Hamster Manual from roboid controller hamster import while

Hamster Manual 정보통신과 이우형

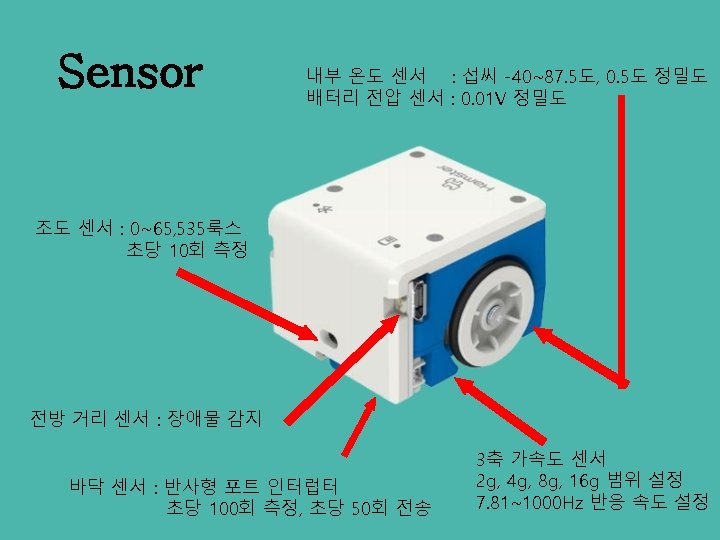

온도 센서 예제 소스 from roboid. controller. hamster import * while True: a = temperature() print a
 while True:")
바닥 센서 예제 소스 from roboid. hamster import * hamster = Hamster() while True: a = hamster. read(Hamster. LEFT_FLOOR) print a Tip! 밝을수록 0 어두울수록 100
 while True:")
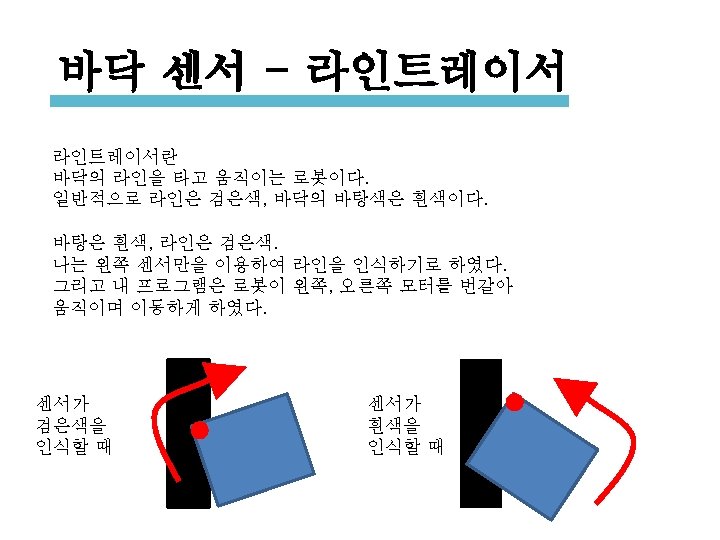
바닥 센서 - 라인트레이서 from roboid. hamster import * hamster = Hamster() while True: a = hamster. read(Hamster. LEFT_FLOOR) if a < 50: hamster. write(Hamster. LEFT_WHEEL, 30) hamster. write(Hamster. RIGHT_WHEEL, 0) else: hamster. write(Hamster. RIGHT_WHEEL, 30) hamster. write(Hamster. LEFT_WHEEL, 0) 시연 영상
 while True:")
전방 거리 센서 예제 소스 from roboid. hamster import* hamster = Hamster() while True: a = hamster. read(Hamster. LEFT_PROXIMITY) print a Tip! 가까워질수록 높은 숫자
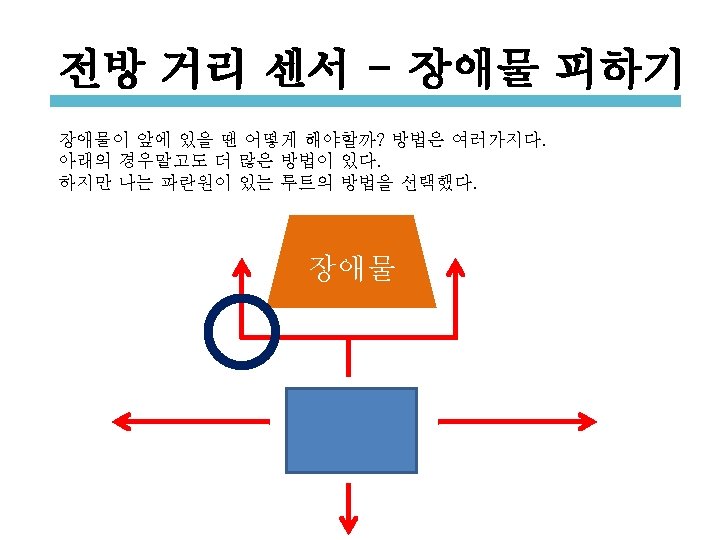

전방 거리 센서 - 장애물 피하기 소스가 조금 길어져서 함수를 만들어 사용하였다. from roboid. hamster import * hamster = Hamster() def go(): hamster. write(Hamster. LEFT_WHEEL, 30) hamster. write(Hamster. RIGHT_WHEEL, 30) def turn(a): if a == 1: hamster. write(Hamster. LEFT_WHEEL, -30) while True: a = hamster. read(Hamster. LEFT_PROXIMITY) hamster. write(Hamster. RIGHT_WHEEL, 30) wait(910) if a > 60: hamster. write(Hamster. LEFT_WHEEL, 0) 시연 영상 turn(1) hamster. write(Hamster. RIGHT_WHEEL, 0) go() else: wait(1500) hamster. write(Hamster. LEFT_WHEEL, 30) turn(0) hamster. write(Hamster. RIGHT_WHEEL, -30) else: wait(910) go() hamster. write(Hamster. LEFT_WHEEL, 0) hamster. write(Hamster. RIGHT_WHEEL, 0)
- Slides: 15