Feeding Polyhedral Parts Feeding Polyhedral Parts Related Work

, Birk (1974), Salisbury (1982) Fearing (1986), Nguyen")




 Complete Algorithm Computes m x m Transition Matrix in time")
: • •")
 • Avoiding Collisions with")
- Slides: 12
Feeding Polyhedral Parts
Feeding Polyhedral Parts Related Work Paul (1973), Birk (1974), Salisbury (1982) Fearing (1986), Nguyen (1986) Tournassound, Lozano-Perez, and Mazer (1987) Ponce and Faverjon (1992), Rus (1992) Erdmann, Mason, and Vanecek (1993)
Pivoting Animation
Pivoting Gripper
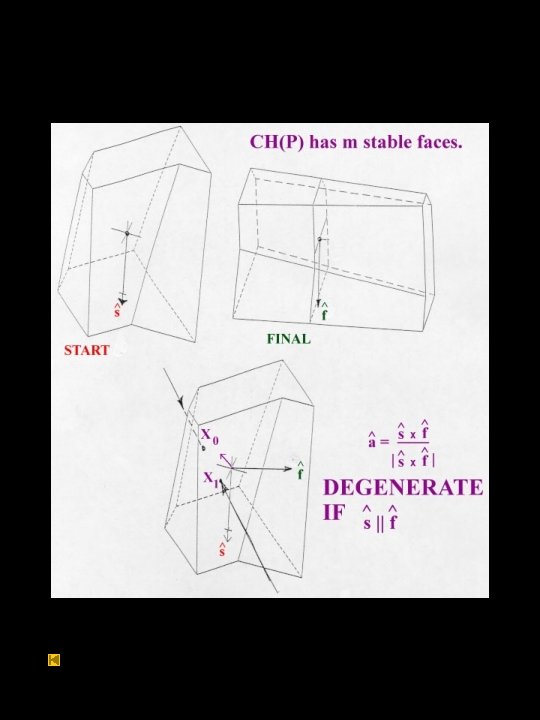
Problem: Choose Grasp Axis
Problem Definition • Stable poses of the polyhedron • “Hard-finger” contacts: • resists forces and torques, except about grasp axis. Input: • Shape of polyhedral part with n faces, • Center of mass, • Coefficient of friction, • Initial and Desired poses. Criteria: • • Grasp Axis is parallel to workable, Grasp won’t slip, Part will rotate due to gravity when lifted, When replaced, part will assume desired pose. Output: • Pivoting Axis for each pair of stable poses • m x m Transition Matrix
Rao, Kriegman, Goldberg (1996) Complete Algorithm Computes m x m Transition Matrix in time O (m 2 n log n).
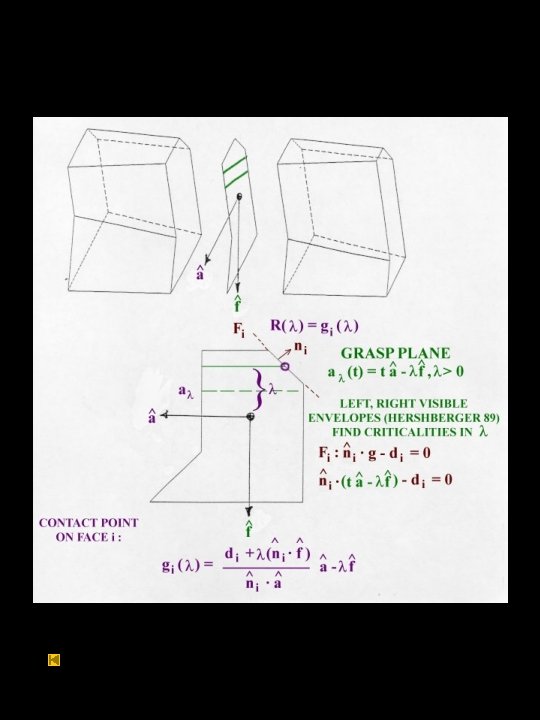
Result: 1. We can find candidate grasps in time O (n 3): • • Slicing part at critical heights, “Effective” , Nguyen regions, Algebraic formulation of stability: f (z) = 0 2. A pivoting grasp always exists if: • Part is convex with interior com, and • no slip.
Future Work • “Capture Regions” • Active Pivot Grasps (APGs) • Avoiding Collisions with Nearby Parts • Toppling • Learning Transition Probabilities