Grafika Komputer Transformasi 3 Dimensi Disampaikan oleh Edy




 digeserke titik Q(4, 5, 1)")


. Rotasi")


 akan ditransformasikan berturut-turut sebagai")

 dan titik")
 akan ditransformasikan berturut-turut sebagai berikut: –")


- Slides: 17
Grafika Komputer Transformasi 3 Dimensi Disampaikan oleh: Edy Santoso, S. Si. , M. Kom
Transformasi 3 D Hampir sama dengan transformasi 2 D, namun dengan memperhitungkan sumbu z. n Bentuk dasar: n – Translasi – Penskalaan – Rotasi
Titik hasil transformasi n Biasa disebut affine transformation: Q = P*M + Tr Dimana: – Q = (Qx, Qy, Qz) menyatakan matriks 1 x 3 yang berisi hasil transformasi. – P = (Px, Py, Pz) menyatakan matriks 1 x 3 yang berisi titik yang akan ditransformasi. – Tr = (Trx, Try, Trz) menyatakan matriks 1 x 3 yang berisi banyaknya pergeseran pada sumbu x, y, dan z. – M = Matriks transformasi berukuran 3 x 3:
Translasi n n n Dilakukan dengan matriks: Contoh: diketahui sebuah titik P = (2, 3, 1) dan titik digeser sejauh tr=(2, 2, 0). Hitung lokasi hasil translasi. Jawab: Q = P*M + Tr
Translasi…lanjut n Maka titik P(2, 3, 1) digeserke titik Q(4, 5, 1)
Penskalaan n Penskalaan dilakukan dengan mengisi rumus Q = P*M + Tr, dengan Tr = (0, 0, 0) dan matriks :
Penskalaan…lanjut n Pengaruh nilai Sx, Sy, dan Sz terhadap hasil peskalaan: Nilai (Sx, Sy, Sz) > 1 (Sx, Sy, Sz) < -1 Keterangan Pembesaran dengan pencerminan -1 > (Sx, Sy, Sz) < 1 Pengecilan dengan /tanpa pencerminan
Rotasi n Berbeda dengan rotasi 2 D, yang menggunakan titik pusat (0, 0). Rotasi 3 dimensi terdapat 3 macam yang bisa dilakukan: – Rotasi terhadap sumbu x. – Rotasi terhadap sumbu y. – Rotasi terhadap sumbu z.
Rotasi n Matriks rotasi M:
Transformasi Homogen n Bentuk umum matriks homogeneus tranformation: Q = P*M M = MT 1 * MT 2 * MT 3 * MT 4 * …* MTm – Dimana P merupakan matriks P = [Px Py Pz 1]
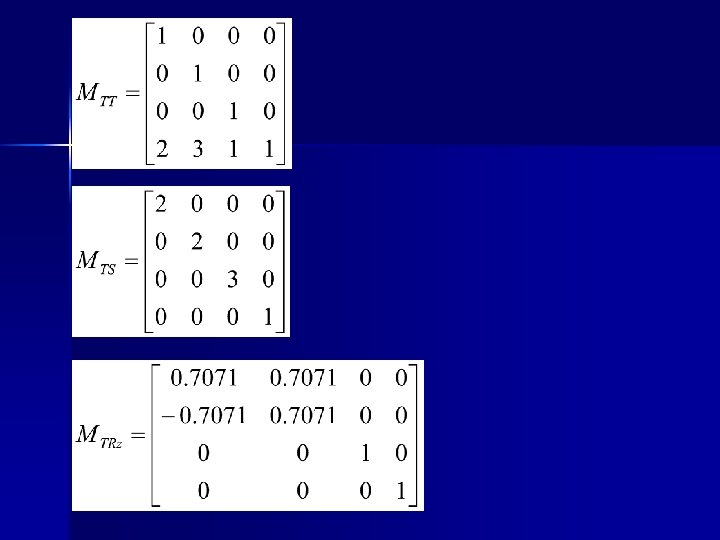
Transformasi Homogen Contoh: n Titik A = (2, 2, 1) akan ditransformasikan berturut-turut sebagai berikut: – Translasi (2, 3, 1) – Skala (2, 2, 3) – Rotasi pada sumbu z sebesar 10 o Hitung lokasi titik setelah ditransformasikan. Jawab:
Maka:
Latihan 1. 2. 3. Diketahui sebuah titik P = (4, -3, 2) dan titik digeser sejauh tr=(-2, 5, 1). Hitung lokasi hasil translasi! Dari hasil translasi soal 1 lakukan rotasi sebesar 45 o terhadap sumbu z! Titik A = (2, 1, 4) akan ditransformasikan berturut-turut sebagai berikut: – Skala (2, 4, 2) – Translasi (1, 3, 2) – Rotasi pada sumbu x sebesar 30 o Hitung lokasi titik setelah ditransformasikan.
Latihan 1. Titik A = (4, 3, 4) akan ditransformasikan berturut-turut sebagai berikut: – Translasi (4, 2, 5) – Rotasi pada sumbu y sebesar 60 o Hitung lokasi titik setelah ditransformasikan.
Implementasi Salah satu contoh implementasi: n Transformasi 3 dimensi n
Tugas 4 Buat objek tiga dimensi dan transformasinya beserta pewarnaannya. n Kelompok 2 orang n Waktu pengumpulan Setelah UTS n