Frequency domain Block diagrams Time domain Signalflow graphs

• 系統表示法: Frequency domain → Block diagrams Time domain → Signal-flow graphs
 →預測 Tp")
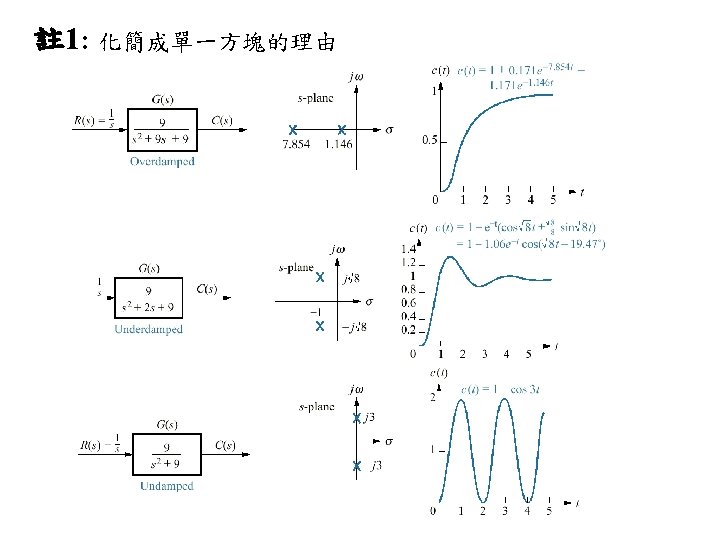
• 本章目標 1. 化簡複雜 block diagrams → 註 1 2. 由Ge(s) →預測 Tp , Ts , Tr , %OS with step input 3. Find step response for Ge(s) 4. Design sys. gain → desired transient response 註: 討論 Linear, Time-Invariant Systems 即 線性非時變系統 註 2
, b(t), k(t)")
註 2: 系統形態 Linear, Time-Invariant Systems 線性非時變系統 Linear, Time-varying Systems 線性時變系統 當a(t), b(t), k(t) 為變動的常數 Non-linear, Time-varying Systems 非線性時變系統 當a(t), b(t), k(t) 為變動的非線性函數 e. g. a(t) = sinωt 非線性非時變系統

5. 2 Block Diagrams • 符號介紹 加法器 撿取點 Figure 5. 2 Components of a block diagram for a linear, time-invariant system
 Figure 5. 3 a Cascaded subsystems Figure 5.")
• Cascade Systems (分類 1) Figure 5. 3 a Cascaded subsystems Figure 5. 3 b equivalent transfer function

• 兩子系統串連 要注意 Loading 問題 Figure 5. 4 Loading in cascaded systems
 Figure 5. 5 a. Parallel subsystems; b. equivalent")
• Parallel Systems (分類 2) Figure 5. 5 a. Parallel subsystems; b. equivalent transfer function
 Figure 5. 6 a. Feedback control system; b.")
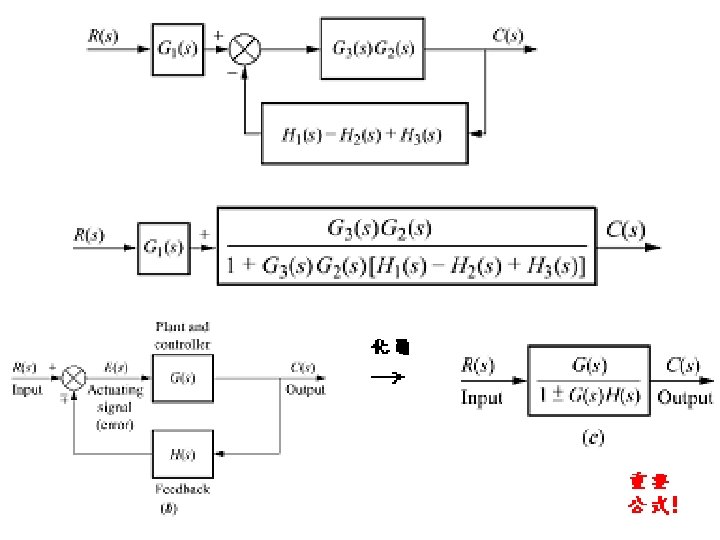
• Feedback Systems (分類 3) Figure 5. 6 a. Feedback control system; b. simplified model; c. equivalent transfer function


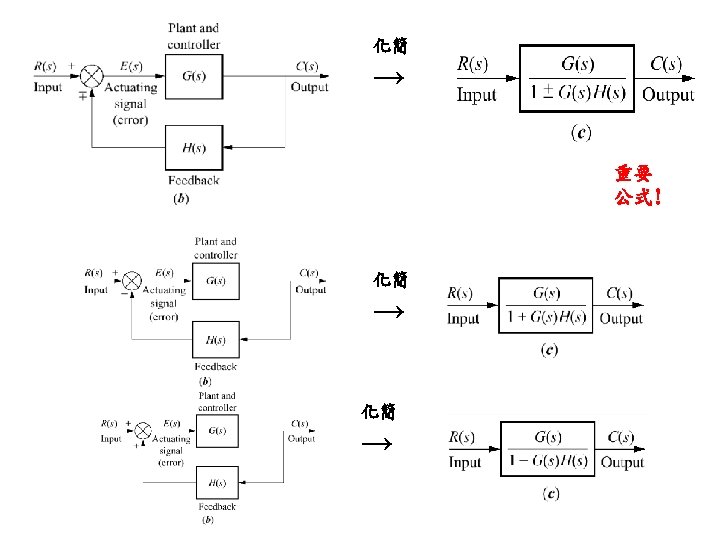
 H(s): open-loop T. F. loop gain")
G(s) H(s): open-loop T. F. loop gain
 Figure 5. 7 Block diagram")
• Block Diagram Algebra (for summing junctions ) Figure 5. 7 Block diagram algebra for summing junctions — equivalent forms for moving a block a. to the left past a summing junction; b. to the right past a summing junction
 Figure 5. 8 Block diagram")
• Block Diagram Algebra (for pickoff points ) Figure 5. 8 Block diagram algebra for pickoff points—equivalent forms for moving a block a. to the left past a pickoff point; b. to the right past a pickoff point

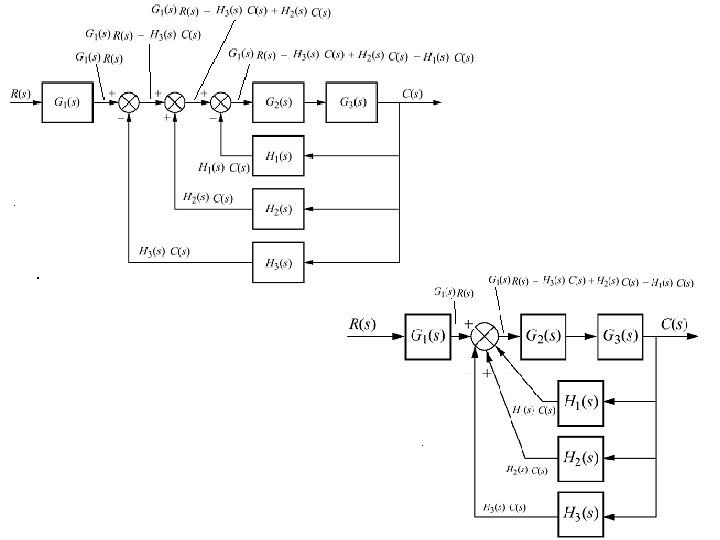
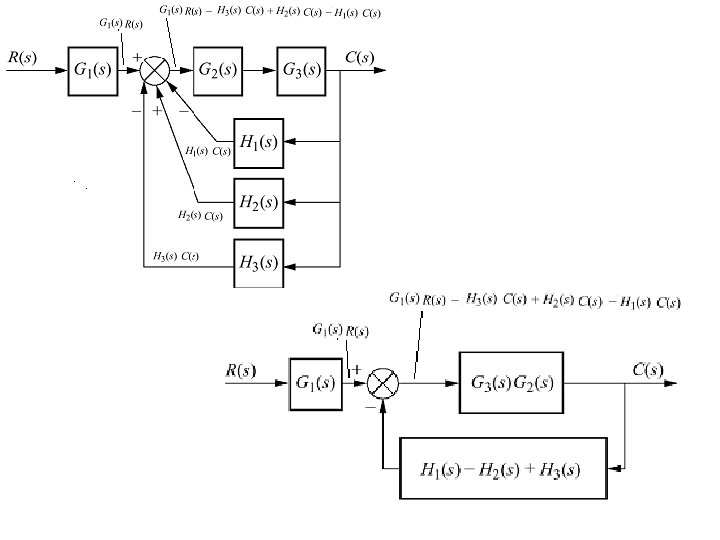
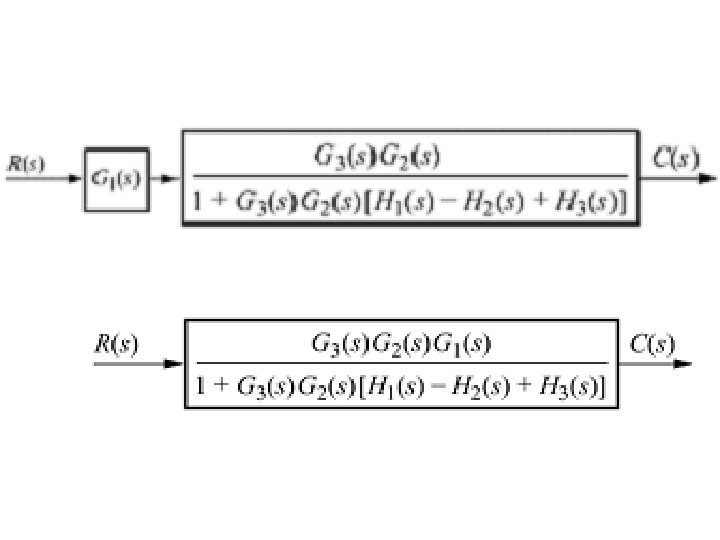
Example 5. 1 方塊圖化簡 Figure 5. 9 Figure 5. 10 a. collapse summing junctions; b. form equivalent cascaded system in the forward path and equivalent parallel system in the feedback path; c. form equivalent feedback system and multiply by cascaded G 1(s)

Example 5. 2 P. 1/4 Figure 5. 11

Example 5. 2 P. 1/4 Figure 5. 12 a

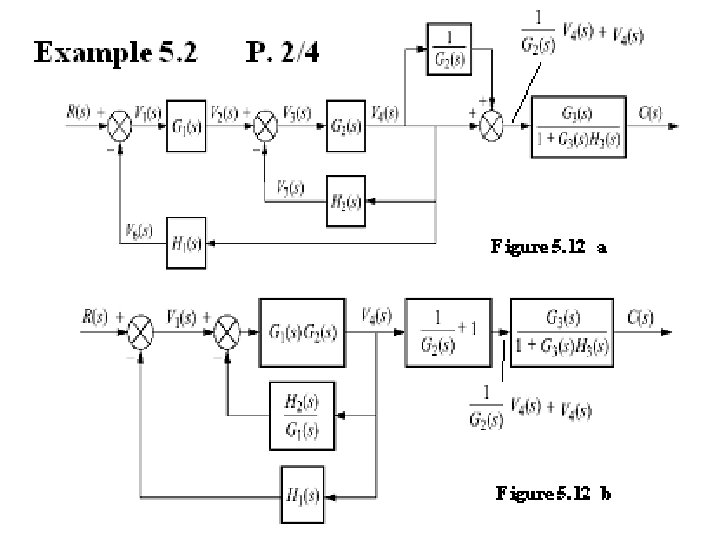
Example 5. 2 P. 2/4 Figure 5. 12 a Figure 5. 12 b

Example 5. 2 P. 3/4 Figure 5. 12 b Figure 5. 12 c

Example 5. 2 P. 4/4 Figure 5. 12 c Figure 5. 12 d Figure 5. 12 e

5. 3 Analysis and Design of Feedback Systems Figure 5. 14 Second-order feedback control system K 為變數 ↙ Example 5. 3 Figure 5. 15 Feedback system 求 Tp , Ts , %OS Find ζ, ωn first

Example 5. 4 Figure 5. 16 求k=? Such that %OS=10% gain design for transient response H. W. 1 Skill-Assessment Exercise 5. 2 H. W. 2 Problem 5 Fig. P 5. 5 H. W. 3 Problem 17 Fig. P 5. 17 Have a good time.
- Slides: 29