image plane vanishing point camera center ground plane
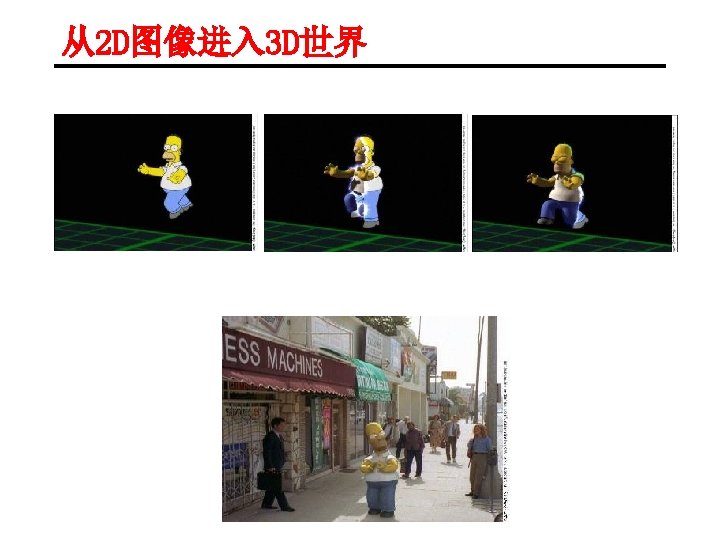
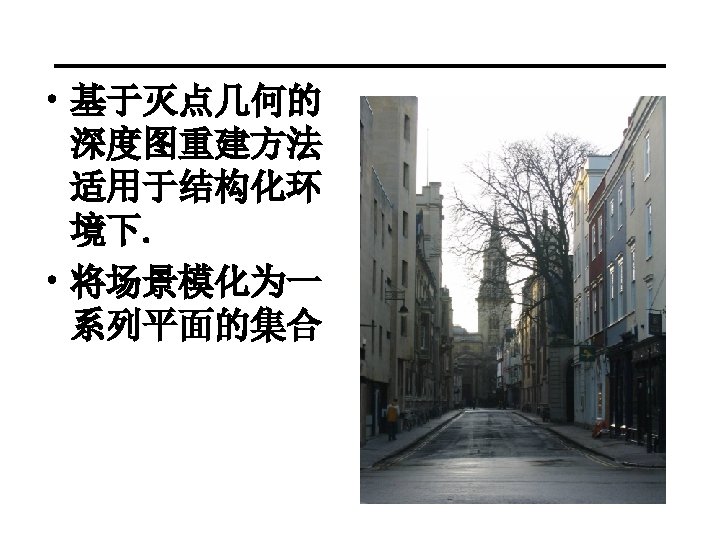
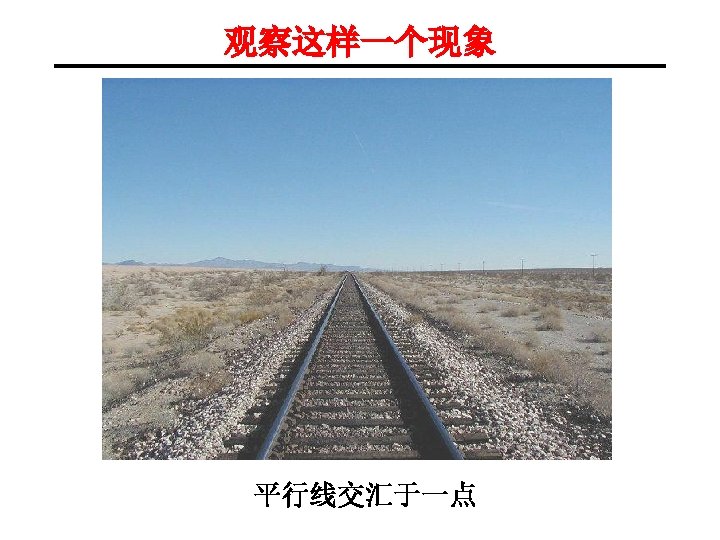
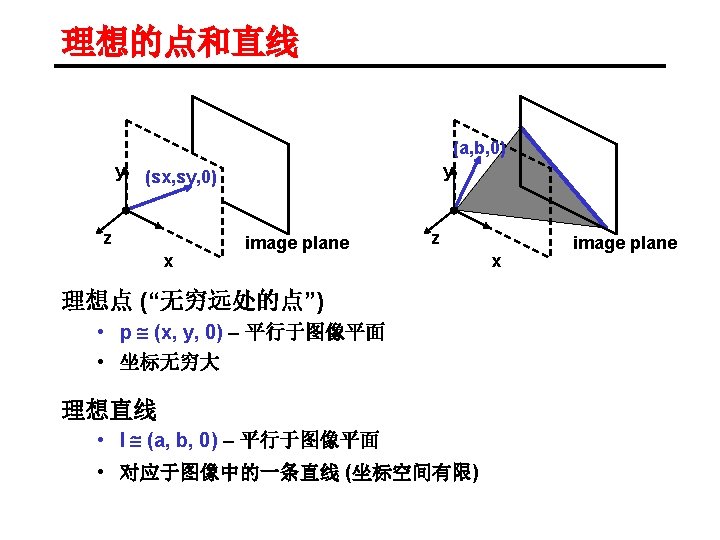

 image plane vanishing point camera center line on ground plane")




 Create a 3 D “theatre stage” of")
, can be represented as an axis-aligned box volume")













 Need to")



")

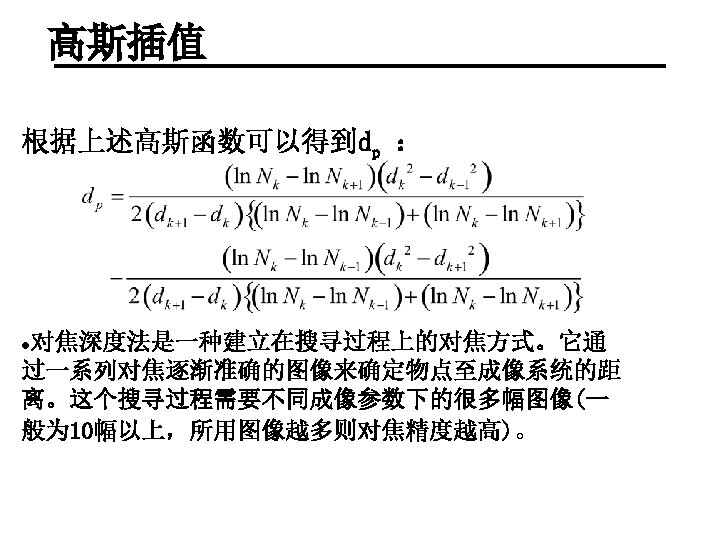
![高斯插值 使用高斯插值获得模糊函数 Focus measure [SML] NP Measured curve Nk Ideal condition Nk-1 Nk+1 dk-1](https://slidetodoc.com/presentation_image/30dd6d9fcd63358b36fcc8f6b23bd637/image-48.jpg "高斯插值 使用高斯插值获得模糊函数 Focus measure [SML] NP Measured curve Nk Ideal condition Nk-1 Nk+1 dk-1")











- Slides: 63
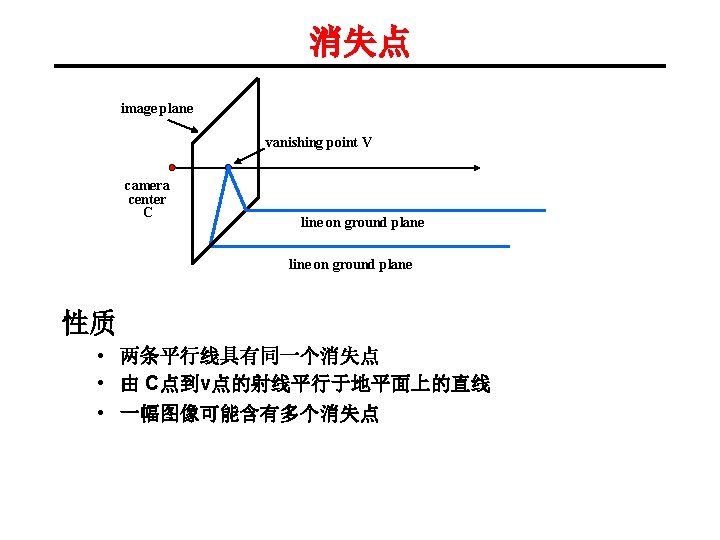
消失点 image plane vanishing point camera center ground plane 消失点 • 无穷远点在图像平面上的投影 • 由理想直线引起
消失点(2 D) image plane vanishing point camera center line on ground plane
Computing vanishing points V P 0 D Properties • P is a point at infinity, v is its projection • They depend only on line direction • Parallel lines P 0 + t. D, P 1 + t. D intersect at P
Computing vanishing lines C l ground plane Properties • l is intersection of horizontal plane through C with image plane • Compute l from two sets of parallel lines on ground plane • All points at same height as C project to l – points higher than C project above l • Provides way of comparing height of objects in the scene
Fun with vanishing points
“Tour into the Picture” (SIGGRAPH ’ 97) Create a 3 D “theatre stage” of five billboards Specify foreground objects through bounding polygons Use camera transformations to navigate through the scene
The idea Many scenes (especially paintings), can be represented as an axis-aligned box volume (i. e. a stage) Key assumptions: • All walls of volume are orthogonal • Camera view plane is parallel to back of volume • Camera up is normal to volume bottom How many vanishing points does the box have? • Three, but two at infinity • Single-point perspective Can use the vanishing point to fit the box to the particular Scene!
Fitting the box volume User controls the inner box and the vanishing point placement (# of DOF? ? ? ) Q: What’s the significance of the vanishing point location? A: It’s at eye level: ray from COP to VP is perpendicular to image plane. Why?
Example of user input: vanishing point and back face of view volume are defined High Camera
Example of user input: vanishing point and back face of view volume are defined High Camera
Example of user input: vanishing point and back face of view volume are defined Low Camera
Example of user input: vanishing point and back face of view volume are defined Low Camera
Comparison of how image is subdivided based on two different camera positions. You should see how moving the vanishing point corresponds to moving the eyepoint in the 3 D world. High Camera Low Camera
Another example of user input: vanishing point and back face of view volume are defined Left Camera
Another example of user input: vanishing point and back face of view volume are defined Left Camera
Another example of user input: vanishing point and back face of view volume are defined Right Camera
Another example of user input: vanishing point and back face of view volume are defined Right Camera
Comparison of two camera placements – left and right. Corresponding subdivisions match view you would see if you looked down a hallway. Left Camera Right Camera
2 D to 3 D conversion First, we can get ratios left right top vanishing point back plane bottom
2 D to 3 D conversion • Size of user-defined back plane must equal size of camera plane (orthogonal sides) • Use top versus side ratio to determine relative left right height and width top dimensions of box • Left/right and top/bot camera ratios determine part of bottom pos 3 D camera placement
Depth of the box Can compute by similar triangles (CVA vs. CV’A’) Need to know focal length f (or FOV) Note: can compute position on any object on the ground • Simple unprojection • What about things off the ground?
DEMO Now, we know the 3 D geometry of the box We can texture-map the box walls with texture from the image
Foreground Objects Use separate billboard for each For this to work, three separate images used: • Original image. • Mask to isolate desired foreground images. • Background with objects removed
Foreground Objects Add vertical rectangles for each foreground object Can compute 3 D coordinates P 0, P 1 since they are on known plane. P 2, P 3 can be computed as before (similar triangles)
9. 3 基于焦点变换的深度图重建 Shape From Defocus(Focus)
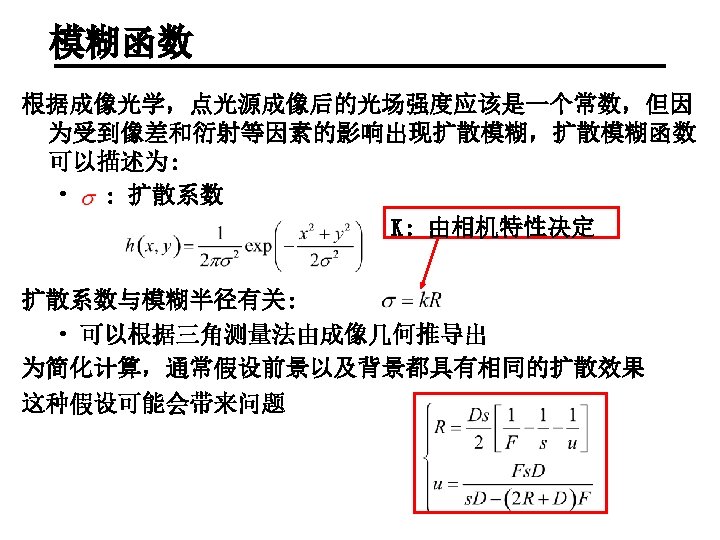
模糊函数 screen F F D/2 Blurring radius: R<0 s u 2 R : R<0 Biconvex v F F Blurring radius: R>0 D/2 s u 2 R : R>0 v screen
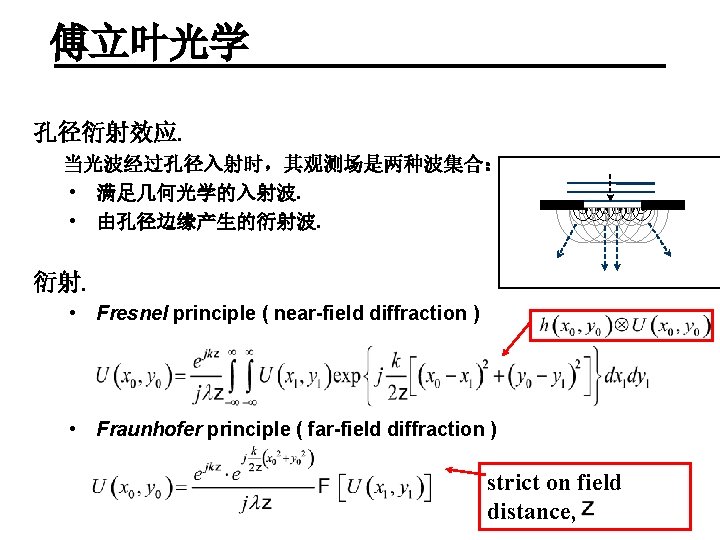
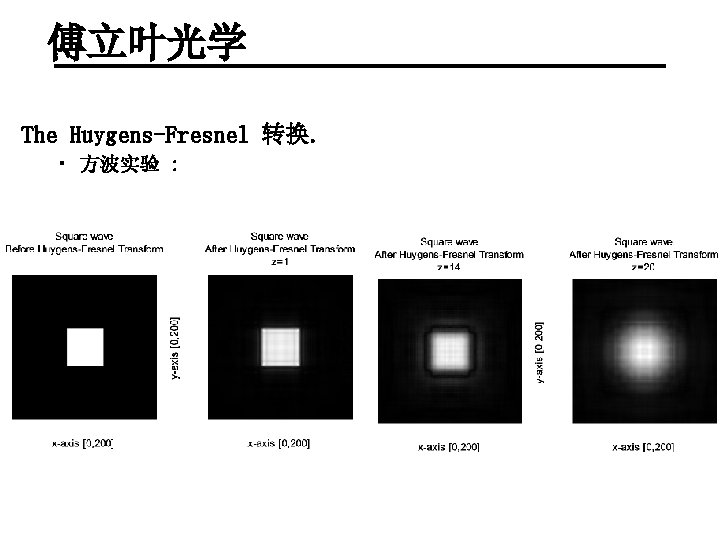
高斯插值 使用高斯插值获得模糊函数 Focus measure [SML] NP Measured curve Nk Ideal condition Nk-1 Nk+1 dk-1 dp d k dk+1 displacement dp 是照相机获取最佳效果的距离 ,
Light Field Camera • A light-field camera, also called a plenoptic camera, is a camera that uses a microlens array to capture 4 D light field information about a scene. Such light field information can be used to improve the solution of computer graphics and computer visionrelated problems.
Stanford multi-camera array 640 × 480 pixels × 30 fps × 128 cameras synchronized timing continuous streaming flexible arrangement
Light field photography using a handheld plenoptic camera Ren Ng, Marc Levoy, Mathieu Brédif, Gene Duval, Mark Horowitz and Pat Hanrahan
Conventional versus light field camera
Conventional versus light field camera uv-plane st-plane
Prototype camera Contax medium format camera Kodak 16 -megapixel sensor Adaptive Optics microlens array 125μ square-sided microlenses 4000 × 4000 pixels ÷ 292 × 292 lenses = 14 × 14 pixels per
Digital refocusing Σ Σ refocusing = summing windows extracted from several microlenses
Example of digital refocusing
Digitally moving the observer Σ Σ moving the observer = moving the window we extract from the microlenses
Example of moving the observer
Moving backward and forward