IMU GPS SHIPBORNE GRAVITY ESTIMATION FROM THE COMBINATION
與全球定位系統 (GPS)估算船載重力值 SHIPBORNE GRAVITY ESTIMATION FROM THE COMBINATION OF INERTIAL MEASUREMENT UNIT(IMU) AND GLOBAL")
結合慣性測量元件(IMU)與全球定位系統 (GPS)估算船載重力值 SHIPBORNE GRAVITY ESTIMATION FROM THE COMBINATION OF INERTIAL MEASUREMENT UNIT(IMU) AND GLOBAL POSITIONING SYSTEM (GPS) 王偉龍 指導教授:蕭宇伸 授課教授:張光宗 1



前言 La. Coste and Romberge Air-Sea重力儀 戰術等級的LITEF LCI IMU 6

: • 高斯濾波經由高斯方程式給予權重 (Weights are given by the Gaussian function) •")
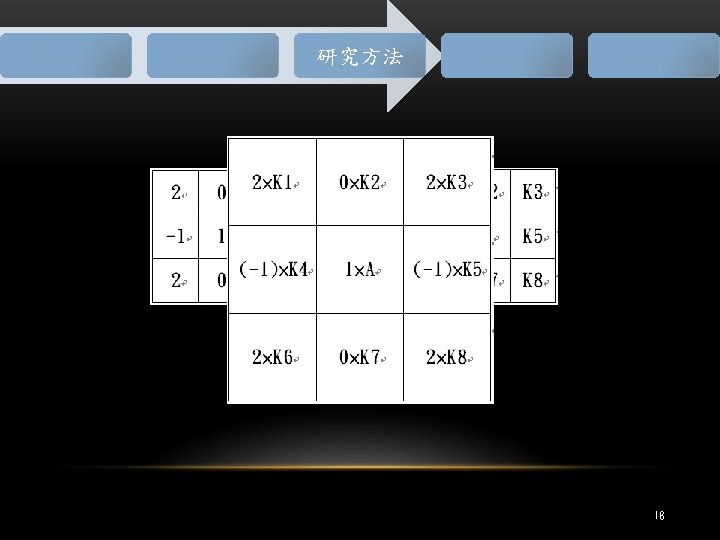
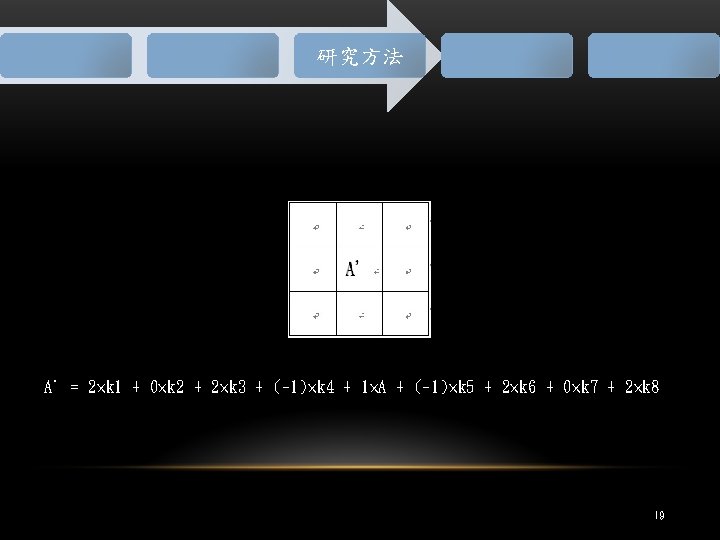
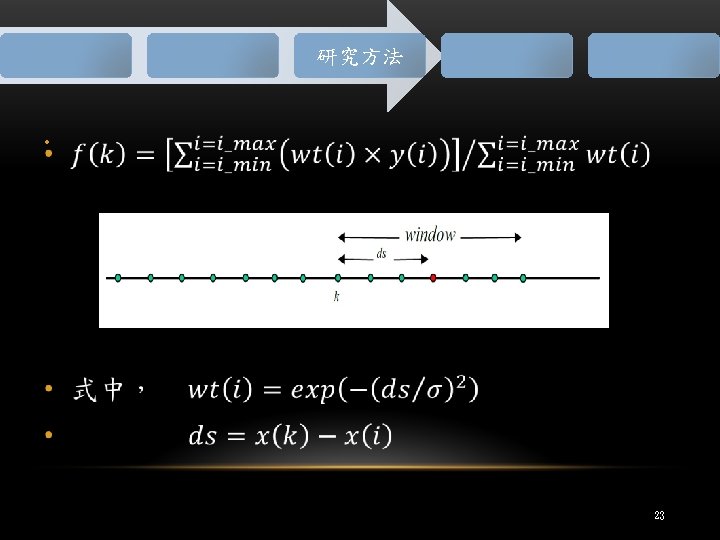
研究方法 • 高斯濾波(Gaussian Filter): • 高斯濾波經由高斯方程式給予權重 (Weights are given by the Gaussian function) • 巴斯卡濾波(Boxcar Filter): • 巴斯卡濾波則是所有權重均相等。 (All weights are equal) • Cosine arch濾波(Cosine arch Filter): • Cosine arch濾波依照餘弦曲線給予權重 (Weights follow a cosine arch curve) 20

研究方法 0514 c,Median 3秒 0514 c,Boxcar 3秒 25

研究方法 • 相關係數 高斯濾波 寬度 4 5 0514 c 0. 79682 0515 a 日期 3 Cos濾波 3 4 0. 85109 0. 75592 0. 85963 0. 61914 0. 64484 0. 59585 0. 595365 0. 66453 0. 57914 0. 88333 0515 b 0. 71062 0. 83210 0. 88868 0516 a 0. 83413 0. 86908 0. 88551 0516 b 0. 69177 0. 80076 0. 86208 0517 a 0. 56553 0. 67004 0517 b 0. 68152 0518 a 6 5 6 0. 78605 0. 89856 0. 87396 0. 79465 0. 88868 0. 87855 0. 85269 0. 76147 0. 87675 0. 83545 0. 73702 0. 72247 0. 63039 0. 75705 0. 69853 0. 75202 0. 77920 0. 73317 0. 72771 0. 79444 0. 69903 0. 42297 0. 73503 0. 83101 0. 88430 0. 88081 0. 79701 0. 89495 0. 87167 0. 73435 0518 b 1 0. 69366 0. 80025 0. 85247 0. 84378 0. 76268 0. 85853 0. 83642 0. 73980 0518 b 2 0. 75919 0. 86458 0. 91754 0. 91671 0. 82296 0. 93036 0. 90695 0. 76063 0519 a 0. 75223 0. 84081 0. 89113 0. 88350 0. 80917 0. 90227 0. 86135 0. 67110 0519 b 0. 70480 0. 78571 0. 83383 0. 78919 0. 75567 0. 85903 0. 73950 0. 35537 0520 a 0. 72906 0. 82844 0. 87908 0. 86740 0. 79344 0. 89068 0. 85999 0. 72712 0520 b 0. 76434 0. 81959 0. 82774 0. 811115 0. 80442 0. 83350 0. 81437 0. 77391 0521 a 0. 77505 0. 87099 0. 92352 0. 92453 0. 92706 0. 86620 0. 93207 0. 83712 0. 68113 28

研究方法 • 相關係數 濾波方法 None Median Gaussian Cosine arch Boxcar 罩窗寬度 1 3 6 5. 25 5 4 4 3 2 3 相關係數 0. 58 0. 34 0. 88 0. 85 0. 79 0. 85 0. 75 0. 64 29

研究方法 0514 c 0517 a 30

研究方法 0519 a 0520 b 31

研究方法 0514 c 0515 a 0515 b 0516 a GPS 2 1 2 IMU 5. 5 5 0. 880 0518 a 相關係數 0516 b 0517 a 0517 b 1 1 1 5. 3 5. 2 5. 1 4. 6 0. 822 0. 888 0. 878 0. 744 0. 772 0518 b 0519 a 0519 b 0520 a 0520 b 0521 a GPS 1 1 6 3 IMU 4. 9 5 4. 8 5. 1 6. 7 6. 3 0. 869 0. 885 0. 827 0. 871 0865 0. 931 相關係數 32


研究成果 0514 c 0519 a 40

研究成果 0514 c 0519 a 41

。INS/GPS空載重力測量之研究—以直接求差法估計重力,國立成功大學測量及空間資訊學系 碩士論文,台南市。 • 黃金維(2012)。100年度臺灣本島近岸船載重力測量作業期末報告,內政部國土測繪中心,台中市。 • 翟邦和(2012)。以GPS決定船姿態角改善船載海面高,國立交通大學土木 程學系碩士論文,新竹市。 • 董緒榮、張守信、華仲春:GPS/INS組合導航定位及其應用,國防科技大學出版社,長沙,1998。 • Glennie, C.")
參考文獻 • 邱俊榮(2002)。INS/GPS空載重力測量之研究—以直接求差法估計重力,國立成功大學測量及空間資訊學系 碩士論文,台南市。 • 黃金維(2012)。100年度臺灣本島近岸船載重力測量作業期末報告,內政部國土測繪中心,台中市。 • 翟邦和(2012)。以GPS決定船姿態角改善船載海面高,國立交通大學土木 程學系碩士論文,新竹市。 • 董緒榮、張守信、華仲春:GPS/INS組合導航定位及其應用,國防科技大學出版社,長沙,1998。 • Glennie, C. and K. P. Schwarz (1999). A comparison and analysis of airborne gravimetry results from two strapdown inertial/DGPS systems, Journal of Geodesy, 73, pp. 311 -321. • Harlan, R. (1968). Eötvös corrections for airborne gravimetry, Journal of Geophysical Research, 73, pp. 4675 -4679. • Hsu, S. K. , C. S. Liu, C. T. Shyu, S. Y. Liu, J. C. Sibuet, S. Lallemand, C. Wang, and D. Reed (1998). New gravity and magnetic anomaly maps in the Taiwan-Luzon region and their preliminary interpretation, Terrestrial, Atmospheric and Oceanic Sciences, 9, pp. 509 -532. • Jekeli, C. (1997). GPS phase accelerations for moving-base vector gravimetry, Journal of Geodesy, 71, pp. 630 -639. • Jekeli, C. (2001). Inertial Navigation Systems with Geodetic Application, de Gruyter, New York. • Kwon, J. H. and C. Jekeli (2001). A new approach for airborne vector gravimetry using GPS/INS, Journal of Geodesy, 74, pp. 690 -700. • LCR(2003). Model “S” air-sea dynamic gravity meter system Ⅱ, La. Coste & Romberg instruction manual, Austin, Texas. • Schwarz, K. P. and Y. C. Li (1996). What can airborne gravimetry contribute to geoid determination? , Journal of Geophysical Research, 101, pp. 17873 -17881. • Schwarz, K. P. and Z. Li (1997). Introduction to airborne gravimetry and its boundary value problems, in “Geodestic Bounday Value Problems in view of the one Centimeter Geoid, F Sanso and R Rummel (eds), Lecture Notes in Earth. Sciences, 65, Springer, Berlin. • Torge, W. (1989). Gravimetry, de Guryter, Berlin. • Wei, M (1998). Flight test results from a strapdown airborne gravity system, J Geodesy, Vol 45 72, pp. 323 -332.

THANKS FOR LISTENING 46
- Slides: 46