Homotopic Morphing of Planar Curves Nadav Dym Anna



![Guaranteed morphing: Global intersection prevention [Iben et al. 2009], [Gotsman and Surazhsky 2001] [Iben](https://slidetodoc.com/presentation_image_h/12eb8a2d96ecc42269d43b34ffcc7de4/image-4.jpg "Guaranteed morphing: Global intersection prevention [Iben et al. 2009], [Gotsman and Surazhsky 2001] [Iben")
 angle-length ours")
![Same guarantees-different problem Robust Fairing [Crane et al. 2013]: Regular homotopic fairing](https://slidetodoc.com/presentation_image_h/12eb8a2d96ecc42269d43b34ffcc7de4/image-6.jpg "Same guarantees-different problem Robust Fairing [Crane et al. 2013]: Regular homotopic fairing")




 Regular homotopy")

: • Convex representation")






![Angle-length method [Sederberg et al. 1993] •](https://slidetodoc.com/presentation_image_h/12eb8a2d96ecc42269d43b34ffcc7de4/image-23.jpg "Angle-length method [Sederberg et al. 1993] •")
![Angle-length method [Sederberg et al. 1993] • • Convex problem](https://slidetodoc.com/presentation_image_h/12eb8a2d96ecc42269d43b34ffcc7de4/image-24.jpg "Angle-length method [Sederberg et al. 1993] • • Convex problem")




")












")




- Slides: 50
Homotopic Morphing of Planar Curves Nadav Dym, Anna Shtengel and Yaron Lipman Weizmann Institute of Science
Morphing of planar curves
This is how it looks
Guaranteed morphing: Global intersection prevention [Iben et al. 2009], [Gotsman and Surazhsky 2001] [Iben et al. 2009]
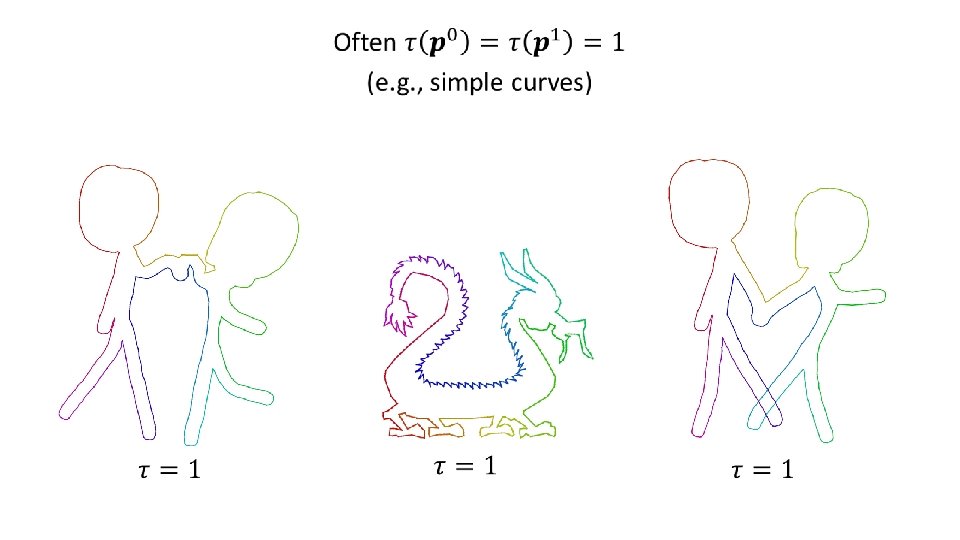
Our Goal: Local intersection prevention (Regular homotopy) angle-length ours
Same guarantees-different problem Robust Fairing [Crane et al. 2013]: Regular homotopic fairing
Regular polygons
Regular homotopy: Definition non-regular
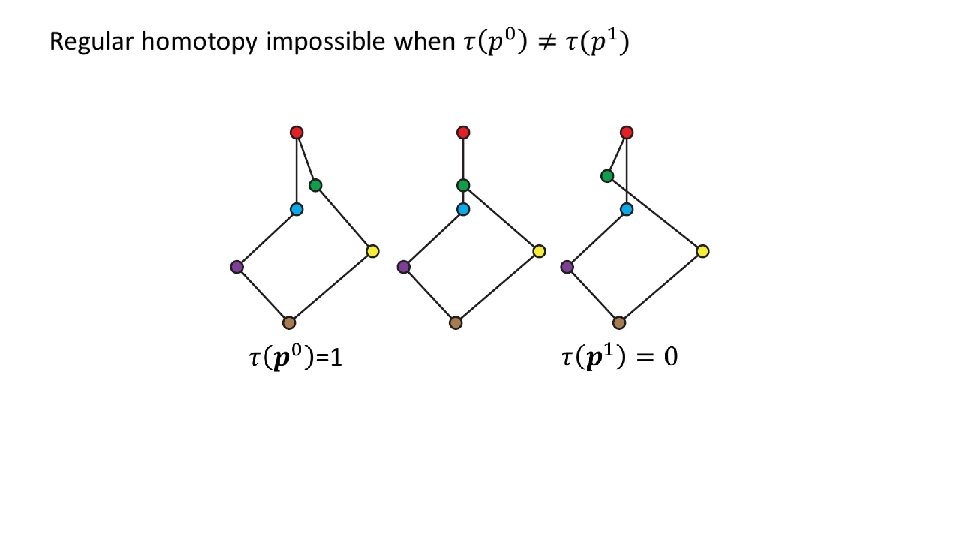
Is regular homotopy always possible? non-regular homotopy Is regular homotopy possible for the example above?
Turning number: The angle accumulated by the tangent field when traversing the curve
Theorem (Whitney-Graustein) Regular homotopy
Our Goal: Regular Homotopic Morphing No local intersections, degenerate edges Aesthetic animation
Main result Guaranteed regular homotopic morphing. Obtained by (more details later): • Convex representation of the space of regular curves • Choosing optimal regular curve with respect to fitting energy
Method
Intrinsic coordinates •
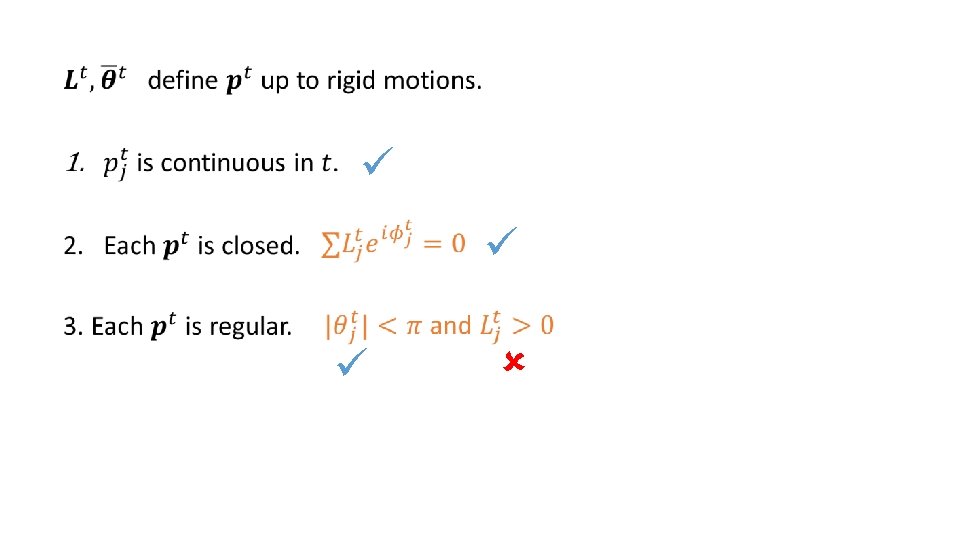
Reconstruction from intrinsic coordinates •
Curve reconstruction • … Terms we met earlier, in these coordinates:
Closing condition •
Regular polygonal curves
Angle-length method [Sederberg et al. 1993] •
Angle-length method [Sederberg et al. 1993] • • Convex problem
Our method
Feasibility theorem
Choosing an energy • Relative error Length element
Dealing with the open constraint
Optimization • Second order cone programming. • Available solvers (e. g. , Mosek)
Well defined, continuous • Smooth vertex path
Mission accomplished •
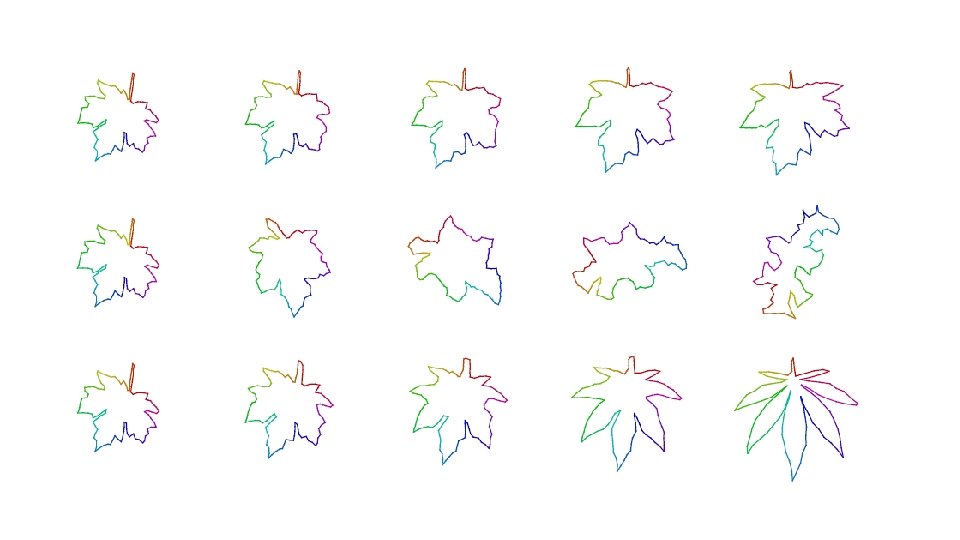
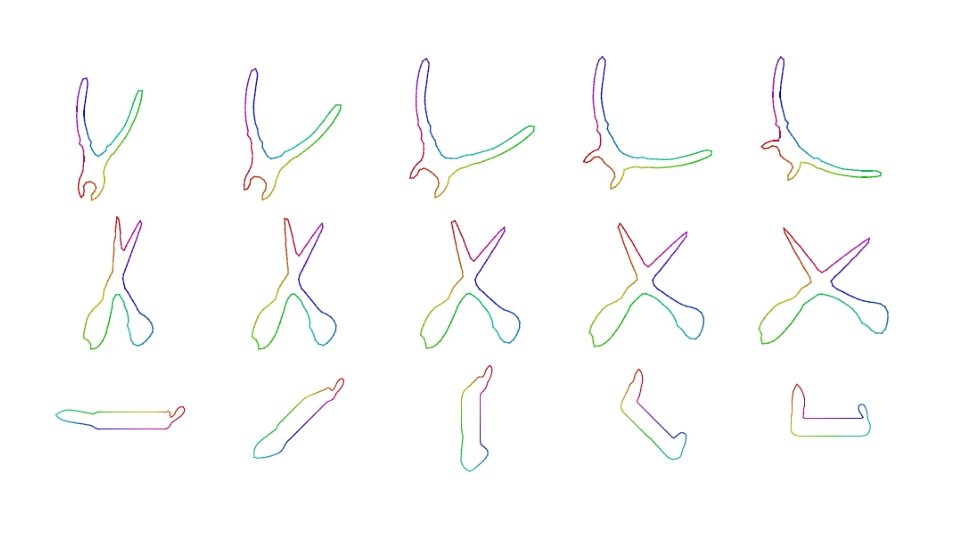
Summary: Main result • We showed how an optimal regular homotopy can be found by convex optimization over the space of regular curves. • Let’s see some examples:
Comparison with angle-length ours
angle-length ours
ours angle-length
Additional results: Briefly
Convex morphing angle-length ours
Morphing piecewise smooth curves • Special cases: Polygons, smooth curves • For smooth curves: Modification of curvature interpolation methods [Surazhsky and Elber 2002], [Saba et al. 2014]
Partial extension to polygon mesh morphing
Homotopic morphing of b-spline curves • Can we homotopically morph b-spline curves by morphing their control polygons? • Not always. • We give an easily checkable sufficient condition.
Curves with different turning number •
Problem: Flips always occur at first vertex! (for angle-length also)
Results for unmodified algorithm
Solution: Automatic selection of “correct” flipping location.
Results with automatic flip location
THE END