Image Enhancement and Restoration In Frequency Domain Filtering

 Shift DFT F(u, v) H(u, v) F(u, v)H(u,")


")
 High Pass")
")
")

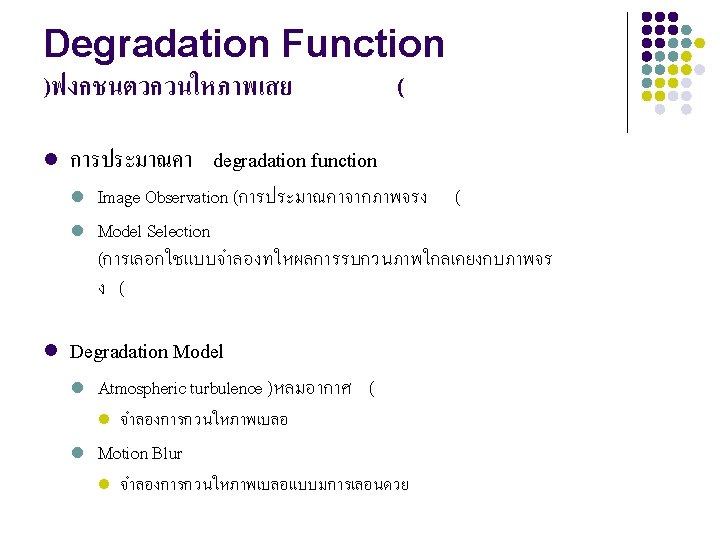
![ILPF ripple effects DFT Original image [f(x, y)] f*h h(x, y) F(u, v) H(u,](https://slidetodoc.com/presentation_image_h/a6f9f4ea4673b6bb3b29502c1687074b/image-10.jpg "ILPF ripple effects DFT Original image [f(x, y)] f*h h(x, y) F(u, v) H(u,")
 h(x, y) n=1 n=2 n=3 n=4")

")


")

")

")

 h(x, y)")

 Histogram equalization")
 Ideal BRF Butterworth BRF Gaussian BRF")
 F(u, v) Inverse DFT F(u, v)H(u, v) g(x, y)")
 DFT F(u, v) f(x, y) Inverse DFT F(u, v)H(u, v)")

 l Based on assumption of no noise")
 Full filter Blured image Turbulance (k=0. 0025)")
 l Using Minimum Mean Square Error l Sometimes called least")

- Slides: 33
Image Enhancement and Restoration In Frequency Domain
Filtering in Frequency Domain f(x, y) Shift DFT F(u, v) H(u, v) F(u, v)H(u, v) IDFT (-1)x+y Shift (-1)x+y g(x, y)
Relationship between Convolution and DFT
Comparison of Convolution and FFT Computational Process Convolution FFT Simple Complex with many steps Number of Multiplications N x N -> image size n x n -> filter window size
Number of Multiplication (FFT vs Convolution)
Filter Categories l Regular Filter l l l Low Pass Filter (LPF) High Pass Filter (HPF) Band Pass Filter (BPF) Band Reject Filter (BRF) High Frequency Emphasis Filter (HFE) Inverse Filter § l Wiener Filter (Minimum Mean Square Error Filter)
Regular Filter Low Pass Filter (LPF)
Ideal Low Pass Filter (ILPF)
ILPF results Original image
ILPF ripple effects DFT Original image [f(x, y)] f*h h(x, y) F(u, v) H(u, v) G(u, v) = F(u, v) H(u, v) Inverse DFT g(x, y)
Butterworth Low Pass Filter (BLPF) h(x, y) n=1 n=2 n=3 n=4
n=2 BLPF results Original image
Gaussian Low Pass Filter (GLPF)
GLPF results Original image
Applications of Low Pass Filter Character recognition Picture Studio Decoration
Ideal High Pass Filter (IHPF)
IHPF results
Butterworth High Pass Filter (BHPF)
BHPF results
Gaussian High Pass Filter (GHPF)
GHPF results
Laplacian Filter (Second-order Filter) h(x, y)
Laplacian Filter results Laplacian filter Original image Laplacian filtered image
High Frequency Emphasis Filter BHPF f(x, y) Histogram equalization
Band Reject Filter (BRF) Ideal BRF Butterworth BRF Gaussian BRF
BRF results DFT f(x, y) F(u, v) Inverse DFT F(u, v)H(u, v) g(x, y) H(u, v)
Band Pass Filter (BPF) DFT F(u, v) f(x, y) Inverse DFT F(u, v)H(u, v) g(x, y) H(u, v)
Inverse Filter Problems l Ideal (theory assumption) l Based on assumption of no noise l Practical l Input image may contain noise l l Effect of the degradation function at the points where the function is close or equal to zero l l l Resulted in failing to estimate the good quality image back Divide by zero or small values Enhance the part of noise and unwanted high frequency Solution l Control passing low frequency using LPF to reduce the effect of noise and division of zero
Inverse Filter results (Blur using Atmospheric Turbulence) Full filter Blured image Turbulance (k=0. 0025)
Wiener Filter (MMSE filter) l Using Minimum Mean Square Error l Sometimes called least square filter Wiener filter Blured image Turbulance (k=0. 0025) Wiener filter result
Filter results from Motion Blur and Gaussian Noise Noisy image Inverse filter results Wiener filter results