Human and Automation Integration Considerations for UAV Systems












 Concept")






 l l Allocation/ Level of Autonomy Bandwidth/")
 Awareness n n n l n Strategic Planning/")













")
")




 Functionality Overview")


")





- Slides: 54
Human and Automation Integration Considerations for UAV Systems Prof. R. John Hansman Roland Weibel MIT International Center for Air Transportation Department of Aeronautics & Astronautics
Possible Commercial UAV Applications - Motivation l Remote Sensing n n n l Surveillance n n l Border Patrol Homeland Security/ Law Enforcement Traffic Monitoring Search and Rescue Data Delivery n n l Meteorology Scientific Research Aerial Photography/ Mapping Pipeline Spotting Disaster Monitoring Agriculture Communications Relay Multimedia Broadcast Cargo Transport
Possible Military UAV Missions - Motivation l Intelligence n n n l Offensive Operation n l Reconnaissance Target Monitoring Forward Air Control Electronic Warfare Search and Rescue Battle Damage Assessment (BDA) Suppression of Enemy Air Defenses (SEAD) Close Air Support Deep Strike Cargo Transport
Current Unmanned Aerial Vehicles
Ceiling
Takeoff Method Hand-launched: Aerovironment Pointer Rocket-Assisted: Hunter UAV Rail-Launched: Sperwar Tilt-Rotor: Eagle Eye Runway Takeoff: X-45 UCAV
Basic Supervisory Control Architecture
UAV Operation Basic Functional Architecture
Pointer UAV n Used for Short-Range Surveillance n n n Vehicle Capabilities n n n Battlefield commanders Law Enforcement Manual Control Autopilo Sensor Integration and Display Loss of Link Return to Base Bandwidth Requirements n n Transmission of Vehicle Commands Receipt of Sensor Intelligence, Vehicle State
Pointer UAV Tasking & Control
Conventional HAE UAV (Tier II Plus) Concept
Global Hawk Mission Control Elements
Global Hawk MCE
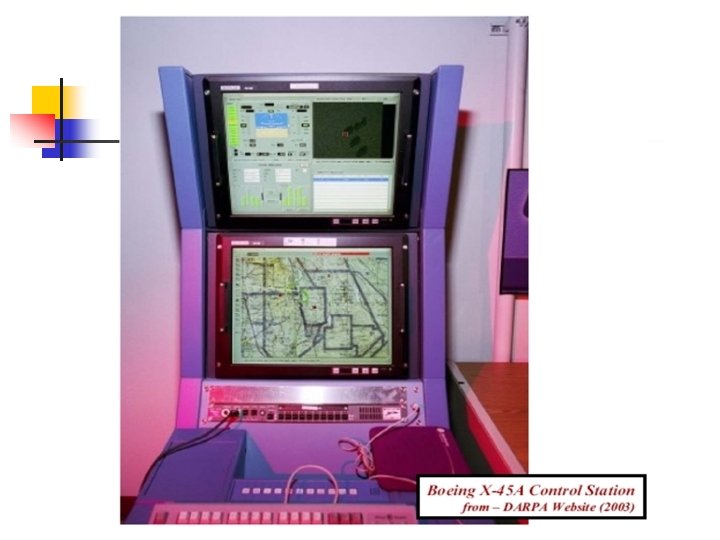
Boeing X-45 UCAV
X-45 A Block 1 Flight Demo Summary Completed 28 Feb 03 n Air Vehicle 1 n n Air Vehicle 2 n n Total number of flights: 14 Total Flight Time: 11. 6 hours Envelope expansion, 4 D Nav, loss-of-comm and C 2 demos Total number of flights: 2 Total AV 2 Flight Time: 1. 2 hours 48 of 48 ground and flight demonstrations complete Currently conducting check-out flight/ground tests for Block 2 demonstrations
X-47 Pegasus Flight Summary Conducted 23 Feb 03 l X-47 First Flight n n n Flight Time: 12 minutes Simulated a tailhook arrestment point on a carrier flight desk by landing near a predesignated touchdown point Utilized shipboard-relative global positioning satellite (SRGPS) system as the primary navigation source for increased landing precision
Surveillance Operational System
UAV-Related Human Factors Issues - (Partial List) l l Allocation/ Level of Autonomy Bandwidth/ Latency Situation Awareness Cognitive Complexity Limitations n l l l Single & Multiple UAVs Information Saturation/ Boredom Simulator Sickness Operator Orientation Confusion Culture Resistance Judgment n n Acceptable Risk Weapons Release Authorization
UAV Task Analysis l Situation (Battlespace) Awareness n n n l n Strategic Planning/ Re-planning n n Goal Management Route planning Tactical Decisions n n n Weapons Authorization Avoidance of Hazards Systems Management n n n l Navigation Aircraft Configuration Sensor Operation Monitoring Environment Threat Targets n l Control n Perception Comprehension Projection Diagnosis n l l Vehicle Health External Environment Risk Assessment Communications Link Sensor Data Communication n n Current State Intent Intelligence Tasking
AFRL Levels of Autonomy 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Remotely Guided Real Time Health Diagnosis Adapt to Failures & Flight Conditions Onboard Route Replan Group Coordination Group Tactical Replan Group Tactical Goals Distributed Control Group Strategic Goals Fully Autonomous Swarms
Level of Autonomy Trend
Intelligent System Capability Development
UAV Design Space - Military
Diagnosis Procedure Role
Endsley Situation Awareness Model
Bandwidth Limits
Bandwidth Limit l Video n l Imagery n l Voice n l l ATC Comm, Comm to Ground Manual Control Commands n Waypoint/ Tasking Commands ATC Comm, Intelligence Schematic Data n l Reconnaissance, Target Selection Voice n l Forward View, Surveillance System Health, Location
Task Performance & Bandwidth
Communications Latency Problems
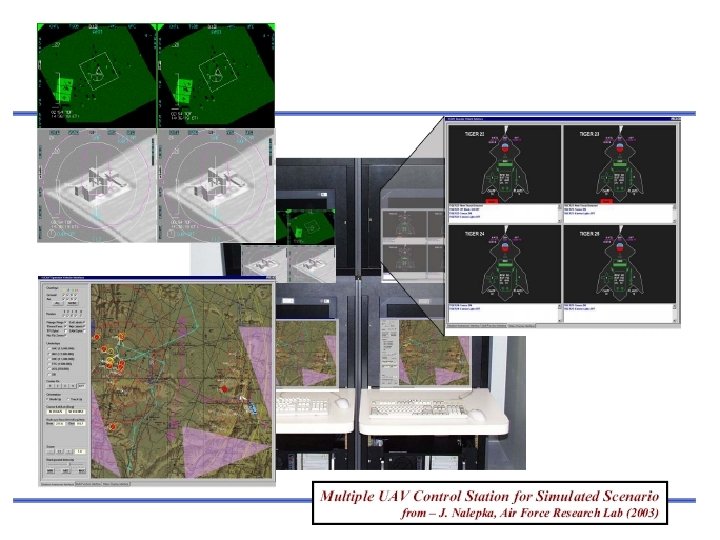
Multiple Vehicle Control l Situation Awareness n n n l Human/ Machine Allocation n n l “Big Picture” Overview of Battlefield Orientation Confusion Multiple Reference Frames N Vehicle status Kindergarten Model Level of Vehicle Autonomy Need for Higher Level of Abstraction (Macro vs Micro Management) Organizational vs Operator Model Directed vs Behavioral Automation Dynamic re-allocation Cognitive Workload – Taskload n n n How many vehicles can be reliably managed Cognitive Complexity Limitations ATC Analogy (Acceptable Level of Traffic)
Complexity Concepts & Controller Process Model
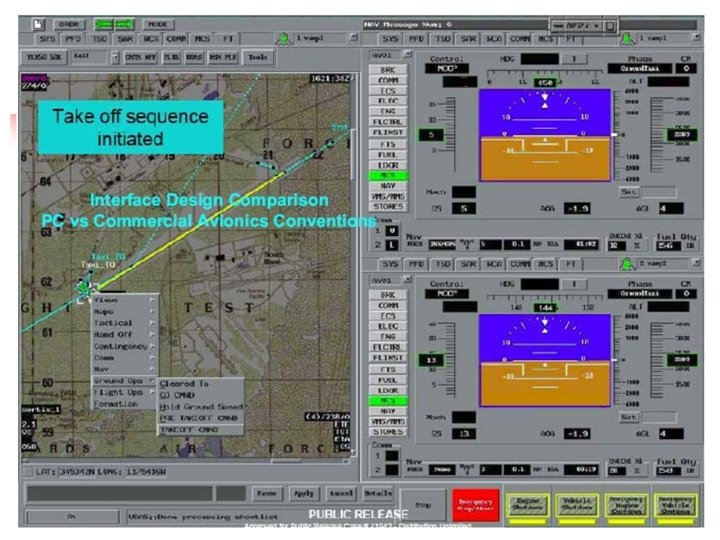
Human-System Interface Issues l Interface Comparison - UAV vs Commercial n n l DARPA USAF Boeing X-45 Example Boeing B-777 Source: Build 2 Operational Simulation Overview Briefing n Caveats: n n n Prototype not operational system Briefing may not reflect actual system PC based interface
X-45 Primary Flight Display (PFD)
Commercial B-777 Primary Flight Display (PFD)
Quiet Dark Philosophy n n n Reduction of Clutter No indications for “normal” No “ON” indicators No indications for “do nothing” Indicate limits, not normal range
Example: Flight Automation n Mode Awareness is becoming a serious issues in Complex Automation Systems n n Multiple accidents and incidents n n automation executes an unexpected action (commission), or fails to execute an action (omission) that is anticipated or expected by one or more of the pilots Strasbourg A 320 crash: incorrect vertical mode selection Orly A 310 violent pitchup: flap overspeed B 757 speed violations: early leveloff conditions Pilot needs to n n n Identify current state of automation Understand implications of current state Predict future states of automation
Type of Intelligent Systems Coaches try to make you better at what you do Associates automatically help with tasks Associates do what you ask them to do Experts do what they know how to do
Decision Aiding System (DAS) Functionality Overview
Decision Aiding Notional Software Architecture
Knowledge Engineering Process
Domain Ontology (Knowledge Categories)
Relational Database Organizes Domain Ontology
Plan-Goal Graphs Describe System Purpose
Concept Graphs Describe the Situation
Task Network Node Type Task Network Similar to Management PERT Chart l l Represents computer tasks (1– 100 mseconds) Represents computer tasks (1– 60 mseconds) Network Topology represent task dependencies Task parameters include task importance and deadline
Monitors Link the Concept Graph and PGG