Inverted Pendulum IP Elastic spring Gravitational antispring keff
 Elastic spring + Gravitational anti-spring keff = k. E -")
 Elastic spring + Buckling anti-spring keff = k.")
 KAGRAではIPとGAS filterから構成される Seismic Attenuation System (SAS) が採用さ れている。 (1)観測帯域(>10 Hz)における防振")
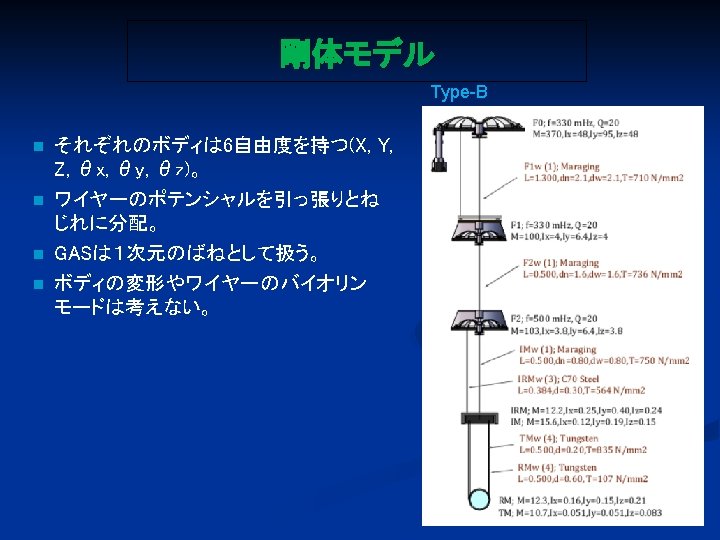
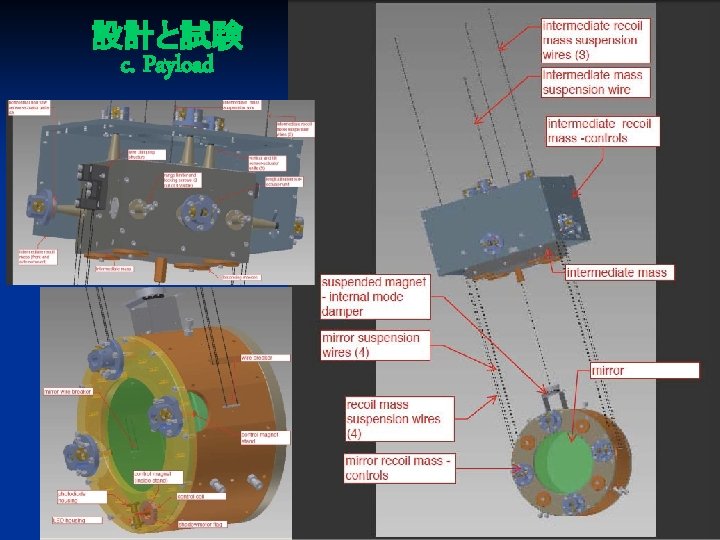
 + Payload (23 kg, cryogenic) Type-B IP")
![KAGRA-SAS の構成 Top filter [Filter 0] Pre-isolator Inverted Pendulum (IP) Filter chain Filter 1](https://slidetodoc.com/presentation_image_h/74b2bad7f4eb6d8548fb1822515d8942/image-13.jpg "KAGRA-SAS の構成 Top filter [Filter 0] Pre-isolator Inverted Pendulum (IP) Filter chain Filter 1")
 n 上部トンネル pre-isolator n 接続ボアホール standard filter chain n 下部トンネル cryostat &")

![要求と予測 i. KAGRA b. KAGRA Target Calculation Requirement Calculation Displacement @10 Hz [m/r. Hz]](https://slidetodoc.com/presentation_image_h/74b2bad7f4eb6d8548fb1822515d8942/image-18.jpg "要求と予測 i. KAGRA b. KAGRA Target Calculation Requirement Calculation Displacement @10 Hz [m/r. Hz]")
 Torsion(. 032 Hz) Torsion(. 020 Hz) IP Yaw(. 051 Hz) IP")
 GAS blades (A), Horizontal accelerometers (B),")
 q ACC Y Actuator PS q LVDT X Length X")

 19 units order: 2011")
- Slides: 28
水平低周波振り子 Inverted Pendulum (IP) Elastic spring + Gravitational anti-spring keff = k. E - k. G
垂直低周波振り子 Geometric Anti-Spring Filter (GAS filter) Elastic spring + Buckling anti-spring keff = k. E - k. B k. E /k. B
Seismic Attenuation System (SAS) KAGRAではIPとGAS filterから構成される Seismic Attenuation System (SAS) が採用さ れている。 (1)観測帯域(>10 Hz)における防振 Standard filters & Mirror suspension (2)RMS変位/速度の低減 Pre-isolator (IP + Top filter) SASは国立天文台に設置されている300 m レーザー干渉計重力波検出器TAMA 300にお いて開発、実証された。 TAMA-SAS
KAGRAにおける防振システムの配置 Type-A IP + GASF (5 stage) + Payload (23 kg, cryogenic) Type-B IP + GASF (3 stage) + Payload (10 kg/20 kg) Type-C Stack + Single/Double-pendulum (~ 1 kg)
KAGRA-SAS の構成 Top filter [Filter 0] Pre-isolator Inverted Pendulum (IP) Filter chain Filter 1 (Filter 1~3 in Type-A) Bottom Filter (BF) Intermediate Mass (IM) Intermediate Recoil Mass (IRM) Payload Test Mass (TM) Recoil Mass (RM) Optical Bench [Breadboard]
Type-A (2層トンネル) n 上部トンネル pre-isolator n 接続ボアホール standard filter chain n 下部トンネル cryostat & payload
Type-B Inverted pendulum Type-C Top filter 2 -stage GASF Mirror Stack Mirror
要求と予測 i. KAGRA b. KAGRA Target Calculation Requirement Calculation Displacement @10 Hz [m/r. Hz] → 3 x 10 -17 4 x 10 -20 RMS (velocity) [μm/s] → 3. 1 0. 08 RMS (displace. ) [μm] → 2. 2 0. 1 0. 05
Torsion(. 012 Hz) Torsion(. 032 Hz) Torsion(. 020 Hz) IP Yaw(. 051 Hz) IP Trans. (. 030 Hz) Vertical(. 239 Hz) IP Long. (. 030 Hz) Roll(. 403 Hz)
設計と試験 a. Pre-isolator Assembling at G&M (May, 2011) GAS blades (A), Horizontal accelerometers (B), Central keystone (C), Motor controlled rotation mechanism (D), Platform for vertical accelerometer (E), Coaxial LVDT and voice coil actuator (F), Motor driven vertical springs (G), Sliding clamps (H), Special tool tuning filter resonant frequency (I), Counterweights for GASF (J), Inverted pendulum legs (K), Magnetic dampers (L), Counterweights for inverted pendulum (M), Motor driven horizontal springs (N), Horizontal LVDT (O), Horizontal voice coil actuators (P), and Hooking points of magnetic damper (Q)
ACC, LVDT IPの制御 (TAMAの例) q ACC Y Actuator PS q LVDT X Length X l Global control of cavity Length after cavity lock l Damping of excited torsion mode using Position Sensor
設計と試験 b. Standard GAS Filter Magic wand LVDT Actuator Measured transfer function at NIKHEF (Feb, 2011)
試験と製造 Standard GAS filter Prototype test: 2011. 2 - (@NIKHEF) 19 units order: 2011 FY Pre-isolator Prototype test: 2011. 8 - (@ICRR) 11 units order: 2012 FY Type-B payload Prototype test: 2012. 6 - (@ICRR) 11 units order: 2013 FY Type-B full-system Test in TAMA: 2013. 1 - (@NAOJ) Pre-isolator prototype at ICRR