Fundamentals of Robotics Ch 3 Kinematics of Robots

机器人学基础 第三章 机器人运动学 Fundamentals of Robotics Ch. 3 Kinematics of Robots 中南大学 蔡自兴,谢 斌 zxcai, xiebin@mail. csu. edu. cn 2010 Fundamentals of Robotics 1

3. 0 Introduction to Robot Kinematics treats motion without regard to the forces that cause it. Within the science of kinematics one studies the position, velocity, acceleration, and all higher order derivatives of the position variables (with respect to time or any other variable). 从几何学的观点来处 理手指位置P与关节变量 L 1, L 2, 和 的关系称为 运动学(Kinematics)。 3. 0 Introduction to Robot Kinematics 2

3. 0 Introduction to Robot Kinematics In manipulator robotics, there are two kinematics tasks: Direct (also forward) kinematics – Given are joint relations (rotations, translations) for the robot arm. Task: What is the orientation and position of the end effector? Inverse kinematics – Given is desired end effector position and orientation. Task: What are the joint rotations and orientations to achieve this? 3. 0 Introduction to Robot Kinematics 3

Example of Direct Kinematics Define position of end effector and the joint variable, The generaltovector form According geometry: 3. 0 Introduction to Robot Kinematics 4

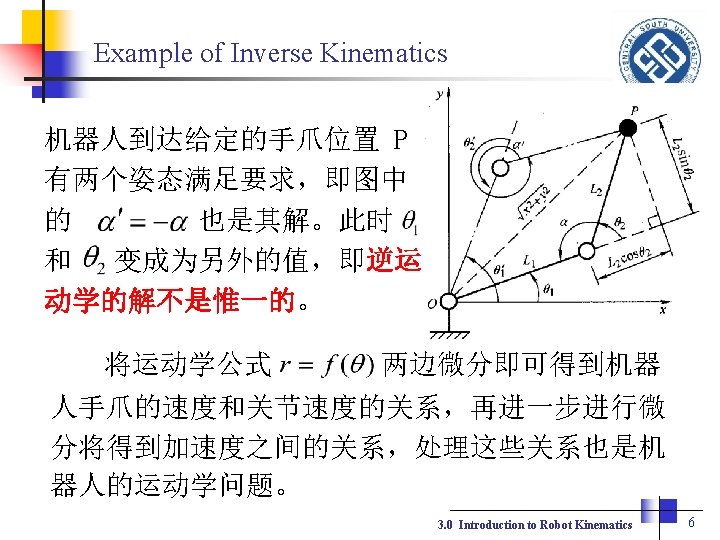
Example of Inverse Kinematics 式中 同样,如果用向量表示上述关系式,其一般可表示为 3. 0 Introduction to Robot Kinematics 5

3. 1 Representation of Kinematics Equation of Robot Manipulator Mechanics of a manipulator can be represented as a kinematics chain of rigid bodies (links) connected by revolute or prismatic joints. One end of the chain is constrained to a base, while an end effector is mounted to the other end of the chain. The resulting motion is obtained by composition of the elementary motions of each link with respect to the previous one. 3. 1 Representation of Kinematics Equation of 7


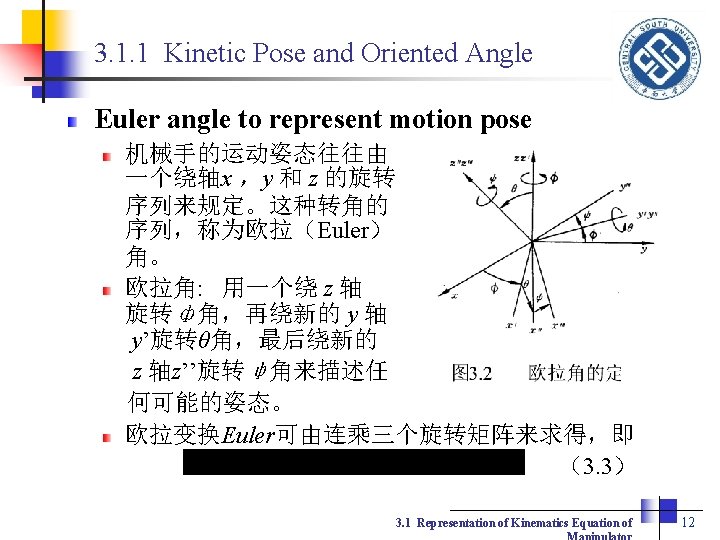
3. 1 Representation of Kinematics Equation of Robot Manipulator 3. 1. 1 Kinetic Pose and Oriented Angle 运动姿态和方向角 Motion Direction 原点由矢量p表示。 approach vector a:z向矢量 orientation vector o:y向矢量 normal vector n:x向矢量, Forming a right-hand frame: n = o a or a = n o 3. 1 Representation of Kinematics Equation of 10

3. 1. 1 Kinetic Pose and Oriented Angle Roll, Pitch, Yaw to represent motion pose 另一种常用的旋转集合是横滚(roll)、俯仰(pitch) 和偏转(yaw)。 3. 1 Representation of Kinematics Equation of 13

3. 1 Representation of Kinetic Equation of Robot Manipulator 3. 1. 2 Kinetic Position and Coordinate 运动位置和坐标 一旦机械手的运动姿态由某个姿态变换规定之后, 它在基系中的位置就能够由左乘一个对应于矢量 p的平移 变换来确定(参式 2. 20): 3. 1 Representation of Kinematics Equation of 15

3. 1. 2 Kinetic Position and Coordinate Description in Cylinder Coordinates 用柱面坐标来表示机械手手臂的位置,即表 示其平移变换。这对应于沿 x 轴平移 r,再绕 z 轴 旋转 ,最后沿 z 轴平移 z。如图 3. 4(a)所示。 3. 1 Representation of Kinematics Equation of 16

3. 1. 2 Kinetic Position and Coordinate Description in Spherical Coordinates 用球面坐标表示手臂运动位置矢量的方法,对应 于沿 z 轴平移 r,再绕 y 轴旋转β角,最后绕 z 轴 旋转 角,如图 3. 4(b)所示,即为: 3. 1 Representation of Kinematics Equation of 17
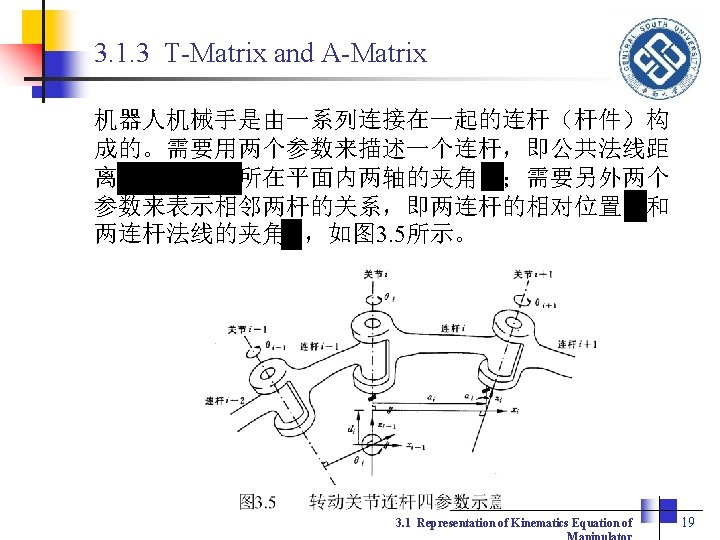

3. 1. 3 T-Matrix and A-Matrix ai-1: Link Length - mutual perpendicular unique except for parallel axis : Link Twist - measured in the right-hand sense about 3. 1 Representation of Kinematics Equation of 20

3. 1. 3 T-Matrix and A-Matrix di: Link Offset -- variable if joint i is prismatic (平动关节) : Joint Angle -- variable if joint i is revolute (转动关节) 3. 1 Representation of Kinematics Equation of 21

3. 1. 3 T-Matrix and A-Matrix Denavit-Hartenberg Parameters 4 D-H parameters 3 fixed link parameters 1 joint variable αi and ai : describe the Link i di and θi : describe the Link’s connection 3. 1 Representation of Kinematics Equation of 22

3. 1. 3 T-Matrix and A-Matrix y-vectors: complete right-hand frames 3. 1 Representation of Kinematics Equation of 23

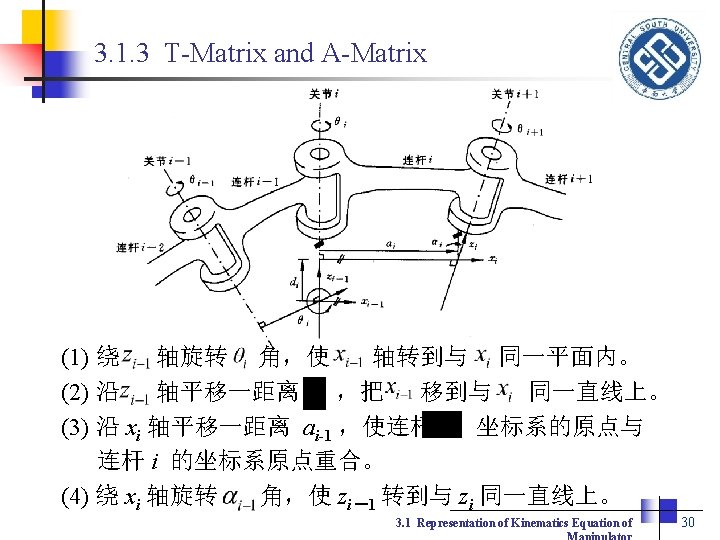
3. 1. 3 T-Matrix and A-Matrix 1. Normals 2. Origins 3. Z-axes 4. X-axes 3. 1 Representation of Kinematics Equation of 24

3. 1. 3 T-Matrix and A-Matrix 3. 1 Representation of Kinematics Equation of 25

3. 1. 3 T-Matrix and A-Matrix Example-RRR Arm 3. 1 Representation of Kinematics Equation of 26

3. 1. 3 T-Matrix and A-Matrix Example-RRR Arm = distance from zi to zi+1 along xi = angle from zi to zi +1 about xi = distance from xi-1 to xi along zi = angle from xi-1 to xi about zi link di 1 2 3 3. 1 Representation of Kinematics Equation of 27

3. 1. 3 T-Matrix and A-Matrix Example-RRR Arm = distance from zi to zi+1 along xi = angle from zi to zi +1 about xi = distance from xi-1 to xi along zi = angle from xi-1 to xi about zi di link 1 0 0 0 θ 1 2 0 L 1 0 θ 2 3 0 L 2 0 θ 3 3. 1 Representation of Kinematics Equation of 28

3. 1. 3 T-Matrix and A-Matrix = distance from zi to zi+1 along xi = angle from zi to zi +1 about xi Denavit-Hartenberg notation = distance from xi-1 to xi along zi = angle from xi-1 to xi about zi 3. 1 Representation of Kinematics Equation of 29

3. 1. 3 T-Matrix and A-Matrix Using A-Matrix to represent T-Matrix 机械手的末端装置即为连杆6的坐标系,它与连杆 坐标系的关系可由 表示为: 可得连杆变换通式为 : 3. 1 Representation of Kinematics Equation of 32

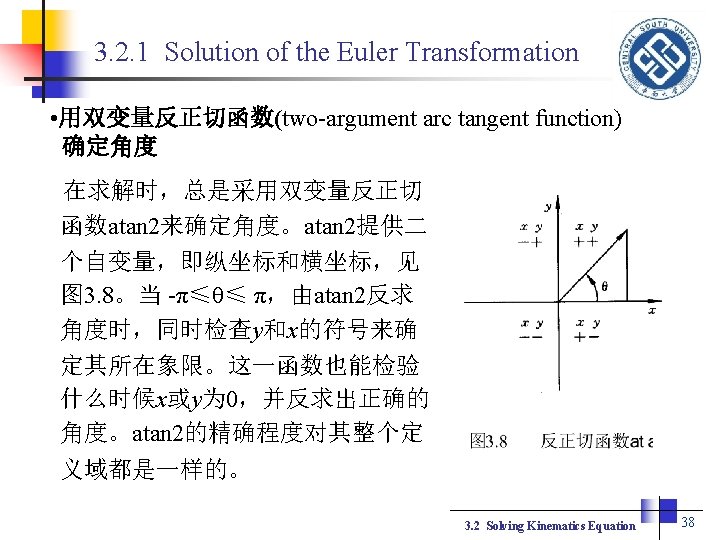
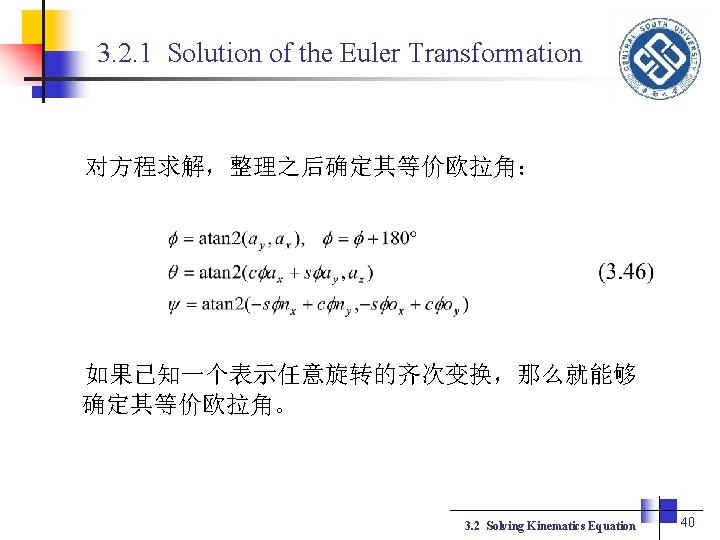
3. 2 Solving Kinematics Equation 3. 2. 1 Solution of the Euler Transformation 欧拉变换解 基本隐式方程的解 令 由式(3. 4)和(3. 23)得到: 3. 2 Solving Kinematics Equation 35

3. 2. 1 Solution of the Euler Transformation 令矩阵方程两边各对应元素一一相等,可得到 9个隐式方 程如下: 3. 2 Solving Kinematics Equation 36

3. 2. 3 Solution of Spherical Coordinate Transformation 球面变换解 把求解滚、仰和偏变换方程的技术用于球面坐标表示 的运动方程。 可推导出球面变换的解为: 3. 2 Solving Kinematics Equation 42

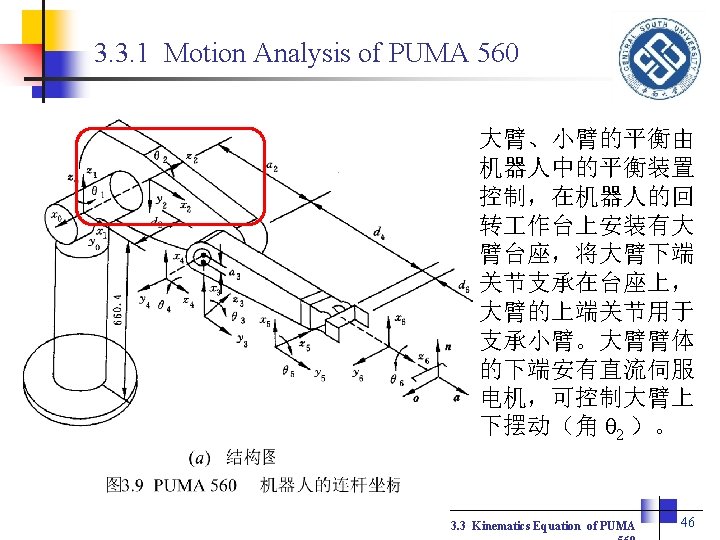
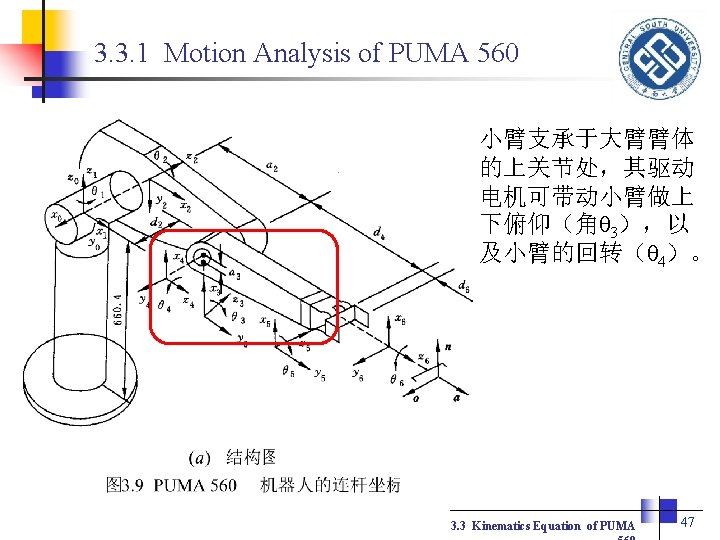
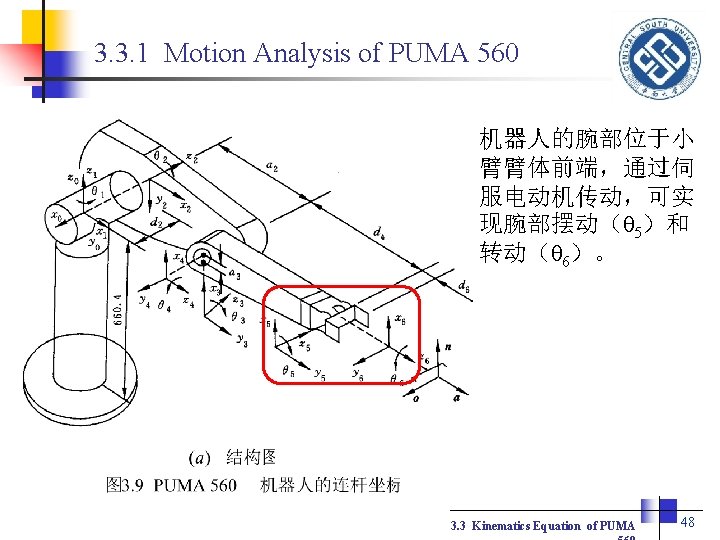
3. 3. 1 Motion Analysis of PUMA 560 3. 3 Kinematics Equation of PUMA 44


3. 3. 1 Motion Analysis of PUMA 560 3. 3 Kinematics Equation of PUMA 49

3. 3. 1 Motion Analysis of PUMA 560 Using A-Matrix to represent T-Matrix 机械手的末端装置即为连杆6的坐标系,它与连杆 坐标系的关系可由 表示为: 可得连杆变换通式为 : 3. 3 Kinematics Equation of PUMA 50
和表 3. 1所示连杆参数, 可求得各连杆变换矩阵如下: 3.")
3. 3. 1 Motion Analysis of PUMA 560 据连杆变换通式式(3. 16)和表 3. 1所示连杆参数, 可求得各连杆变换矩阵如下: 3. 3 Kinematics Equation of PUMA 51
 3. 3 Kinematics Equation")
3. 3. 1 Motion Analysis of PUMA 560 (3. 64) 3. 3 Kinematics Equation of PUMA 54
两边: 3.")
3. 3. 2 Motion Synthesis of PUMA 560 1. 求 用逆变换 左乘式(3. 65)两边: 3. 3 Kinematics Equation of PUMA 56
项元素对应相等: 利用三角代换: 其中")
3. 3. 2 Motion Synthesis of PUMA 560 1. 求 两边(2, 4)项元素对应相等: 利用三角代换: 其中 3. 3 Kinematics Equation of PUMA 57

3. 3. 2 Motion Synthesis of PUMA 560 求 式中,正、负号对应于 的两个可能解。 3. 3 Kinematics Equation of PUMA 58
项和(3, 4)项元素对应相等: 其中")
3. 3. 2 Motion Synthesis of PUMA 560 2. 求 两边(1, 4)项和(3, 4)项元素对应相等: 其中 3. 3 Kinematics Equation of PUMA 59

3. 3. 2 Motion Synthesis of PUMA 560 求 求 式中, 正、负号对应 的两种可能解。 3. 3 Kinematics Equation of PUMA 60
项和(2, 4)项元素对应相等: 3.")
3. 3. 2 Motion Synthesis of PUMA 560 3. 求 两边(1, 4)项和(2, 4)项元素对应相等: 3. 3 Kinematics Equation of PUMA 61
项和(3, 3)项元素对应相等: 3.")
3. 3. 2 Motion Synthesis of PUMA 560 4. 求 两边(1, 3)项和(3, 3)项元素对应相等: 3. 3 Kinematics Equation of PUMA 63
项和(3, 3)项元素对应相等: 3.")
3. 3. 2 Motion Synthesis of PUMA 560 5. 求 两边(1, 3)项和(3, 3)项元素对应相等: 3. 3 Kinematics Equation of PUMA 64
项和(1, 1)项元素对应相等: 3.")
3. 3. 2 Motion Synthesis of PUMA 560 6. 求 两边(3, 1)项和(1, 1)项元素对应相等: 3. 3 Kinematics Equation of PUMA 65

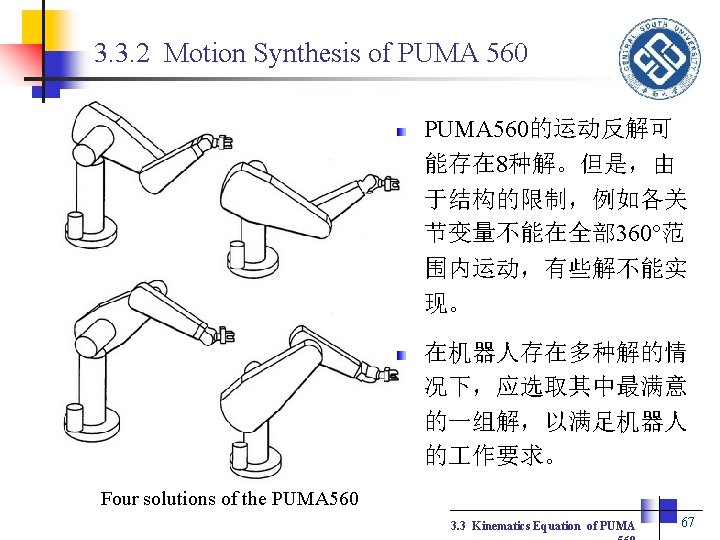
3. 3. 2 Motion Synthesis of PUMA 560 For each solution pictured, there is another solution in which the last three joints "flip“ to an alternate configuration according to the formulas: Four solutions of the PUMA 560 3. 3 Kinematics Equation of PUMA 66
 Motion Orientation of Manipulators Euler")
3. 4 Summary 小结 Representation of Kinematics Equation (Analysis) Motion Orientation of Manipulators Euler Angle -> Motion Pose Roll, Pitch, Yaw -> Motion Pose Solving Kinematics Equation (Synthesis) Solution of the Euler Transformation Solution of Roll, Pitch and Yaw Solution of Spherical Coordinate Transformation Motion Analysis and Synthesis of PUMA 560 3. 4 Summary 68
- Slides: 68