Introduction to Soft Copy Photogrammetry Working in a

 n n Analog photogrammetry (~1900) n")




 coordinate system n")



- Slides: 11
Introduction to Soft Copy Photogrammetry Working in a totally digital environment
Advances in photogrammetry n Plane table photogrammetry (~1850) n n Analog photogrammetry (~1900) n n Uses large optical instruments for making maps Analytical photogrammetry (~1960) n n Used techniques common to surveyors Integrated digital processing with analog equipment Digital or soft copy photogrammetry n Processing of aerial photos that are in a digital format
Analog and analytical plotters Wild A-10 Analog Stereoplotter Wild BC-2 Analytical Plotter
Getting photos in a digital format n Acquire them with a digital camera n n n Large format metric cameras are very expensive Technology is advancing relatively fast Scan the photographs n n n Important to include fiducial marks in the scanned image Need large scanner to handle 23 cm photos Geometric distortions can be problematic with officegrade scanners Select appropriate resolution Best to scan film products rather than paper
Why use a photogrammetric approach? n n n Conventional geometric correction methods work by warping the image based on control points and work best in level terrain Photogrammetric methods work by modeling the image acquisition process and can re-project each pixel to the “proper” location so accurate measurement can be made With photogrammetric methods it is possible to: n n Derive elevation/height values Process large blocks of photos at a time
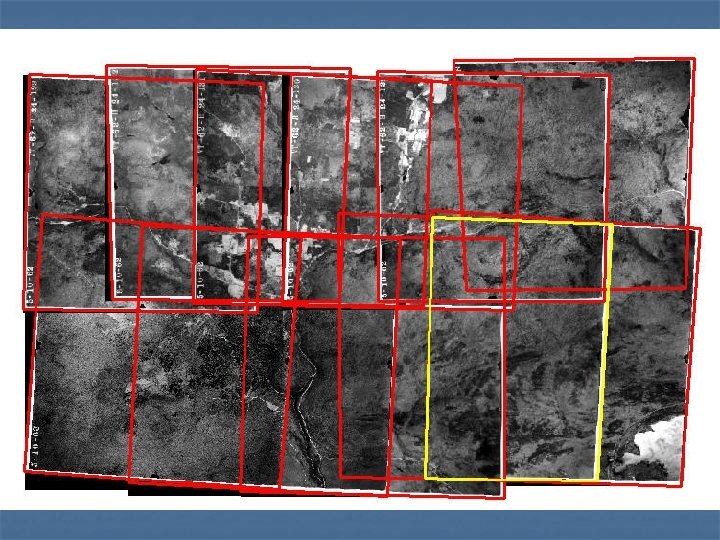
Working with single or multiple images n Working with photos one-at-a-time is very time consuming if many photos will be processed n n Each photo needs at least 3 ground control points ( GCPs) Using a process called block (or areal) triangulation it is possible to more easily process large blocks of photos n n Determines the position and orientation of each photo when it was acquired Only a few (minimum of 3 but generally more) accurate GCPs are needed for a large block Tie points (GCPs derived from the photos) are generated automatically using feature correlation techniques Facilitates creation of mosaics
Coordinate systems n Pixel coordinate system n n Image (imaging plane) coordinate system n n Origin (principal point) in the center based on fiducial mark intersection [units usually mm] Image space coordinate system n n Origin in upper-left Same as “Image coordinate” with addition of a “Z” optical axis with the “Z” origin being the lens which is a distance equal to the focal length from the imaging plane Ground coordinate system n X and Y are same as projected map coordinates and Z is elevation
Determining the relationship between the image plane and the photo n Interior orientation Associates the image pixels to the image space coordinate system n In other words, it transforms the pixel coordinates into the image space coordinates n Uses a camera model that defines: n Fiducial mark locations in image space coordinates n Principal point location in image space coordinates n Focal length n Lens distortion parameters n
Determining the relationship between the image plane and the terrain n Exterior orientation n Defines the position and orientation of the camera when the photo was acquired by associating GCP coordinates (X, Y, Z) with the image space coordinates The position of the photo center is defined by X, Y, and Z (flying height) coordinates The camera orientation is described using angular and rotational parameters n n n roll (omega [ω]) pitch (phi [ϕ]) yaw (kappa [κ])
What can you get out of all this? n Create orthorectified image mosaics n n n Removal of camera and relief displacement to create an image map (convert from central perspective to orthogonal perspective) Create oriented images that can be used in stereo analyst Derive spot elevations, contours, or digital elevation models Measure heights of features Draw planimetric features to create or update maps