ESTTICA GRAFICA CALCULO DE REACCIONES DE VINCULO TIPOS










- Slides: 11
ESTÁTICA GRAFICA CALCULO DE REACCIONES DE VINCULO.
TIPOS DE APOYOS. • APOYO SIMPLE, MÓVIL O DE PRIMERA ESPECIE. • ES UN APOYO DENOMINADO DE RODILLO, RESTRINGE UN • UN GRADO DE LIBERTAD, EN LA DIRECCIÓN PERPENDICULAR • EN LA DIRECCIÓN PERPENDICULAR DE LA DIRECCIÓN SOBRE • LA QUE SE ENCUENTRA APOYADO. SE REPRESENTA CON UN • TRIANGULO APOYADO SOBRE DOS CILINDROS
PERMITEN UN MOVIMIENTO DE TRASLACIÓN EN LA DIRECCIÓN DEL EJE DEL ELEMENTOS ESTRUCTURAL Y UN GIRO ALREDEDOR DE DICHO EJE, E IMPIDEN LA TRASLACIÓN EN LA DIRECCIÓN PERPENDICULAR AL EJE.
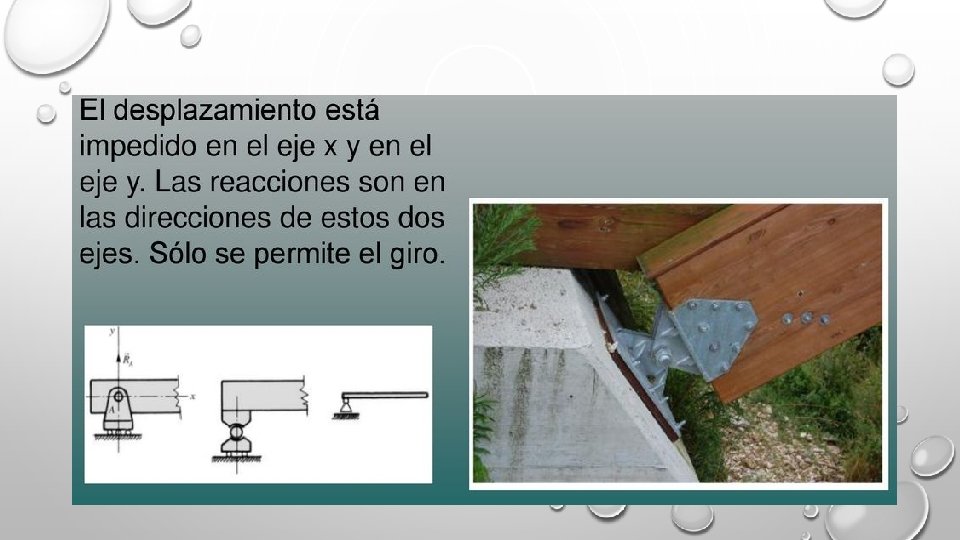
APOYO FIJO, DOBLE O DE SEGUNDA ESPECIE. • SOLO PERMITE LA ROTACIÓN ALREDEDOR DE SU EJE, ESTE APOYO LIMITA LA TRASLACIÓN EN DIRECCIÓN AL EJE Y-Y Y EL X-X- RESTRINGE DOS GRADOS DE LIBERTAD.
F 2 v Ra h F 2 h Ra v
ECUACIONES DE EQUILIBRIO • LAS ECUACIONES QUE DESCRIBEN EL EQUILIBRIO ESTÁTICO SON PLANTEADAS EN LA PRIMERA LEY DE NEWTON Y CONTROLAN LOS MOVIMIENTOS DEL CUERPO EN TRASLACIÓN Y ROTACIÓN. • ∑F=0 Y ∑M=0 • PLANTEAREMOS LAS CONDICIONES DE EQUILIBRIO PARA EL EJEMPLO ANTERIOR. • ∑FX=0 Y ∑FY=0
Partimos de suponer las reacciones que las cargas producen en Ra y en Rb con lo cual tenemos tres incógnitas Rah, Rav y Rb • Por ello necesitaremos tres ecuaciones de equilibrio una para cada incógnita a saber: • ∑FX=0 • ∑FY=0 • ∑M=0 condiciones de equilibrio. • PARA ESTRUCTURAS PLANAS BASTA CON PLANTEAR TRES ECUACIONES QUE REPRESENTEN LOS TRES GRADOS DE LIBERTAD DEL CUERPO, DOS DESPLAZAMIENTOS Y UNA ROTACIÓN: • ∑FX=0, ∑FY=0 Y ∑MO=0
PARA ELLO SERÁ NECESARIO PLANTEAR LA PRIMERA CONDICIÓN DE EQUILIBRIO ∑MA=0 ESTABLECIENDO EL CENTRO DE MOMENTOS EN EL APOYO FIJO (A). F 2 v Rah F 2 h Ra Rb Rav ∑Ma=0; (adoptaremos como positivo el giro en el sentido de las agujas del reloj) -Rb. 5 m + F 2 v. 4 m. + F 2 h. 0 m + F 1. 1 m + Rav. 0 m + Rb. 0 m = 0 Siendo: F 2 h, Rah, y Rav = 0 (dado que la distancia perpendicular al centro de momento es 0 )
Entonces la ecuación quedara : -Rb. 5 m + F 2 v. 4 m. + F 2 h. 0 m + F 1. 1 m + Rav. 0 m + Rah. 0 m = 0 -Rb. 5 m + F 2 v. 4 m. + + F 1. 1 m = 0 Sabemos que : F 2 v es igual a F 2. Sen 60º ( debido a que es la componente vertical de F 2) (Sen 60 = 0, 866 ) Despejando y reemplazando tenemos: Rb 4 T. 0, 866. 4 m + 2 T. 1 m 13, 85 tm + 2 tm 15, 85 tm. 5 m 5 m 5 m Rb = 3, 17 t.
CONOCIDO Rb, ESTAMOS EN CONDICIONES DE HALLAR RAH Y RAV. APLICANDO LAS ECUACIONES DE PROYECCIÓN EN LOS EJES X-X E Y-Y. • APLICANDO LAS PROYECCIONES EN EL EJE X-X • Rah – F 2 h = 0 ES DECIR QUE ∑FX=0. Rah = F 2 h. • PERO: • F 2 h es igual a F 2. Cos. 60ª= 4 T. O, 5 = 2 T. • ENTONCES Rah = 2 t. • APLICANDO LAS PROYECCIONES EN EL EJE Y-Y • - Rav + F 1 + F 2 v = 0 • + F 1 + F 2 v = Rav • Rav = 4 T. +3, 46 T = 7, 46 t. ∑FY=0