FasterRCNN Toward RealTime Object Detection with Region Proposal

Faster-RCNN Toward Real-Time Object Detection with Region Proposal Networks 2019. 09. 27 박진혁 1

Contents v Introduction v R-CNN v Faster-RCNN v 실험 결과 v 결론 2
 • Io. U = 교집합(Intersection) / (실제(Actual) +")
Introduction v. Io. U(Intersection over Union) • Io. U = 교집합(Intersection) / (실제(Actual) + 예측(Prediction) - 교집합(Intersection) ) 실제(Actual) 예측(Prediction) 9 교집합(Intersection)
 • 1개의 Object당 1개의 AP값을 구하고, 여러 Object-Detector에")
Introduction v m. AP(mean average precision) • 1개의 Object당 1개의 AP값을 구하고, 여러 Object-Detector에 대해 평균한 값 • AP : Precision 값들의 Average 예측 값 실제 값 10
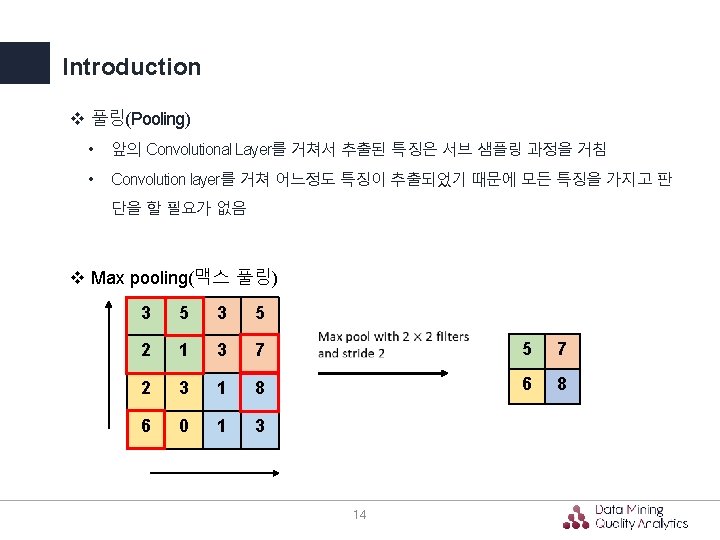
 • 기존의 인공 신경망 구조에 Convolutional Layer와 Pooling Layer를")
Introduction v. Convolutional Neural Network(CNN) • 기존의 인공 신경망 구조에 Convolutional Layer와 Pooling Layer를 추가한 구조 강아지 : 90% 고양이 : 5% 분류결과 사진에서 추출된 특징 Neural Network Convolutional Layer 11 너구리 : 3%. . .

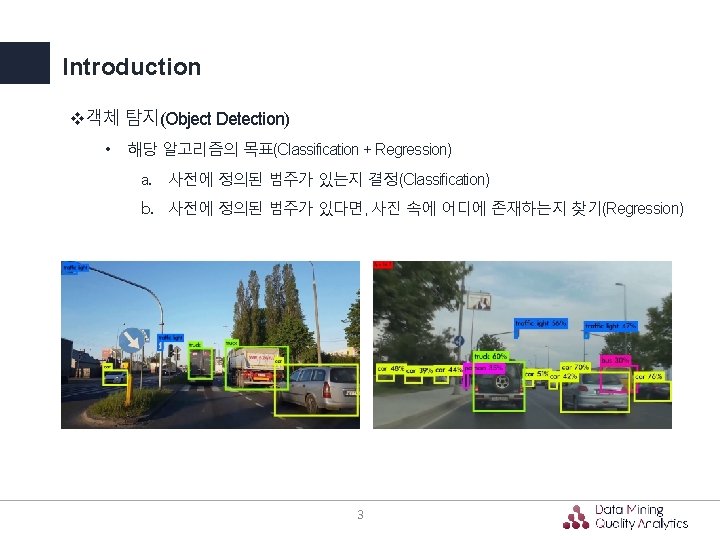
Introduction v. CNN에서 R-CNN • CNN에서 Regression과 Classification을 합쳐서 Object Detect를 해보자! Classification Regression + Dog Object Detection = Dog 16 Dog, Fish
 v. R-CNN의 기본 구조 1. Region proposal algorithm 2. CNN : feature vector")
R-CNN(2013) v. R-CNN의 기본 구조 1. Region proposal algorithm 2. CNN : feature vector extract 3. SVM(Classification Algorithm) 17
 Region Proposal Uijlings, J. R. , Van De Sande, K. E. , Gevers,")
R-CNN(2013) Region Proposal Uijlings, J. R. , Van De Sande, K. E. , Gevers, T. , & Smeulders, A. W. (2013). Selective search for object recognition. International journal of computer vision, 104(2), 154 -171. 18
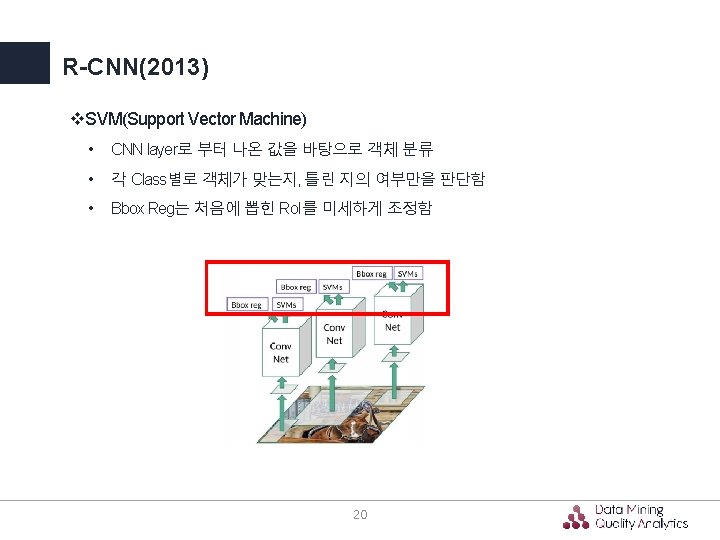
 v. CNN : feature vector extract • 앞의 Region을 압축한 Input으로, Pre-trained 된")
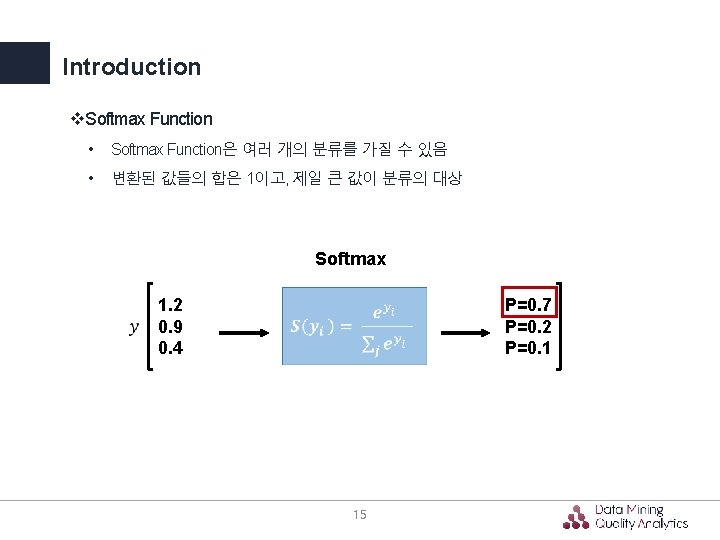
R-CNN(2013) v. CNN : feature vector extract • 앞의 Region을 압축한 Input으로, Pre-trained 된 CNN에 통과시켜 새로운 feature를 생 성함 • 기존의 CNN Classifier에서 최종 Softmax 분류기 부분을 제외한 output을 결과물 feature로 사용함 19
 v기존의 PASCAL VOC R-CNN BB는 R-CNN에 Bounding Box Regression를 적용했을 경우 21")
R-CNN(2013) v기존의 PASCAL VOC R-CNN BB는 R-CNN에 Bounding Box Regression를 적용했을 경우 21
 v. Fast R-CNN과의 차이점 1. 각 Proposal들이 CNN를 거치는 것이 아닌 전체")
Fast R-CNN(2015) v. Fast R-CNN과의 차이점 1. 각 Proposal들이 CNN를 거치는 것이 아닌 전체 이미지에 대해 CNN을 한번 거친 후 출력 된 Feature map에서 객체 탐지를 함 2. 학습 시 모든 Network layer들이 업데이트 됨 Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE international conference on computer vision (pp. 1440 -1448). 24
 25")
Fast R-CNN(2015) 25
 26")
Fast R-CNN(2015) 26
 v. Ro. I(Region of Interest) Pooling • Input image에 한번만 CNN을 적용하고")
Fast R-CNN(2015) v. Ro. I(Region of Interest) Pooling • Input image에 한번만 CNN을 적용하고 여기서 나온 feature map에 Ro. I Pooling을 적용시킴 • Ro. I Pooling을 이용하여 결과의 output size가 같도록 해줌 • 여전히 Region Proposal에서 시간이 오래 걸림 27
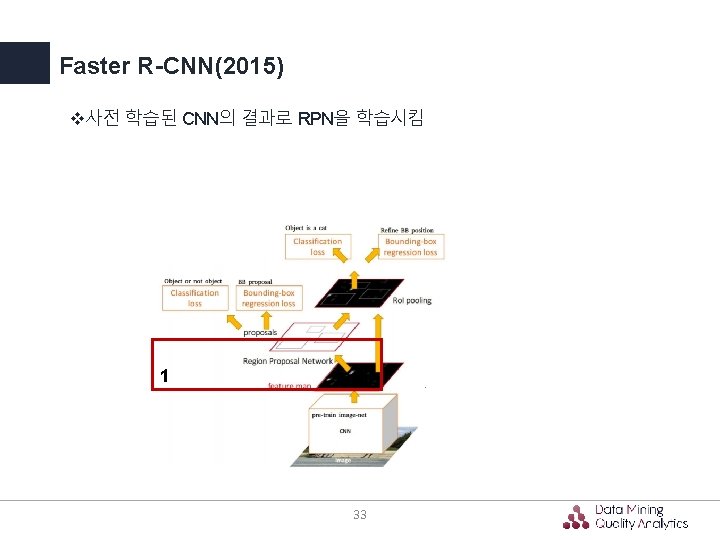
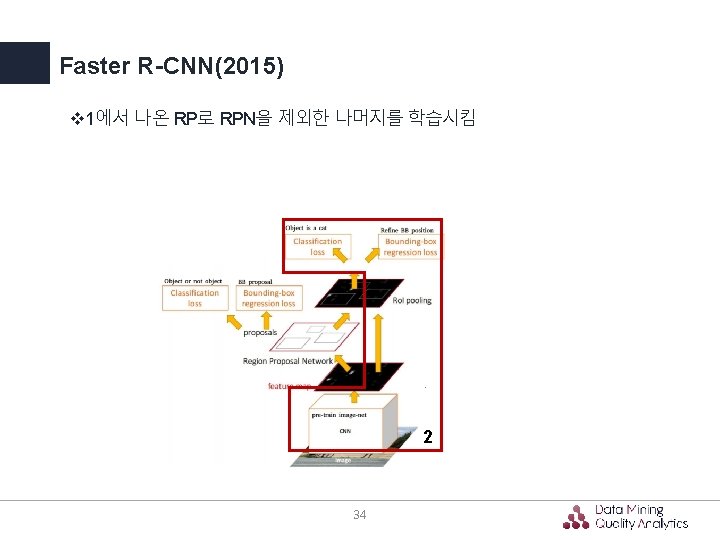
 v. Faster R-CNN • 11987회 인용 29")
Faster R-CNN(2015) v. Faster R-CNN • 11987회 인용 29
 30")
Faster R-CNN(2015) 30
 v. RPN(Region Proposal Network) • Anchor Box : Sliding Window의 각 위치에서")
Faster R-CNN(2015) v. RPN(Region Proposal Network) • Anchor Box : Sliding Window의 각 위치에서 Bounding Box의 후보로 사 용되는 Box v. RPN에서는 object인지 background인지만 분류함 K : proposal의 최대 개수 2 k : Object인지 아닌지 4 k : 좌표(x, y), 가로, 세로 31
 v. RPN(Region Proposal Network) • Labeling to each anchor : 1. 가장")
Faster R-CNN(2015) v. RPN(Region Proposal Network) • Labeling to each anchor : 1. 가장 높은 Intersection-over-Union(Io. U)을 가지고 있는 anchor 2. Io. U > 0. 7을 만족하는 anchor(positive) 3. Io. U가 0. 3보다 낮은 anchor는 non-positive anchor로 간주함 32
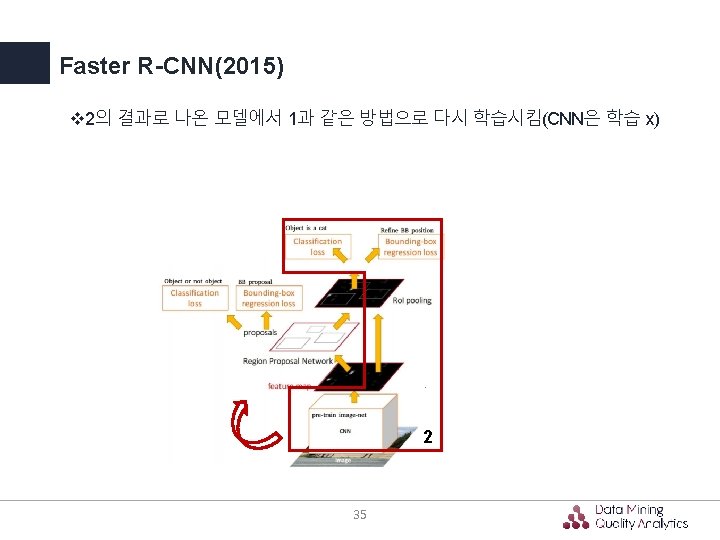
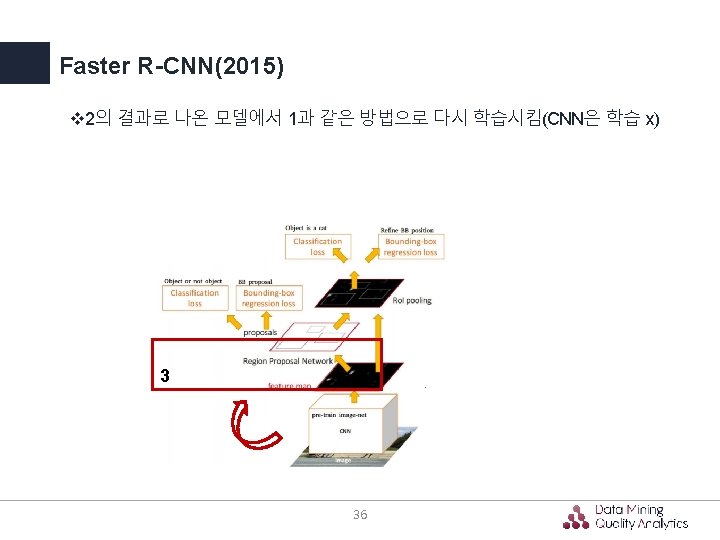
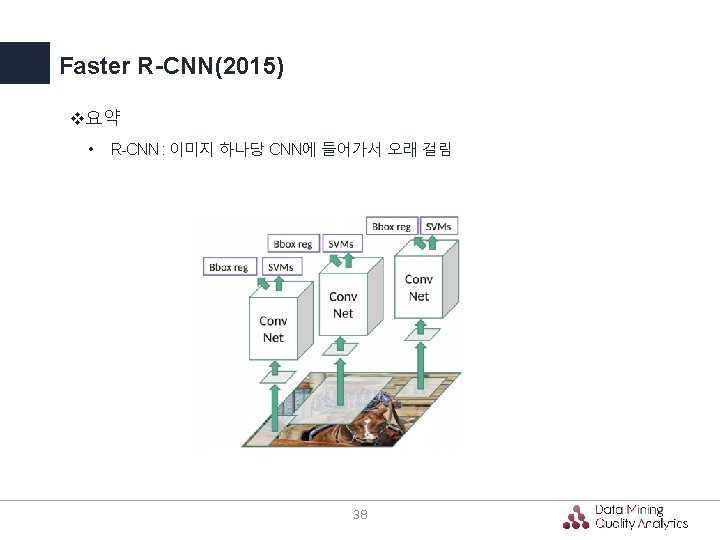
 v요약 • Fast R-CNN : Ro. I부분에서 여전히 오래 걸림 39")
Faster R-CNN(2015) v요약 • Fast R-CNN : Ro. I부분에서 여전히 오래 걸림 39
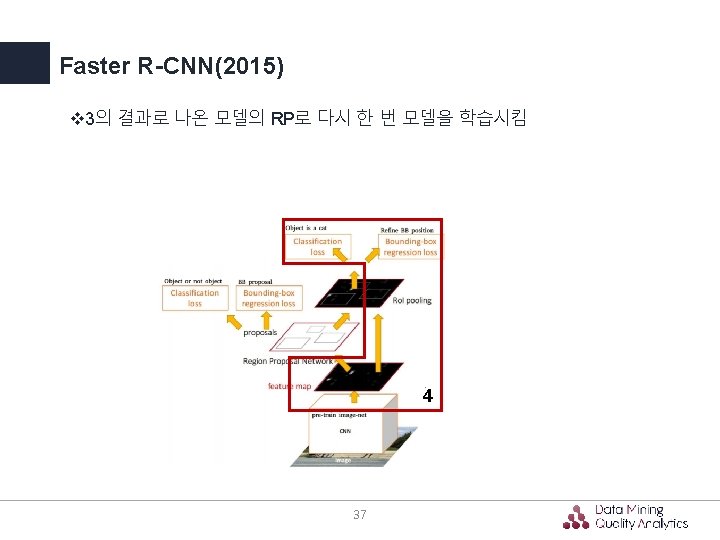
 v요약 • Faster R-CNN : RPN을 넣어서 시간 단축 40")
Faster R-CNN(2015) v요약 • Faster R-CNN : RPN을 넣어서 시간 단축 40

Conclusion v. Result 41
 R-CNN Faster R-CNN 50 s 2")
Conclusion v성능 비교 Test time per Image(with proposal) R-CNN Faster R-CNN 50 s 2 s 0. 2 s 66. 0 66. 9 69. 9 상대적 Speed m. AP (VOC 2007) 42

Conclusion 43

Conclusion v 2019년 까지의 Object Detection 흐름 44
 (2) (3) (4) 46")
Appendix v Bounding-Box Regression Means the ground-truth bounding box (1) (2) (3) (4) 46
 (2) (3) (4)")
Appendix v Bounding-Box Regression L 2 Loss regularization term 47 (1) (2) (3) (4) (5) (6) (7) (8)

Appendix Smooth L 1 loss Log loss 49
을 하여 같은 사이즈의")
Appendix v. Ro. I Pooling Layer • 항상 max pooling(with stride)을 하여 같은 사이즈의 output이 나오게 함 50 0. 85 0. 84 0. 97 0. 96

- Slides: 51