Genetic Algorithm and Genetic Programming Crossovers in Nature


? ROBOTICS Machine learning evolutionary GP EP")








 • Slow to converge to optimal solution • More advanced ES")










*(4 - num) * -")
















 Tree-reduction semantics")






")











 Highest fitness")
















 • Neural Networks – Learning requires complete test set")





- Slides: 87
Genetic Algorithm and Genetic Programming
Crossovers in Nature • • • Two parental chromosomes exchange part of their genetic information to create new hybrid combinations (recombinant). No loss of genes, but an exchange of genes between two previous chromosomes. No new genes created, created preexisting old ones mixed together.
What are evolutionary algorithms and Genetic Algorithm (GA)? ROBOTICS Machine learning evolutionary GP EP GA Artificial Intelligence ES Artificial Intelligence
Genetic Algorithms
Genetic Algorithms • 1. Randomly initialize a population of chromosomes. • 2. While the terminating criteria have not been satisfied: – a. Evaluate the fitness of each chromosome: • i. Construct the phenotype (e. g. simulated robot) corresponding to the encoded genotype (chromosome). • ii. Evaluate the phenotype (e. g. measure the simulated robot’s walking abilities), in order to determine its fitness. – b. Remove chromosomes with low fitness. – c. Generate new chromosomes, using certain selection schemes and genetic operators.
Genetic Algorithms 1. Fitness function 2. Selection scheme 3. Genetic operators 1. Crossover 2. Mutation 4. Create bitstrings 5. Evaluate bitstrings (genotype) 6. Transform bitstrings to robot behaviors (phenotype)
Crossover and mutation.
Agenda • • • What is Genetic Programming? Background/History. Why Genetic Programming? How Genetic Principles are Applied. Examples of Genetic Programs. Future of Genetic Programming.
Genetic Algorithms • Most widely used • Robust • uses 2 separate spaces – search space - coded solution (genotype) – solution space - actual solutions (phenotypes) Genotypes must be mapped to phenotypes before the quality or fitness of each solution can be evaluated
Evolutionary Strategies
Evolutionary Strategies • Like GP no distinction between search and solution space • Individuals are represented as real-valued vectors. • Simple ES – one parent and one child – Child solution generated by randomly mutating the problem parameters of the parent. • Susceptible to stagnation at local optima
Evolutionary Strategies (cont’d) • Slow to converge to optimal solution • More advanced ES – have pools of parents and children • Unlike GA and GP, ES have these properties: – ES Separates parent individuals from child individuals – ES Selects its parent solutions deterministically
Evolutionary Programming
Evolutionary Programming • Resembles ES, developed independently • Early versions of EP applied to the evolution of transition table of finite state machines • One population of solutions, reproduction is by mutation only • Like ES operates on the decision variable of the problem directly (ie Genotype = Phenotype) Phenotype • Tournament selection of parents – better fitness more likely a parent – children generated until population doubled in size – everyone evaluated and the half of population with lowest fitness deleted.
General Architecture of Evolutionary Algorithms
Genetic Programming
Genetic Programming • John Koza, 1992 Please review about Behavioral systems, Genetic Algorithms and Genetic Programming from the book. Chapters 20, 21, 22, 23. • Evolve program instead of bitstring • Lisp program structure is best suited – Genetic operators can do simple replacements of subtrees – All generated programs can be treated as legal (no syntax errors)
Genetic Programming • Specialized form of GA • Manipulates a very specific type of solution using modified genetic operators • Original application was to design computer programs • Now applied in alternative areas eg. Analog Circuits • Does not make distinction between search and solution space. • Solution represented in very specific hierarchical manner.
Background/History • By John R. Koza, Stanford University. • 1992, Genetic Programming Treatise - “Genetic Programming. On the Programming of Computers by Means of Natural Selection. ” - Origin of GP. • Combining the idea of machine learning and evolved tree structures.
Why Genetic Programming? • It saves time by freeing the human from having to design complex algorithms. • Not only designing the algorithms but creating ones that give optimal solutions. • Again, Artificial Intelligence.
What Constitutes a Genetic Program? • Starts with "What needs to be done" • Agent figures out "How to do it" • Produces a computer program - “Breeding Programs” • • Fitness Test Code reuse Architecture Design - Hierarchies Produce results that are competitive with human produced results
How are Genetic Principles Applied? • • “Breeding” computer programs. Crossovers. Mutations. Fitness testing.
Computer Programs as Trees • Infix/Postfix • (2 + a)*(4 - num) * - + 2 a 4 num
“Breeding” Computer Programs Hmm heh. Hey butthead. Do computer programs actually score?
“Breeding” Computer Programs • Start off with a large “pool” of random computer programs. • Need a way of coming up with the best solution to the problem using the programs in the “pool” • Based on the definition of the problem and criteria specified in the fitness test, mutations and crossovers are used to come up with new programs which will solve the problem.
The Fitness Test
The Fitness Test • Identifying the way of evaluating how good a given computer program is at solving the problem at hand. • How good can a program cope with its environment. • Can be measured in many ways, i. e. error, distance, time, etc…
Fitness Test Criteria • Time complexity a good criteria. – i. e. n 2 vs. n logn. – “How long to find the solution? ” • Accuracy - Values of variables. – “How good is the solution? ” • Combinations of criteria may also be tested.
Mutations
Mutations in Nature Properties of mutations • Ultimate source of genetic variation. • Radiation, chemicals change genetic information. • Causes new genes to be created. • One chromosome. Before: • Asexual. acgtactggctaa • Very rare. After: acatactggctaa
Genetic Programming • 1. Randomly generate a combinatorial set of computer programs. • 2. Perform the following steps iteratively until a termination criterion is satisfied – a. Execute each program and assign a fitness value to each individual. – b. Create a new population with the following steps: • i. Reproduction: Copy the selected program unchanged to the new population. • ii. Crossover: Create a new program by recombining two selected programs at a random crossover point. • iii. Mutation: Create a new program by randomly changing a selected program. • 3. The best sets of individuals are deemed the optimal solution upon termination
Mutations in Programs • Single parental program is probabilistically selected from the population based on fitness. • Mutation point randomly chosen. – the subtree rooted at that point is deleted, and – a new subtree is grown there using the same random growth process that was used to generate the initial population. • Asexual operations (mutation) are typically performed sparingly: – with a low probability of mutations, – probabilistically selected from the population based on fitness.
Crossovers in Programs
Crossovers in Programs 1. Two parental programs are selected from the population based on fitness. 2. A crossover point is randomly chosen in the first and second parent. 1. 2. The first parent is called receiving The second parent is called contributing 3. The subtree rooted at the crossover point of the first parent is deleted 4. It is replaced by the subtree from the second parent. 5. Crossover is the predominant operation in genetic programming (and genetic algorithm) research 6. It is performed with a high probability (say, 85% to 90%).
Applications of GP in robotics 1. Wall-following robot – Koza – Behaviors of subsumption architecture of Brooks. Evolved a new behavior. 2. Box-moving robot – Mahadevan 3. Evolving behavior primitives and arbitrators – for subsumption architecture 4. Motion planning for hexapod – Fukuda, Hoshino, Levy PSU. 5. Evolving communication agents Iba, Ueda. 6. Mobile robot motion control – Walker. – for object tracking 7. Soccer 8. Car racing Population sizes from 100 to 2000
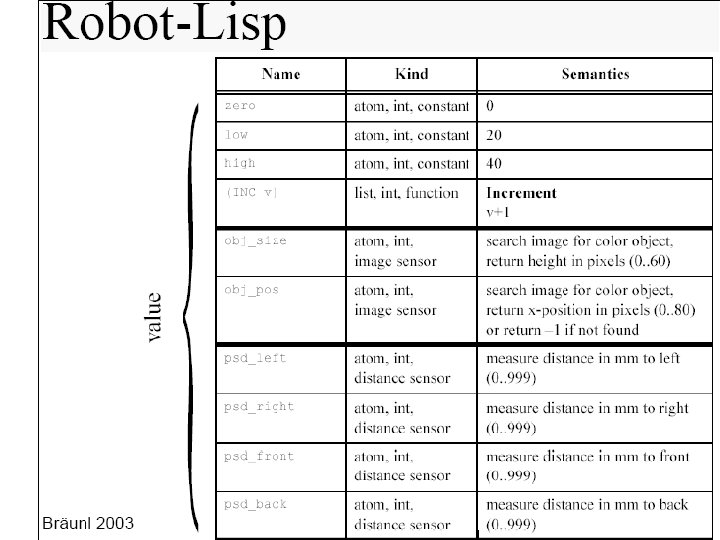
Subset of LISP for Genetic Programming
This is a very small subset of Lisp LISP = Famous first language of Artificial Intelligence and Robotics
• More functions • Atom, list, cons, car, cdr, numberp, arithmetic, relations. Cond. • Copying example
A very important concept – Lisp does not distinguish data and programs
Programs in Lisp are trees that are evaluated (calculated) Tree-reduction semantics
Lisp allows to define special languages in itself
Robot-Lisp cont • This subset of Lisp was defined for a mobile robot • You can define similar subsets for a humanoid robot, robot hand, robot head or robot theatre
As an exercise, you can think about behaviors of all Braitenberg Vehicles described by such programs
• You can define much more sophisticated mutations that are based on constraints and in general on your knowledge and good guesses (heuristics)
1. You can define your own languages in Lisp 2. You can write your own Lisp-like language interpreter in C++ 3. Many on Web
Eye. Sim simulator allows to simulate robots, environments and learning strategies together, with no real robot Evolution here takes feedback from simulated environment (simulated) In our project with teens the feedback is from humans who evaluate the robot theatre performance (subjective) In our previous project with hexapod the feedback was from real measurement in environment (objective)
Evolution principles are the same for all evolutionary algorithms. • Each individual (Lisp program) is executed on the Eye. Sim simulator for a limited number of program steps. • The program performance is rated continually or when finished.
Sample Problem: Ball Tracking
Sample Problem: Ball Tracking GOALS • Find ball in environment • Drive towards it • Stop when close to ball 1. A single robot is placed at a random position and orientation in a rectangular driving area closed by walls. 2. A colored ball is also placed at a random position. Similar other tasks that we solved: • Collect cans • Shoot goal in soccer • Robot sumo • Robot fencing 3. Using its camera, the robot has to detect the ball, drive towards it, and stop close to it. 4. The robot camera is positioned at an angle so the robot can see the wall ahead from any position in the field. 5. However, the ball is not always visible.
Idea for solving • In the loop, grab an image and analyze it as follows: – Convert the image from RGB to HSV (Hue, Saturation and Value) – Use the histogram ball detection routine from section 8. 6 of the book (this returns a ball position in the range [0. . 79] (left. . Right) or no ball and a ball size in pixels [0. . 60]) – If the ball height is 20 pixels or more, then stop and terminate (the robot is close enough to the ball) – Otherwise • If no ball is detected or the ball position is less than 20, turn slowly left. • If the ball position is between 20 and 40, drive slowly straight • If the ball position is greater than 40, turn slowly right.
• • Col. Search returns the x-position of the ball or -1 if not detected and the ball height in pixels. The statement VWDrive. Wait following either VWDrive. Turn or a VWDrive. Straight command suspends execution driving or rotation of the requested distance or angle has finished.
The evolution can start from random data or from good hand-coded solutions from humans Bear in mind that obj_size and obj_pose are in fact calls to the image processing subroutine.
Evolution of tracking behavior • Koza suggests the following steps for setting up a genetic programming system: 1. Establish an objective. 2. Identify the terminals and functions used in the inductive program 3. Establish the selection scheme and its evolutionary operations 4. Finalize the number of fitness cases 5. Determine the fitness function and hence the range of raw fitness values 6. Establish the generation gap G, and the population M 7. Finalize all control parameters. 8. Execute the Genetic Paradigm.
Eye. Sim simulator allows to simulate robots, environments and learning strategies together, with no real robot Evolution here takes feedback from simulated environment (simulated) In our project with teens the feedback is from humans who evaluate the robot theatre performance (subjective) In our previous project with hexapod the feedback was from real measurement in environment (objective)
Summary on GP • • • Field of study in Machine Learning. Created by John Koza in 1992. Save time while creating better programs. Based on the principles of genetics. Used in: – Symbolic Regression – Circuit Design. – Many others
• Example of using Genetic Programming in Robotics • Use of simulation
Robot’s view and driving path in Eye. Sim simulator Robot trajectory
You want to maximize this fitness function
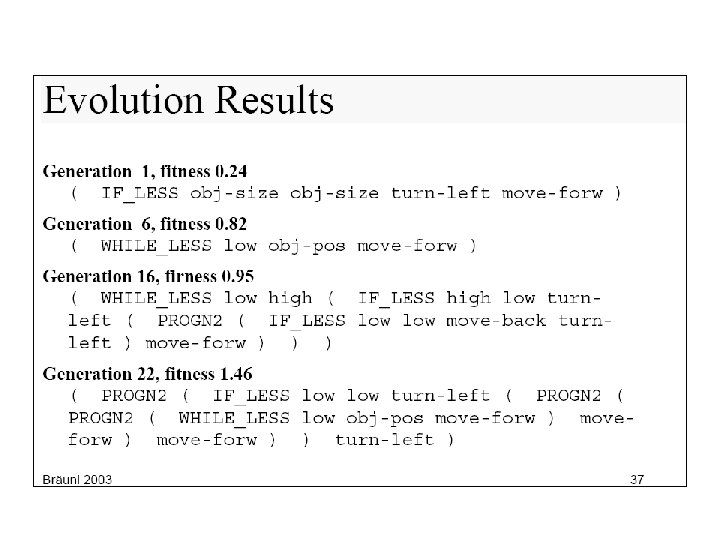
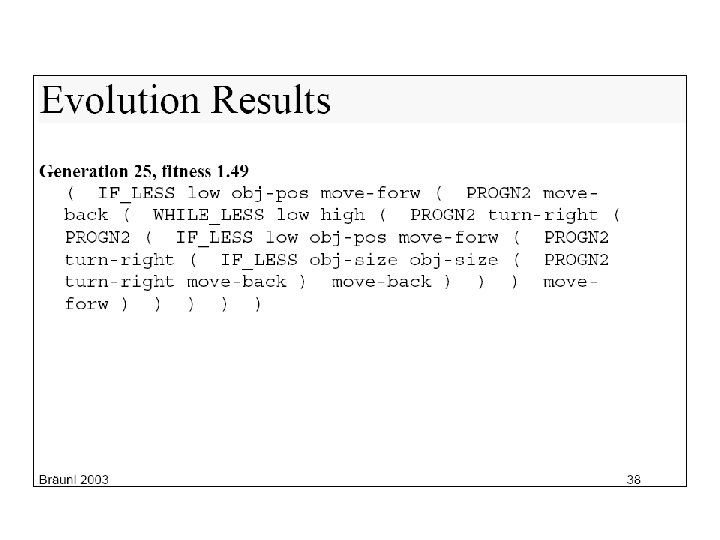
Fitness grows in next populations (in general) Highest fitness
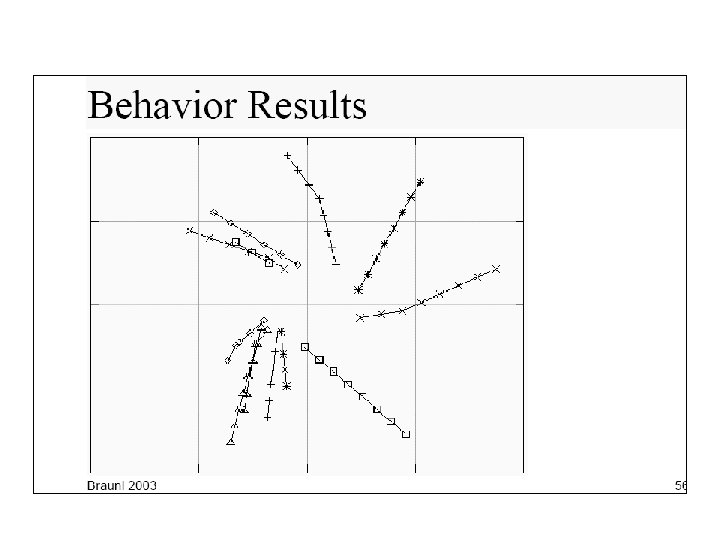
What are the evolved trajectories of the robot to meet the ball? The best trajectory
• • Use of improved GP Use of parallel processing Use of FPGA and evolvable hardware Use of quantum computers in future.
Behavior-Based Systems
Behavior-Based Systems • Rodney Brooks, 1986 – Ronald Arkin, 1998 • Instead of single, monolithic program, use a number of behaviors ( parallel processes) – Improve changeability – Utililize emergence • Each behavior has access to all sensors and actuators • Problem: behavior selection There are now many variants of behavior-based robots. Braitenberg is just one of them.
Good old-fashioned hierarchical software architecture for a robot
Modern behavioral software architecture for a robot
Behavior Selection • Clearly, we cannot have two different behaviors in control of actuators – (e. g. obstacle-avoidance wants to drive left, balldetection wants to drive right) • Solution 1: Always select one behavior as active • Solution 2: Add actuator output of all behaviors, multiplied with certain coefficients
Behavior Selection • Remaining problem: – How to determine which behavior to select or which coefficients to use • Solution: ? ? • How about using GA to evolve a solution!
Behavior Selection Parameters Evolution of controller parameters Direct inputs camera Ball detection Processed sensor input Schema weighting Move to ball Avoid obstacles schemas Schemas using direct and processed inputs Trial result Single chromosome Actuator output
• Many tools of this type are created • In this class the projects are about animatronix editor and state based editor • Another possibility is to use Artificial Neural Network
• This slide shows hierarchical editor for subsumption-type architecture
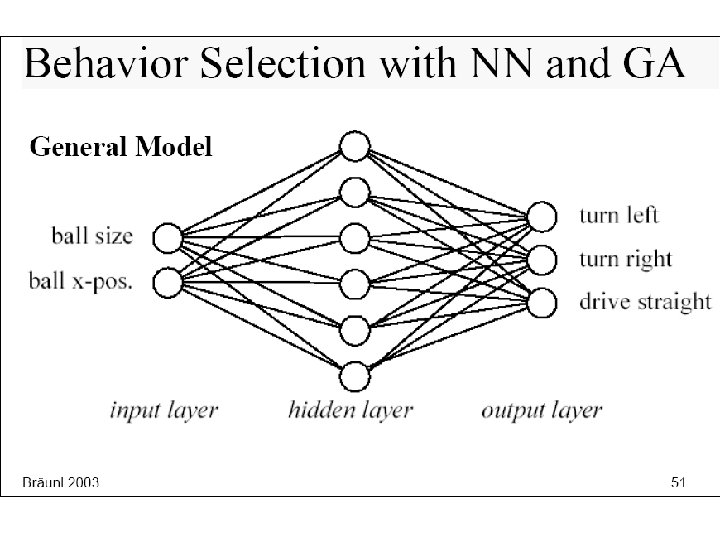
Sample Problem: Ball Tracking • Problem: – Find ball in environment – Drive towards it – [Stop when close to ball] • Behavior selection: – Use NN – Evolve NN weights using GA
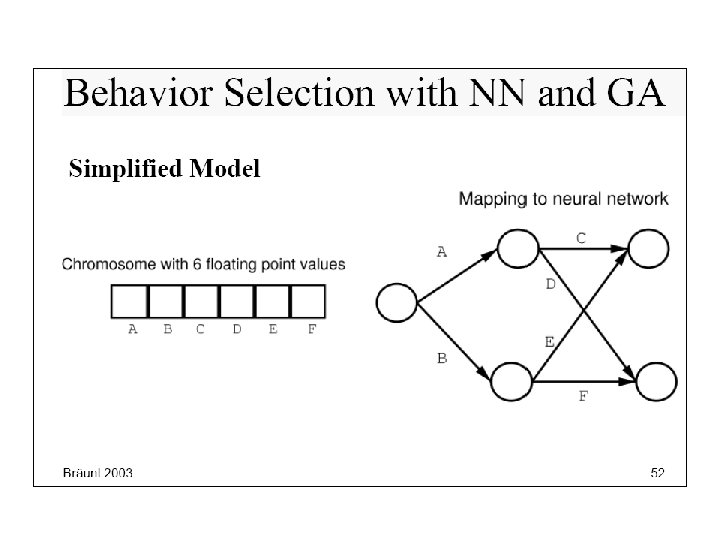
Behavior Selection with NN and GA
Behavior Selection with NN and GA • Fitness function: fitness = init. Dist - b_distance(); if (fitness < 0. 0) fitness = 0. 0;
Both approaches can provide increase in Fitness function. The problem is how good?
Trajectories found by behavioral approaches
AI in robotics (first summary) • Neural Networks – Learning requires complete test set with correct results • Genetic Algorithms – Evolving solutions based on fitness function can be used in real robot or in simulation (often easier/faster) • Genetic Programming – Requires algorithm coding/interpretation (e. g. Lisp) • Behavior-Based Systems – Combining parallel processing approach with intelligent selection scheme
Other areas - Examples of Genetic Programs • 1. Symbolic Regression – the process of discovering: • the functional form of a target function • and all of its necessary coefficients, • or at least an approximation to these. • 2. Analog circuit design – Embryo circuit is an initial circuit which is modified to create a new circuit according to functionality criteria.
Genetic Programming in the Future • • Speculative. Only been around for 10 years. Is very successful. Discovery of new algorithms in existing projects. • Can be combined with constructive induction, LISP-based systems, evolutionary hardware, neural networks, fuzzy logic, quantum logic and many other ideas and methods. Mr. Roboto
End of Show Hey Butthead. That kicked ass. Oh yeah. Hm hm yeah hm. It sucked. Shut up Buttmunch. That sucked.
1. 2. 3. 4. What you can do with these evolutionary ideas? Generation of gaits for a biped robot Generation of hand gestures for a humanoid robot Generation of path for a mobile robot Generation of mouth motions for a speaking robot head 5. Generation of a state machine for a behavioral robot – Braitenberg Vehicles. 6. Generation of arbitrary controller represented as Neural Net, Boolean Function, Fuzzy function or Multiple-Valued Function. 7. Many many other applications in our projects – be creative. 8. You can find many papers by Google – search under Evolutionary Robotics.
Sources • • • Braunl Dan Kiely Ran Shoham Brent Heigold CPSC 533, Artificial Intelligence