplacé par :
Modification n° 1 A O C k 0 j 0 A i 0 1 -4 inc statiques 2 O +4 ddl 0 C Ponctuelle Glissière Hélicoïdale 5
Modification n° 2 Le torseur de la liaison pivot devient : La liaison devient une sphérique de centre . La liaison hélicoïdale n’a plus que 3 inc statiques
A k 0 O C i 0 -2 inc A statiques +2 ddl 1 -2 inc statiques O +2 ddl 0 j 0 C 2 Rotule Glissière Hélicoïdale 3
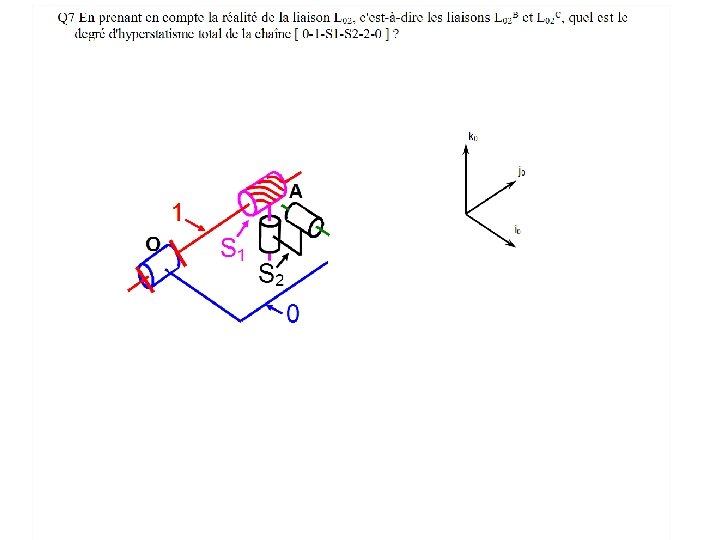
A Rotule 2 Glissière Hélicoïdale 3 1 O 0 C k 0 j 0 A i 0 S 1 1 O S 2 O 0 C 2 Schéma équivalent avec 2 solides et deux liaisons en plus
Modification n° 3 On retrouve le torseur de la liaison pivot comme à l’origine La liaison hélicoïdale n’a plus qu’une inc statique
A k 0 O C i 0 -4 inc A statiques +4 ddl 1 O C 0 j 0 2 Pivot Glissière Hélicoïdale 1
Liées
Liées On reconnaît une liaison pivot-glissant d’axe (A, i 0)
A 1 O C Pivot 2 Glissière Hélicoïdale 1 k 0 0 S 1 1 A j 0 i 0 S 2 O 0 C 2 Schéma équivalent avec 2 solides et deux liaisons en plus