Epipolar Geometry and the Fundamental Matrix F The















T")
![Cross products 2 • Matrix [a]x is singular and a is its null vector](https://slidetodoc.com/presentation_image_h/d84333194b6f7a02ee492d08fcc96b74/image-17.jpg "Cross products 2 • Matrix [a]x is singular and a is its null vector")




")
")







































- Slides: 63
Epipolar Geometry and the Fundamental Matrix F The Epipolar Geometry is the intrinsic projective geometry between 2 views and the Fundamental Matrix encapsulates this geometry x F x’ = 0
Epipolar geometry • The Epipolar geometry depends only on the internal parameters of the cameras and the relative pose. • A point X in 3 space is imaged in 2 views: x and x’ • X, x, x’ and the camera centre C are coplanar in the plane p • The rays back-projected from x and x’ meet at X
Fig. 8. 1 Point correspondence geometry
Point correspondence geometry
Fig. 8. 2 Epipolar Geometry
Epipolar geometry
The geometric entities involved in epipolar geometry
Fig 8. 3
Converging cameras
Fig 8. 4
Motion parallel to the image plane
Fig. 8. 5 Geometric derivation
Point transfer via a plane
The fundamental matrix F • x l’ • Geometric Derivation • Step 1: Point transfer via a plane There is a 2 D homography Hp mapping each xi to xi’ Step 2: Constructing the epipolar line
Constructing the epipolar line
Cross products • If a = ( a 1, a 2 , a 3)T is a 3 -vector, then one define a corresponding skew-sysmmetric matrix as follows:
Cross products 2 • Matrix [a]x is singular and a is its null vector • a x b = ( a 2 b 3 - a 3 b 2, a 3 b 1 - a 1 b 3 , a 1 b 2 – a 2 b 1)T • a x b = [a]x b =( a. T [b]x )T
Algebraic derivation
Algebraic derivation 2
Example 8. 2
Example 8. 2 b
Properties of the fundamental matrix (a)
Properties of the fundamental matrix (b)
Summary of the Properties of the fundamental matrix 1
Summary of the properties of the fundamental matrix 2
Fig. 8. 6 a Epipolar line homography 1
Fig. 8. 6 b Epipolar line homography 2
Epipolar line homography
The epipolar line homography
A pure camera motion
Pure translation
Fig. 8. 8
Pure translation motion
Example of pure translation
Fig. 8. 9 General camera motion
General camera motion
Example of general motion
Pure planar motion
Retrieving the camera matrices Using F to determine the camera matrices of 2 views • Projective invariance and canonical cameras • Since the relationships l’ = Fx and • x’ F x = 0 are projective relationships • which
Projective invariance and canonical cameras • The camera matrix relates 3 -space measurements to image measurements and so depends on both the image coordinate frame and the choice of world coordinate frame. • F is unchanged by a projective transformation of 3 -space.
Projective invariance and canonical cameras 2
Canonical form camera matrices
Projective ambiguity of cameras given F
Projective ambiguity of cameras given F 2
Projective ambiguity of cameras given F 3
Canonical cameras given F
Canonical cameras given F 2
Canonical cameras given F 3
Canonical cameras given F 4
The Essential Matrix
Normalized Coordinates
Normalized coordinates 2
Normalized coordinates 3
Properties of the Essential Matrix
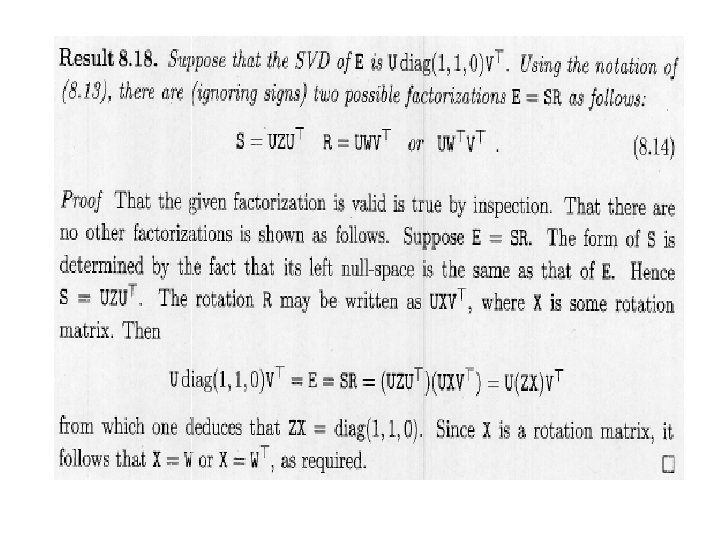
Result 8. 17 on Essential matrix
Result 8. 17 on Essential matrix 2
Extraction of cameras from the Essential Matrix
Determine the t part of the camera matrix P’
Result 8. 19
Geometrical interpretation of the four solutions
Geometrical interpretation of the four solutions 2
The 4 possible solutions for calibrated reconstruction from E