Geometry and Algebra of Projective Views Cho Hang

Geometry and Algebra of Projective Views Cho, Hang Shin Computer Graphics Lab. Korea University
 2 D Image (x, y, z) 3 D Geometry")
In Vision. . (x, y) 2 D Image (x, y, z) 3 D Geometry
 P (x, y) P 0")
In Graphics… Projection U (X, Y, Z) P (x, y) P 0
 P 0 U 1")
But, Inverse is Very Ambiguous! U 0 P (x, y) P 0 U 1 U 2 (X, Y, ? . . .

Using Two View Points. . Epipolar Constraints as the basic Geometry of the Vision Techniques. . .

Contents • • Vector Space Linear combination Affine Space Homogeneous Coordinates Matrices Determinants Solving linear Equations
 • • Duality Linear Transformation Projection Equation Camera Calibration in terms of Geometric")
Content(Cont’d) • • Duality Linear Transformation Projection Equation Camera Calibration in terms of Geometric View • Epipolar Geometry

Part I Vectors and Matrices In Computer Graphics

Points and Vectors • Point : 좌표계의 한 점을 차지 , 위치표시 • Vector : 두 position간의 차로 정의 – Magnitude와 Direction으로 표기 P 2 y 1 V P 1 x 2
 • 3 -Dimensional Vector z x • Vector Addition and Scalar Multiplication")
Vectors (Cont’d) • 3 -Dimensional Vector z x • Vector Addition and Scalar Multiplication V y

Scalar Product S Dot Product, Inner Product라고도 함 V 2 |V 2|cos V 1 For Cartesian reference frame, Some Properties Commutative Distributive

Vector Product V 1 V 2 V 1 Properties Anti. Commutative Not Assotiative Distributive ※ ux, uy, uz를 각 축의 단위 vector라 하면,

Vector Spaces • A nonempty set V of vectors • Addition + Scalar Multiplication · · · u+v = v+u V u+0 = u cu V , (c is scalar) c(u+v) = cu+cv c(du) = (cd)u · (u+v)+w = u+(v+w) · u+(-u) = 0 · (c+d)u = cu+du · 1 u = u
 Single Vector의 linear combination v")
Linear Combination • Consist of scalar and vectors Ex) Single Vector의 linear combination v v v : real number : nonnegative
 Span{v 1, v")
Span • Span Vector set의 모든 가능한 linear combination을 지칭 Ex) Span{v 1, v 2} v 1 + v 2 v 1 v 2 두 Vector의 linear combination

Linearly Independence A set of vectors B={v 1, …, vp} in V is said to be linearly independent if the vector equation has only the trivial solution c 1=0, …, cp=0. (3, 1) (6, 2) u w v Linearly dependent, w in Span{u, v} Linearly dependent, Collinear (3, 2) w (6, 2) u Linearly independent, Not collinear v Linearly independent, w not in Span{u, v}

Basis 어떤 linearly independent vector set B에 의해 vector space H가 span될 때, 이 vector set B를 H 의 basis 라 한다. H = Span{b 1, … , bp} z u 3 u 1 u 2 y x The standard basis for R 3

Orthogonal Basis Orthogonal basis - 각 원소 vector들이 서로 직교 할 때 - for all k for all j k - z u 3 u 1 u 2 y x Orthonormal basis ※ Orthonormal basis 각 원소 vector들이 서로 직교 하면서 동시에 단위 vector로 이루어져 있을 때

Affine Space • • The Extension of the Vector Space Geometric operation들이 의미를 갖는 공간 Vector Space의 0 같은 일정 기준점이 없다. Points와 그에 종속된 vector들로 표현 P Truncated plane (No Origin) : Vector Space P 기준의 새 좌표계 설정 : Affine Space

Affine Combination • Linear combination of points in an affine space make no sense • Parametric Representation 사용 P , t is real number Q P R Q

Parametric Representations • Defects in Nonparametric representation – Explicit function의 경우 1. Can only represent infinite lines, not finite line segments 2. Cannot represent vertical lines(m= ) 3. Can only 2 D lines, not 3 D – Implicit function의 경우 원하는 것 이상의 표현을 포함 Ex) 원호의 표현 : y x
 Circle")
Parametric Representations – x, y, z좌표를 직접 쓰는 대신 parameter u를 사용 Ex) Circle Ex) Spherical Surface ※ u는 latitude를, v는 longitude를 나타냄.
 P sy)P")
Matrix Representations and Homogeneous Coordinates • Homogeneous coordinates P’ = T(tx, ty) P sy)P P’ = R( ) P y P’ = S(sx, P(hx 1, hy 1, h) z =3 P(3 x 1, 3 y 1, 3) z =2 z =1 P(x 1, y 1, 1) P(2 x 1, 2 y 1, 2) 3 D Representarion of homogeneous space x

Matrices • Definition – A rectangular array of quantities • Scalar multiplication and Matrix Addition

Matrix Multiplication • Definition j-th column i-th row × l m • Properties Not Commutative Assotiative Distributive Scalar multiplication m = (i, j) l n n
 x y P’ (b) x")
Translation y P (a) x y P’ (b) x

Scaling x’ = x · Sx , y’ = y · Sy x’ y (xf, yf) x’ = xf + (x-xf) sx , y’ = yf + ( y- yf) sy P 1 P 2 P 3 (xf, yf) : fixed point x x
 P’ = R P r x = r cos , y")
Rotation (x’, y’) P’ = R P r x = r cos , y = r sin (x, y) r 죄표중심을 회전점으로 각 만큼 회전 x’ = r cos ( + ) = r cos - r sin y’ = r sin ( + ) = r cos sin + r sin cos x’= x cos - y sin , y’ = x sin + y cos

Determinant of a Matrix • For n 2, the Determinant of n n matrix A is, and for a 2 by 2 matrix, Ex) ※ if A is a triangular matrix, det A is the product of the entries on the main diagonal of A
")
Properties of Determinants • Row Operations Let A, B be a square matrix 1) A의 한 행의 실수배가 다른 row에 더해져 B를 만들었다면, det. B = det. A 2) A의 두 행이 교환되어 B를 생성했다면, det. B = -det. A 3) A의 한 행이 k배된 것이 B라면, det. B = k det. A Ex) • Column Operations

Solving Linear Equation • Linear Equation where, ajk and bj are known • Using Matrix Equation ※Coefficient Matrix A의 역행렬이 존재할 때만 성립

Inverse Matrix • Definition • Properties • 2 2 matrix의 경우 If ad-bc = 0, then A is not invertible.
![Inverse Matrix • Algorithm for Finding A-1 : Row reduction [ I A-1] 형태의](http://slidetodoc.com/presentation_image/5326cd0a07649d4242ca4259aeeace41/image-33.jpg "Inverse Matrix • Algorithm for Finding A-1 : Row reduction [ I A-1] 형태의")
Inverse Matrix • Algorithm for Finding A-1 : Row reduction [ I A-1] 형태의 row reduction이 존재하지 않으면, A is not invertible. Ex)
 be the")
Cramer’s Rule For invertible n n matrix A and b, let Ai(b) be the matrix obtained from A by replacing column i by the vector b, x of Ax=b is, column i Ex) det. A=2

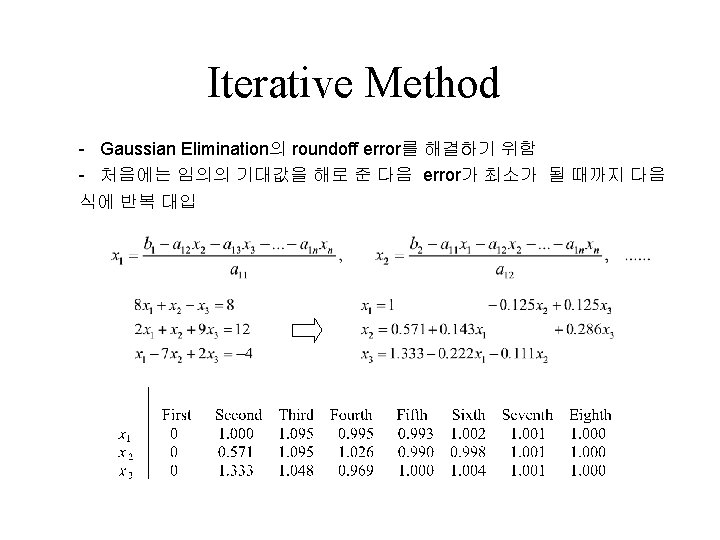
Gaussian Elimination System에서 한 행의 실수배를 다른 행에서 빼어 연립방정식의 차수를 줄여나가다, 한 변수의 해가 구해지면, 역으로 대입해 나 머지 변수값을 구한다. • Elementary Row Operation 1. Multiply any row of the augmented matrix by a nonzero constant 2. Add a multiple of one row to a multiple of any other row 3. Interchange the order of any two rows

Using Row Operations

Consistency of Linear System 1. Unknown variable의 수에 비해 equation의 수가 적을 때 No Unique solution (Infinite set of solution) 2. Unknown variable의 수에 비해 equation의 수가 많을 때 1) Consistent한 경우 : 구한 해가 남은 방정식에 대해서도 성립(redundant) 2) Inconsistent한 경우 (infinity) (no solution)

Singular Matrix • n n system이 unique solution을 갖지 않을 때 , 그 system 의 coefficient matrix를 singular하다고 한다. • 일반적으로 coefficient matrix를 triangulization했을 때, diagonal에 0이 있으면 singular하다. ( No solution, Inconsistent ) ( Infinity, redundant )

Norms • The magnitude of multicomponent entities like matrices and vectors(the measure of “bigness” or “smallness”) • Four properties 1. Must have a value greater than or equal to 0. 2. Must be multiplied by |k| if the matrix is multiplied by the scalar k. 3. The norm of the sum of two matrices must not exceed the sum of the norms 4. The norm of the product of two matrices must not exceed the product of the norms Vector의 p-norm Matrix의 2 -norm
- Slides: 40