Encoders What is an encoder An encoder is




 accelerates, the mass exerts")


















 220 as M (Mega) 230 as")


10 to binary 0. 6875 0. 3750 0. 7500 0.")


- Slides: 33
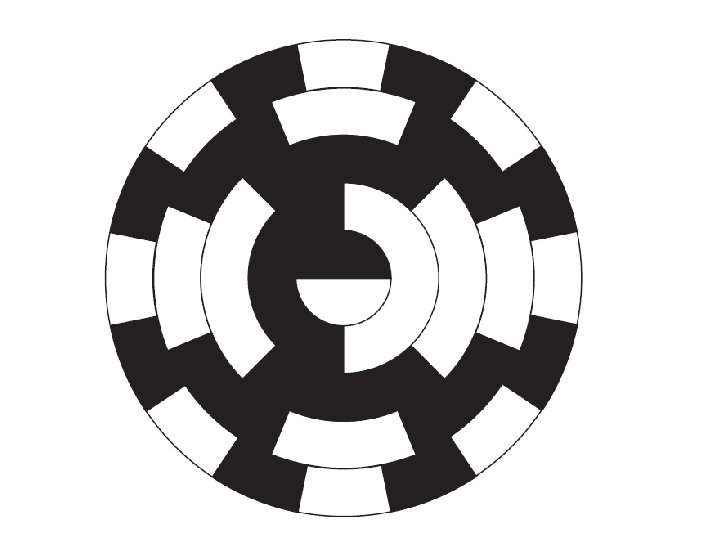
Encoders • What is an encoder? An encoder is a sensor for converting rotary motion or position to a series of electronic pulses
Types of encoders 1. Absolute encoders 2. Incremental encoders 1. Absolute encoders • Absolute encoders have a unique code that can be detected for each angular position • Absolute encoders are much more complex and expensive than incremental encoders
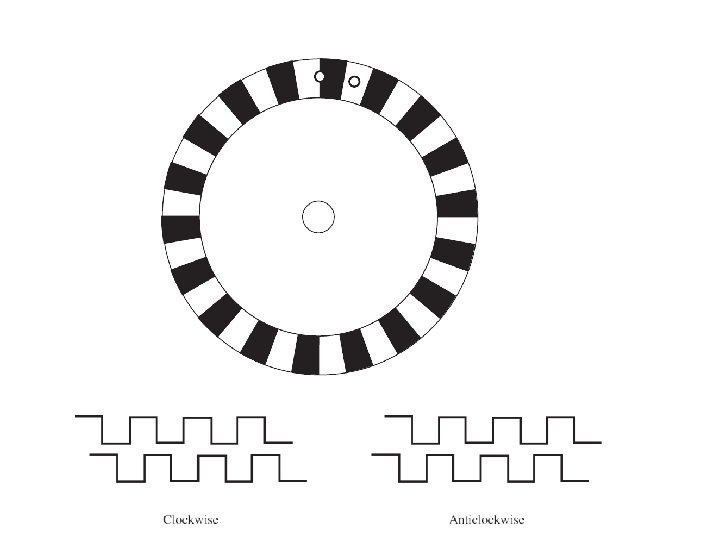
2. Incremental encoders • Pulses from LEDS are counted to provide rotary position • Two detectors are used to determine direction (quadrature)
Acceleration sensors • Although acceleration can be derived from the time history data obtainable from linear or rotary sensors, • The accelerometers whose output is directly proportional to the acceleration is preferred • Accelerometers are used to measure acceleration. The majority of these sensors are, by definition, force sensors, being based on Newton's second law of motion: force = mass x acceleration.
Cantilever beam spring-mass system When the object (and the accelerometer) accelerates, the mass exerts a force, which the transducer translates into a voltage output
• Certain materials were observed to generate a voltage when subjected to a mechanical strain, or undergo a change in physical dimensions under an applied voltage. • In response to a mechanical strain the piezoelement generates a charge, which is temporarily stored in the inherent capacitance of the piezoelement.
Piezoelectric accelerometer and an equivalent circuit
• The relationship between an applied force and the surface charge generated is: Q = DF, where Q is the surface charge, D is the piezoelectric constant and F is the applied force. With time the charge dissipates due to leakage This makes piezoelements most useful for dynamic measurements, such as acceleration.
Force, Torque & Pressure Sensors • Among many type of force/torque sensors, the strain gage dynamometers and piezoelectric type are most common • Both are available to measure force and/or torque either in one axis or multiple axes • The dynamometers make use of mechanical members that experiences elastic deflection when loaded • These types of sensors are limited by their natural frequency • On the other hand, the piezoelectric sensors are particularly suitable for dynamic loadings in a wide range of frequencies. • They provide high stiffness, high resolution over a wide measurement range, and are compact.
Temperature Sensors • A variety of devices are available to measure temperature, the most common of which are thermocouples, thermistors, resistance temperature detectors (RTD), and infrared types. • Thermocouples are the most versatile, inexpensive, and have a wide range (up to 1200°C typical) • A thermocouple simply consists of two dissimilar metal wires joined at the ends to create the sensing junction • When used in conjunction with a reference junction, the temperature difference between the reference junction and the actual temperature shows up as a voltage potential.
• Thermisters are semiconductor devices whose resistance changes as the temperature changes. • They are good for very high sensitivity measurements in a limited range of up to 100°C • The relationship between the temperature and the resistance is nonlinear. • RTDs use the phenomenon that the resistance of a metal changes with temperature. They are, however, linear over a wide range and most stable.
Infrared type sensors use the radiation heat to sense the temperature from a distance. These noncontact sensors can also be used to sense a field of vision to generate a thermal map of a surface.
Actuators • DC Motors • Stepper Motors • AC Motors • Hydraulics and Pneumatics
DC Motors • The rotor of DC motor is wound in such a way that the electromagnetic force causes the rotor to rotate • If the currents in the motor’s conductors were constant, the rotor would move to some stable position, swing to and fro around it a few times, and then come to rest. • But the current is not allowed to be constant. • Long before the stable position is reached, a commutator breaks the current to that particular coil and energizes the next one in succession. The motor continues to rotate. • In a brushless motor the coils are fixed and the magnet rotates.
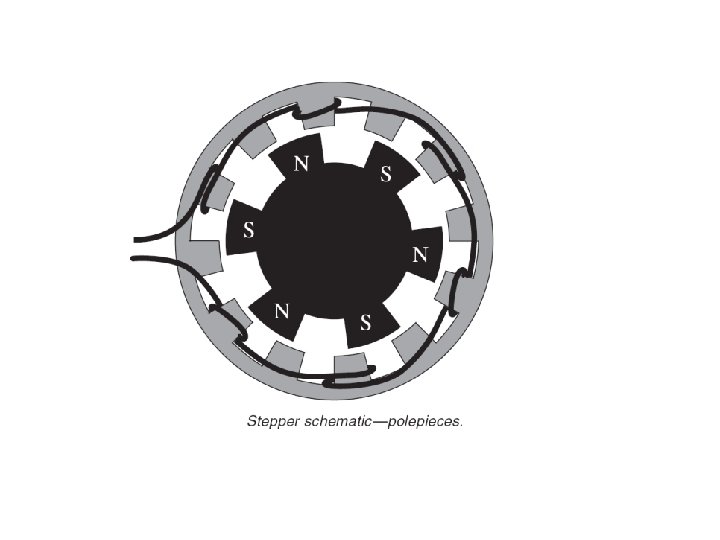
Stepper Motors Fig. 1 In practice, the magnet of a stepper motor has a large number of poles, and the windings are helped by a similar large number of salient pole pieces (Fig. 2) in the soft iron on which they are wound
AC Motors AC motors are another family of motors depend on alternating current for their fundamental mode of operation
Hydraulics and Pneumatics • construct a cylinder and place a piston in it, maybe resulting in something not very different from a bicycle pump (see Fig. 3) When you pressurize the air or oil in one end of the cylinder, the piston will be forced away. see Fig. 3
There are essential differences between hydraulics and pneumatics. Air is much more compressible than oil, but has much less inertia. Pneumatics will therefore have the edge in situations where rapid acceleration is needed, but where the power is not large. Hydraulics will flex its muscles for the heavier tasks.
CH 7 -Logic systems Binary Numbers • In general, a number with a decimal point is represented by a series of coefficient as follows. a 5 a 4 a 3 a 2 a 1 a 0. a-1 a-2 a-3 • The aj coefficient are any of the 10 digits (0, 1, 2, . . . 9) and the subscript value gives the place value and hence, the power of 10 by which the coefficient must be multiplied. This can be expressed as:
• 105 a 5 + 104 a 4 + 103 a 3 + 102 a 2 + 101 a 1 + 100 a 0 + 10 -1 a-1 + 10 -2 a-2 + 10 -3 a-3 • The decimal system is said to be base or radix 10 because it uses 10 digits and coefficients are multiplied by powers of 10. • The binary system is a different number system. The coefficient of the binary numbers system have only two possible values: 0 or 1. Each coefficient aj is multiplies by 2 j. For example the decimal equivalent of the binary number 11010. 11 is 26. 75 as shown below: 1 × 24 + 1 × 2 3 + 0 × 2 2 + 1 × 2 1 + 0 × 2 0 + 1 × 2 -1 + 1 × 2 -2 = 26. 75
• In general, a number expressed in a base r system has coefficient multiplied by powers of r. an. rn + an – 1 rn – 1 +. . . + a 2 r 2 + a 1 r 1 + a 0 + a-1 r-1 + a-2 r-2 + a-mr-m • The coefficient aj range in value from 0 to r – 1 if the coefficient value for base 5 can only be 0, 1, 2, 3 & 4 the number system is a base 8 – system that has digits: 0, 1, 2, 3, 4, 5, 6, 7. • Eq. 127. 4 to determine its equivalent decimal value, we expand the number in a power series with a base of 8. (127. 4)8 = 1 × 82 + 2 × 81 + 7 × 80 + 4 × 8 -1 = (87. 5)10
• Note that digits 849 cannot appear in an actual number. • The letters of the alphabet are used to supplement the 10 decimal digits when the base of the number is greater than 10. For example in hexadecimal (base 16) number system the letters A, B, C, D, E & F are used for digits 10, 11, 12, 13, 14 and 15 respectively. • The digits in a binary number are called bits. When a bit is equal to 0, it doesn’t contribute to the sum during the conversion. • Eg. (110101)2 = 32 + 16 + 4 + 1 = (53)10
The 1 st 24 numbers obtained from 2 to the power of an are listed in the table below. N 2 n 0 1 8 256 16 65536 1 2 9 512 17 131072 2 4 10 1024 18 262144 3 8 11 2048 19 524288 4 16 12 4096 20 1048576 5 32 13 8192 21 2097152 6 64 14 16384 22 4194304 7 128 15 32768 23 8388608
In computer work 210 referred as k (kilo) 220 as M (Mega) 230 as G (Giga) 240 as T (tera) Thus 4 K = 212 = 4096 and 16 M = 224 = 16777, 216 • Computer capacity is usually given in bytes. A byte is equal to eight bitts and can accommodate one key board character. • A computer hard disk with 4 giga bytes of storage has a capacity of 4 G = 232 byte (approximately 10 billion bytes).
Equation of addition, subtraction & multiplication of two binary numbers: Addition Subtraction Multiplication
Number base conversion The binary equivalent of 41 is 101001.
Eg. 2 Convert (0. 6875)10 to binary 0. 6875 0. 3750 0. 7500 0. 5000 × × 1 2 2 2 = = 1. 3750 = 1 + 0. 3750 0. 7500 = 0 + 0. 7500 1. 5000 = 1 + 0. 5000 1. 000 = 1 + 0. 000 Therefore the binary equivalent of (0. 6875)10 is (0. 1011)2.
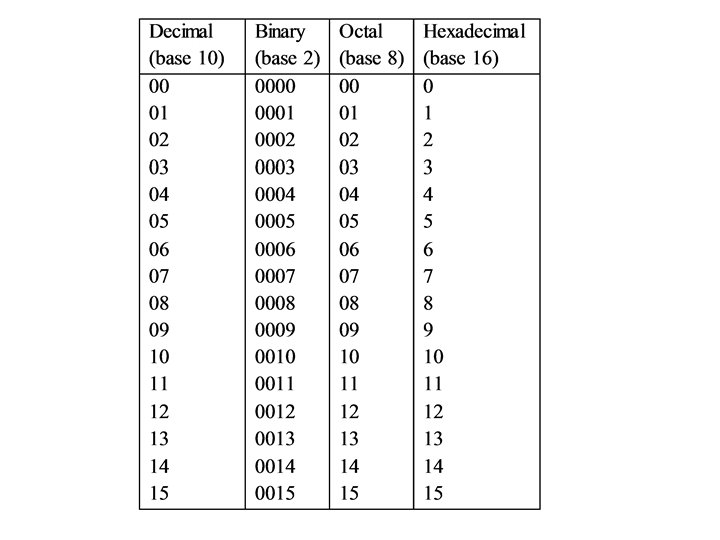
Octal and Hexadecimal numbers • The conversion from and to binary, octal, & hexadecimal plays an important role in digital computers. Since 23 = 8 & 24 = 16, each octal digit corresponds to three binary digits and each hexadecimal digit corresponds to four binary digits. • The 1 st 16 numbers in the decimal, binary, octal and hexadecimal number system are listed below.
• The conversion from binary to octal is easily accomplished by partitioning the binary number into groups of three digits each, starting from the binary point and proceeding to the left & to the right. Eg. 101100011111. 100000110 = (26153. 7 466)8