Fighting with spherical coordinates Simon Strange Pipeworks The




")

")





")
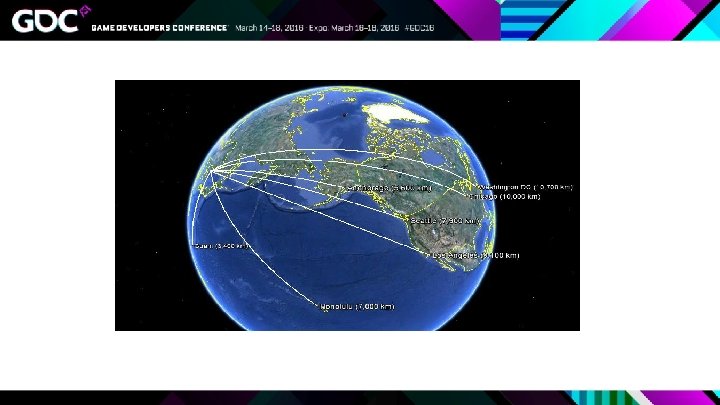
^2 = R^2 + d^2 (R+h)^2 = R^2 + 2 Rh +h^2 d^2 =")
 check: d^2 = (x-a)^2 + (y-b)^2 + (z-c)^2")


")
 j Provides a linear translation of distance, measured")
 j Provides a linear translation of distance, measured")

")
 q Provides a linear translation of distance, measured")
 q Provides a linear translation of distance, measured")



- Slides: 42
Fighting with spherical coordinates Simon Strange Pipeworks
The Point of all this: Some concepts we’ve already learned could be giving us new and important insights into the problems we’re solving.
Backing Up!
Backing Up! (Who is this guy? )
Simon Strange
(Shameless Plug)
• Surface Warfare
• Surface Warfare • ASMD
• Surface Warfare • ASMD • Sensors & Signals
• Surface Warfare • ASMD • Sensors & Signals • EW Softkill
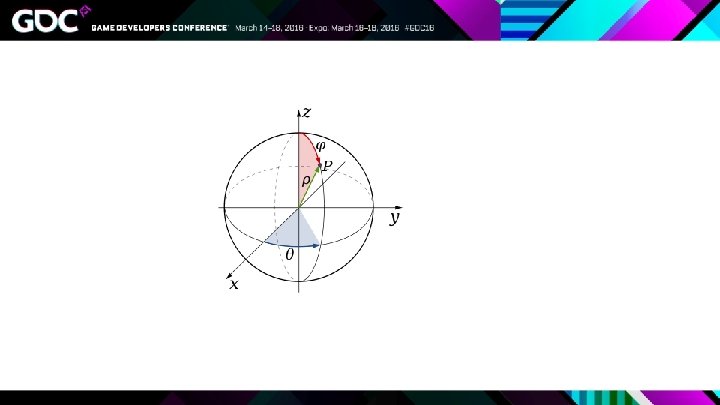
Spherical Coordinates! (finally)
(R+h)^2 = R^2 + d^2 (R+h)^2 = R^2 + 2 Rh +h^2 d^2 = 2 Rh + h^2
Standard distance (collision) check: d^2 = (x-a)^2 + (y-b)^2 + (z-c)^2
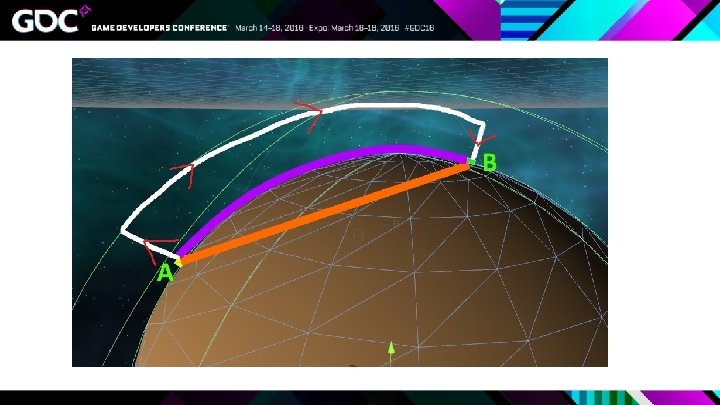
Great Arc distance between two points on a unit sphere: s=rcos^− 1(cosθ 1 cosθ 2 + sinθ 1 sinθ 2 cos(φ1−φ2)).
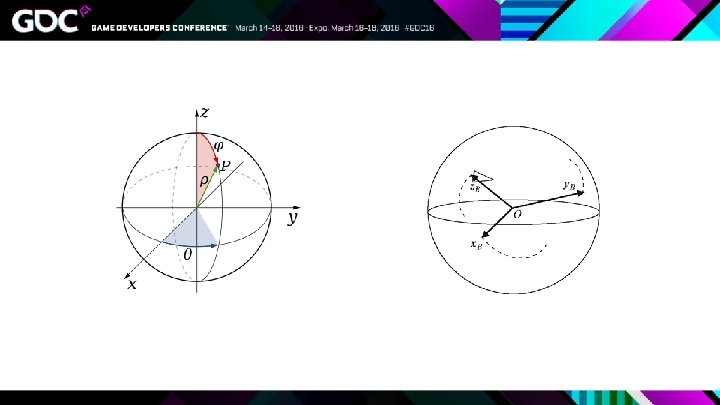
For a point (r, q, j)
For a point (r, q, j) j Provides a linear translation of distance, measured in radians.
For a point (r, q, j) j Provides a linear translation of distance, measured in radians. j IS the distance!
Our goal : find a simple rotational transformation which can be applied efficiently to all points, such that an arbitrary point moves to the North Pole. If successful, we can order all objects by f coordinate, to determine visibility by distance.
For a point (r, q, j)
For a point (r, q, j) q Provides a linear translation of distance, measured in radians.
For a point (r, q, j) q Provides a linear translation of distance, measured in radians. q IS the distance from prime meridian!
Rodrigues' rotation formula:
Rodrigues' rotation formula: 0
The Point of all this: Some concepts we’ve already learned could be giving us new and important insights into the problems we’re solving.