Informed Search Methods n n How can we

 which returns estimated “value” of expanding")
=366 Arad h(n)=374 h(n)=253 Zerind Arad h(n)=366 h(n)=329 Timisoara Sibiu Oradea h(n)=380 Greedy Best-First")


 n Greedy best-first search minimizes n n Uniform cost")

 = 449 f(n) = 393 Zerind Arad f(n) = 646")
 = 646 Oradea Fagaras f(n) = 526 f(n) = 417")
 = 449 f(n) = 393 Zerind Arad f(n) = 646")






 = 449 Zerind Arad f-Cost limit = 366 f(n) = 393")
 = 449 f(n) = 393 Zerind Arad f(n) = 646")

 n n Uses all available memory Basic idea: n n")









- Slides: 30
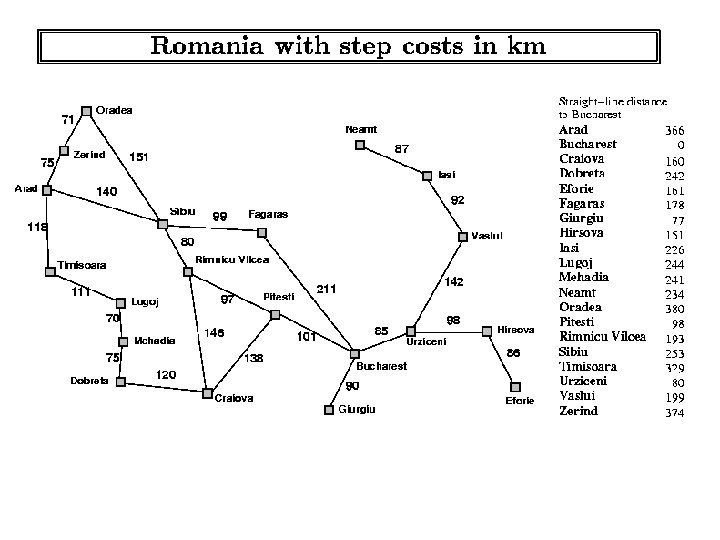
Informed Search Methods n n How can we make use of other knowledge about the problem to improve searching strategy? Map example: n n Heuristic: Expand those nodes closest in “as the crow flies” distance to goal 8 -puzzle: n Heuristic: Expand those nodes with the most tiles in place
Best-First Search n n Create evaluation function f(n) which returns estimated “value” of expanding node Example: Greedy best-first search n n n “Greedy”: estimate cost of cheapest path from node n to goal h(n) = “as the crow flies distance” f(n) = h(n)
h(n)=366 Arad h(n)=374 h(n)=253 Zerind Arad h(n)=366 h(n)=329 Timisoara Sibiu Oradea h(n)=380 Greedy Best-First Search Fagaras Riminicu h(n)=178 h(n)=193 Sibiu Bucharest h(n)=253 h(n)=0
Greedy Best-First Search n n Expand the node with smallest h Why is it called greedy? n n Similar to depth-first search n n Follows single path all the way to goal, backs up when dead end Worst case time: n n Expands node that appears closest to goal O(bm), m = depth of search space Worst case memory: n O(bm), needs to store all nodes in memory to see which one to expand next
Greedy Best-First Search n Complete and/or optimal? n n n No – same problems as depth first search Can get lost down an incorrect path How can you (help) to prevent it from getting lost? n Look at shortest total path, not just path to goal
A* search (another Best-First Search) n Greedy best-first search minimizes n n Uniform cost search minimizes n n n h(n) = estimated cost to goal g(n) = cost to node n Example of each on map A* search minimizes n n f(n) = g(n) + h(n) f(n) = best estimate of cost for complete solution through n
A* search n Under certain conditions: n n n Complete Terminates to produce best solution Conditions n n (assuming we don’t throw away duplicates) h(n) must never overestimate cost to goal n n n admissible heuristic “optimistic” “Crow flies” heuristic is admissible
A* Search Arad f(n) = 449 f(n) = 393 Zerind Arad f(n) = 646 f(n) = 366 f(n) = 447 Timisoara Sibiu Oradea Fagaras f(n) = 526 f(n) = 417 Riminicu f(n) = 413 Craiova Pitesti Sibiu f(n) = 526 f(n) = 415 f(n) = 553
A* Search Arad f(n) = 646 Oradea Fagaras f(n) = 526 f(n) = 417 Riminicu f(n) = 413 Craiova Pitesti Sibiu f(n) = 526 f(n) = 415 f(n) = 553 Riminicu Craiova Bucharest f(n) = 607 f(n) = 615 f(n) = 418
A* Search Arad f(n) = 449 f(n) = 393 Zerind Arad f(n) = 646 f(n) = 366 Timisoara Sibiu Oradea f(n) = 526 f(n) = 447 Fagaras f(n) = 417 Riminicu f(n) = 413 Sibiu Bucharest f(n) = 591 f(n) = 450
A* terminates with optimal solution n A* stops when you try to expand a goal state n n n . . . and declares this the best solution How does it know this is the best? Suppose you try to expand a non-optimal goal state n n n A* always expands node with smallest f Since heuristic is admissible, f is an underestimate If there is a better goal state available, with a smaller f, there must be a node on graph with smaller f than current – so you would be expanding that instead!
More about A* n Completeness n n A* expands nodes in order of increasing f Must find goal state unless n infinitely many nodes with f(n) < f* n n n infinite branching factor OR finite path cost with infinite nodes on it Complexity n n Time: Depends on h, can be exponential Memory: O(bm), stores all nodes
Valuing heuristics n Example: 8 -puzzle n n n h 1 = # of tiles in wrong position h 2 = sum of distances of tiles from goal position (1 -norm, or Manhattan distance) Which heuristic is better for A*? n Obvious that h 2(n) >= h 1(n) for any n n n A* will expand less nodes with h 2 than with h 1 n n n h 2 dominates h 1 Since h 2 >= h 1, any node that A* expands with h 2 it will certainly expand with h 1 But A* may be able to avoid expanding some nodes with h 2 (larger than goal state f) Better to use larger heuristic (if not overestimate)
Inventing heuristics n h 1 and h 2 are exact path lengths for simpler problems n n h 1 = path length if you could transport each tile to right position h 2 = path length if you could just move each tile to right position, irrelevant of blank space Relaxed problem: less restrictive problem than original Can generate heuristics as exact cost estimates to relaxed problems
Strategies n Variable: n Choose variable with fewest possible choices n n Choose variable that limits other choices the most n n most-constrained-variable heuristic most-constraining-variable heuristic Values: n Choose value that leaves most options available n least-constraining-value heuristic
Memory Bounded Search n n Can A* be improved to use less memory? Iterative deepening A* search (IDA*) n n n Each iteration is a depth-first search, just like regular iterative deepening Each iteration is not an A* iteration: otherwise, still O(bm) memory Use limit on cost (f), instead of depth limit as in regular iterative deepening
IDA* Search f(n) = 449 Zerind Arad f-Cost limit = 366 f(n) = 393 Sibiu f(n) = 447 Timisoara
IDA* Search Arad f(n) = 449 f(n) = 393 Zerind Arad f(n) = 646 f-Cost limit = 393 f(n) = 366 Timisoara Sibiu Oradea f(n) = 526 f(n) = 447 Fagaras f(n) = 417 Riminicu f(n) = 415
IDA* Analysis n Time complexity n If cost value for each node is distinct, only adds one state per iteration n n If only a few choices (like 8 -puzzle) for cost, works really well Memory complexity n n BAD! Can improve by increasing cost limit by a fixed amount each time Approximately O(bd) (like depth-first) Completeness and optimality same as A*
Simplified Memory-Bounded A* (SMA*) n n Uses all available memory Basic idea: n n Do A* until you run out of memory Throw away node with highest f cost n n Store f-cost in ancestor node Expand node again if all other nodes in memory are worse
SMA* Example: Memory of size 3 A f = 12
SMA* Example: Memory of size 3 A B Expand to the left f = 15 f = 12
SMA* Example: Memory of size 3 A B f = 15 Expand node A, since f smaller f = 12 C f = 13
SMA* Example: Memory of size 3 A f = 12 forgotten f = 15 C D Expand node C, since f smaller f = 18 f = 13
SMA* Example: Memory of size 3 A f = 12 forgotten f = 15 C f = 13 forgotten f = infinity E f = 24 Node D not a solution, no more memory: so expand C again
SMA* Example: Memory of size 3 A B f = 15 f = 12 C f = 13 Forgotten f = 24 (right) Re-expand A; record new f for C
SMA* Example: Memory of size 3 A f = 12 forgotten = 24 B F f = 15 f = 25 Expand left B: not a solution, so useless
SMA* Example: Memory of size 3 A f = 12 Forgotten f = 24 B f = 15 forgotten f = inf G f = 20 Expand right B: find solution
SMA* Properties n n Complete if can store at least one solution path in memory Finds best solution (and recognizes it) if path can be stored in memory n Otherwise, finds best that can fit in memory