Interfacing of stepper motor Stepper motor A stepper

 is a brushless DC electric")

: Stepping motors have 200 rotor")
 , the motor moves by 1. 8°, to do this")

 , the motor moves by 0. 9° to do this")

- Slides: 10
Interfacing of stepper motor
Stepper motor Ø A stepper motor (or step motor) is a brushless DC electric motor that divides a full rotation into a number of equal steps. Ø The motor's position can then be commanded to move and hold at one of these steps without any feedback sensor (an open-loop controller), as long as the motor is carefully sized to the application.
Interfacing of stepper motor: -
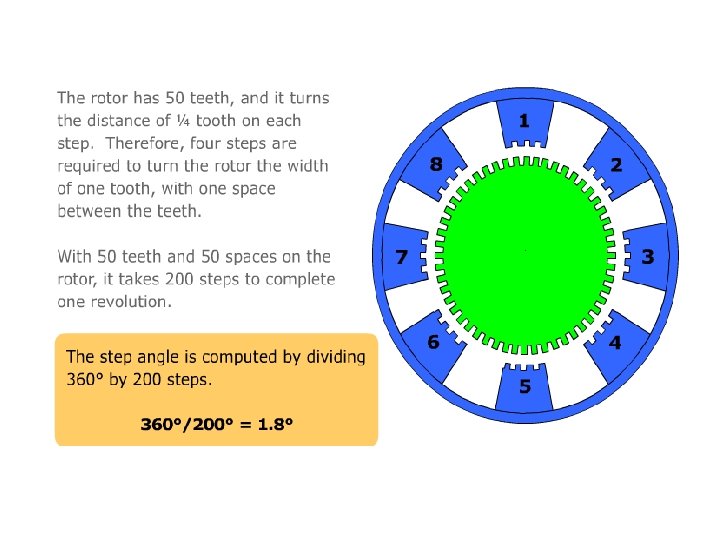
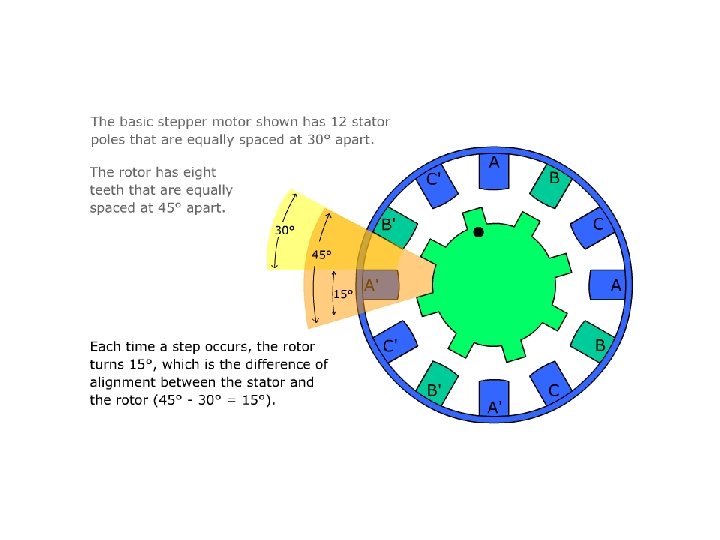
There are two possible modes: 1. Mode 1(Full stepping): Stepping motors have 200 rotor teeth, or 200 full steps per revolution of the motor shaft. Dividing the 200 steps into the 360º of rotation equals a 1. 8º full step angle 2. Mode 2(Half stepping): Half step simply means that the step motor is rotating at 400 steps per revolution. In this mode, one winding is energized and then two windings are energized alternately, causing the rotor to rotate at half the distance, or 0. 9º.
In mode 1(Full stepping) , the motor moves by 1. 8°, to do this two bits are changed at a time , the bit pattern is as A B C D 0 1 05 1 0 0 1 09 1 0 0 A 0 1 1 0 06 Forward Reverse
Program for full stepping MVI A, 80 H OUT 03 H BACK: LXI H, 2000 H MVI C, 04 H UP: MOV A, M OUT 00 H CALL DELAY INX H DCR C JNZ UP JMP BACK Address Data 2000 05 2001 09 2002 0 A 2003 06
In mode 2(half stepping) , the motor moves by 0. 9° to do this 1 bit is changed at a time and the bit pattern is as: A B C D 1 0 0 A 1 0 08 1 0 0 1 09 0 0 0 1 01 0 1 05 0 1 0 0 04 0 1 1 0 06 0 0 1 0 02 Reverse Forward
Program for half stepping MVI A, 80 H OUT 03 H BACK: LXI H, 2000 H MVI C, 08 H UP: MOV A, M OUT 00 H CALL DELAY INX H DCR C JNZ UP JMP BACK Address Data 2000 0 A 2001 08 2001 09 2002 01 2003 05 2004 04 2005 06 2006 02