Image Specific Color Representation Line Segments in the


















- Slides: 28
Image Specific Color Representation: Line Segments in the RGB Histogram Ido Omer Michael Werman
Image segmentation is a very basic problem in computer vision. Many applications require image segmentation as a preliminary step. Segmentation problems tend to be very difficult and computationally expensive.
A common claim is that the standard RGB color space doesn’t represent colors as we humans understand. Many different color spaces were suggested as more appropriate for segmentation problems. Basically there are two groups of models: Linear models like RGB, YIQ / YUV … Non linear models like Nrgb, CIE–Lab/Luv, HIS/HSV. . .
The idea behind most of these color spaces is to try and imitate the way we humans perceive color. In contrast to this approach, we suggest to try and look at how the camera “sees” the world (well, it actually sees it in RGB …). Instead of trying to imitate the way we humans see the world what does it look like after being sampled by a camera.
Let us see what we need in order to have an image… Lighting Geometry Surface albedo Image Viewing
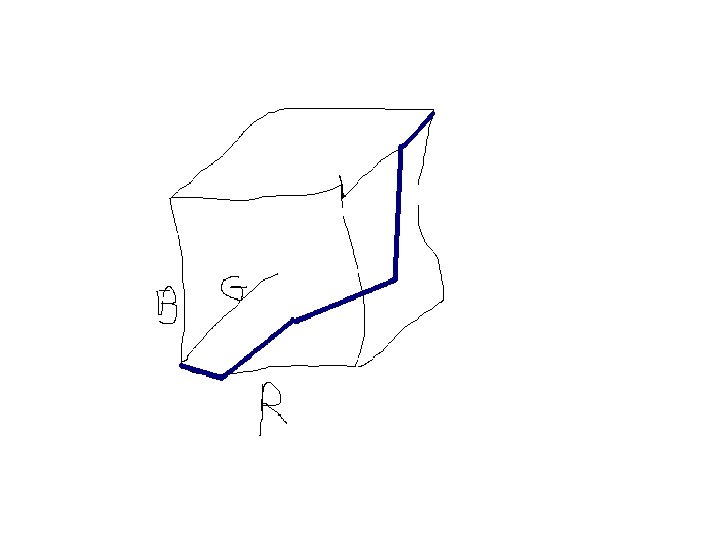
And if we forget about the camera and look at light reflected from a point on a Lambertian surface, It is a function of: The Light source color. Surface color. Geometry. RGB independent The R/G and R/B ratios depend on Lighting and surface colors only. .
Camera inaccuracy: • Real cameras tend to distort the ideal model. • In low intensities the camera’s sensors are not linear. • In high intensities the sensors become saturated. • Even in mid range, sensors sample the world in a noisy manner.
Looking at the histogram: • In mid range, camera sensors tend to be linear. 9
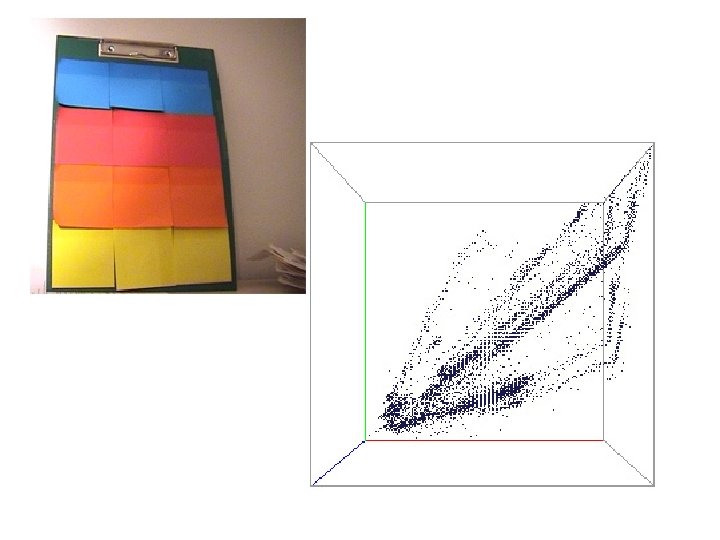
Example: • Source image containing 6 well defined colors each under variant illumination. • The image was manually segmented to it’s components.
Example: RGB histogram HSV histogram
o + hsv Lab III n. RGB
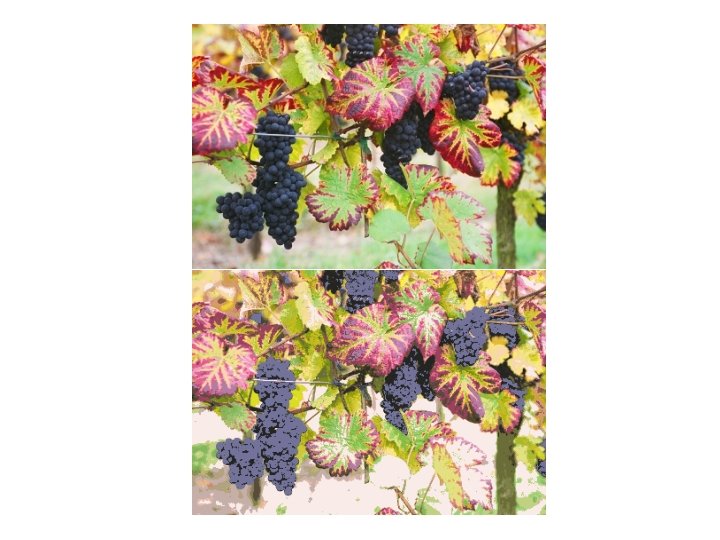
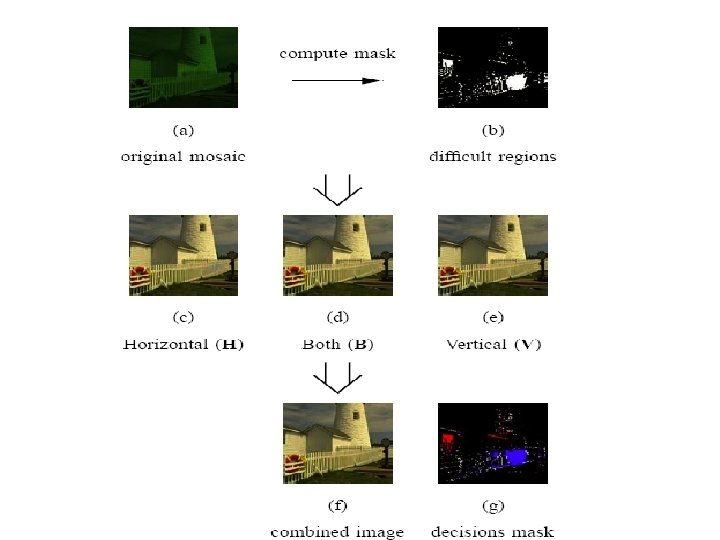
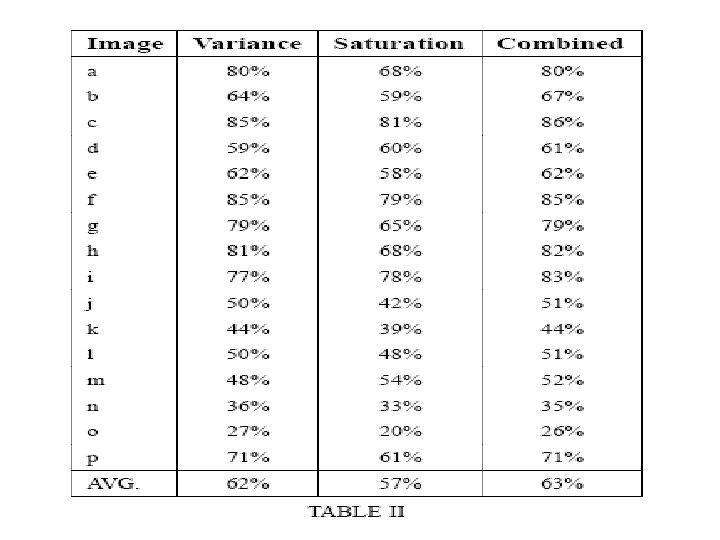
Some results: We not only have the segmentation, we also know which pixels are saturated.
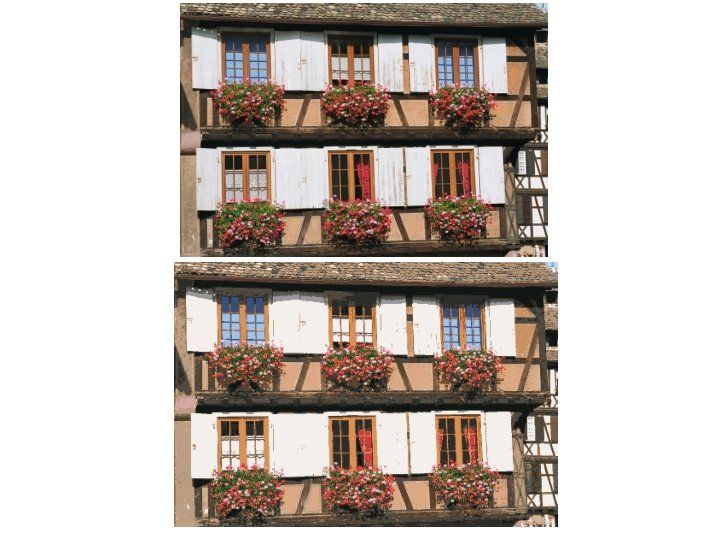
Saturated color correction
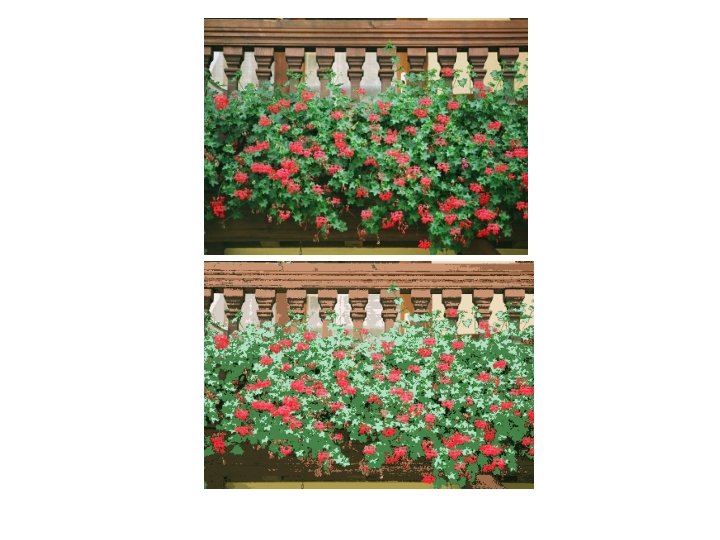
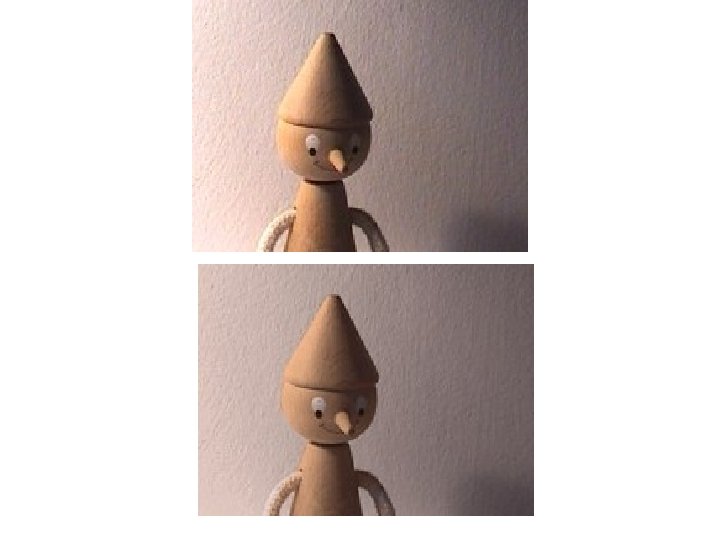
Color Editing
Noise Reduction
Compression GIF