http nearfieldcommunication org http nfcforum org https el





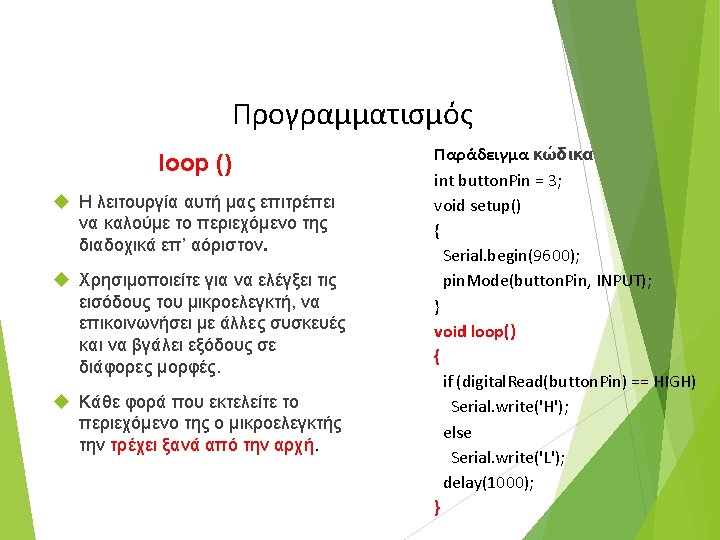
 { Serial. begin(9600); } void")
 { pin. Mode(led,")

 ● υλοποιεί PWM αναθέτοντας το value")


- Slides: 23
Πηγές • http: //nearfieldcommunication. org/ • http: //nfc-forum. org/ • https: //el. wikipedia. org/wiki/NFC
Make. Block - m. Bot
Τύποι Arduino
Arduino MEGA 2560
Επικοινωνία με τον υπολογιστή μέσω USB Κώδικας void setup() { Serial. begin(9600); } void loop() { Serial. println(“Hello World!”); delay(1000); } Serial Monitor
L. E. D. Blink Κώδικας int led = 13; void setup() { pin. Mode(led, OUTPUT); } void loop() { digital. Write(led, HIGH); delay(1000); digital. Write(led, LOW); delay(1000); } 1 KΩ
Aναλογική ανάγνωση Ποτενσιόμετρου Signal GND Κώδικας VCC int pot. Pin = A 0; int value; void setup() { Serial. begin(9600); } void loop() { value = analog. Read(pot. Pin); Serial. println(value); delay(10); }
PWM = Pulse Width Modulation analog. Write(pin-name, value) ● υλοποιεί PWM αναθέτοντας το value στο dutycycle της παλμοσειράς. ● το value παίρνει τιμές 0 -255 (8 bit).
Έλεγχος φωτεινότητας Led μέσω Ποτενσιόμετρου με χρήση PWM int led. Pin = 13; Κώδικας int pot. Pin = A 0; int brightness; // 0 -255 (8 bit) int value; // 0 -1023 (10 bit) void setup(){ pin. Mode(led. Pin, OUTPUT); Serial. begin(9600); } void loop(){ value = analog. Read(pot. Pin); brightness = map(value, 0, 1023, 0, 255); analog. Write(led. Pin, brightness); Serial. println(value); }
Έλεγχος κινητήρα Servo Καφέ Κόκκινο Πορτοκαλί Κώδικας #include <Servo. h> Servo myservo; int servo. Pin = 9; int pos = 0; // 0 -180 degrees void setup() { myservo. attach(servo. Pin); } void loop() { for (pos = 0; pos <= 180; pos++){ myservo. write(pos); delay(15); } for (pos = 180; pos >= 0; pos--) { myservo. write(pos); delay(15); } }