EMBEDDED DEFORMATION FOR SHAPE MANIPULATION Robert W Summer

EMBEDDED DEFORMATION FOR SHAPE MANIPULATION Robert W. Summer SIGGRAPH 2007 Presenter : 김 종 현 Johannes Schmid Mark Pauly

 versus 중심점 기준 회전 (pivot Point")
3 D ROTATION • 원점 기준 회전(Origin rotation) versus 중심점 기준 회전 (pivot Point Rotation) • 중심점 기준 회전
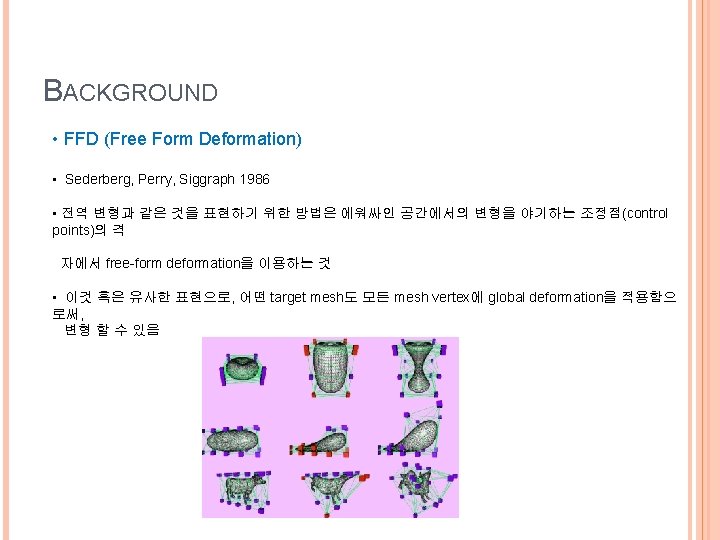

BACKGROUND • Direct manipulation of free-from deformations • 고정된 격자 구조는 최적화 되지 않는데, 왜냐하면 알맞게 크기가 결정된 격자는 모든 target mesh의 점에 대한 임의적인 비선형적 변형을 표현 못하기 때문 • Wires 고정 격자 한계! : A geometric deformation technique • Singh, Fiume, Siggraph 1998

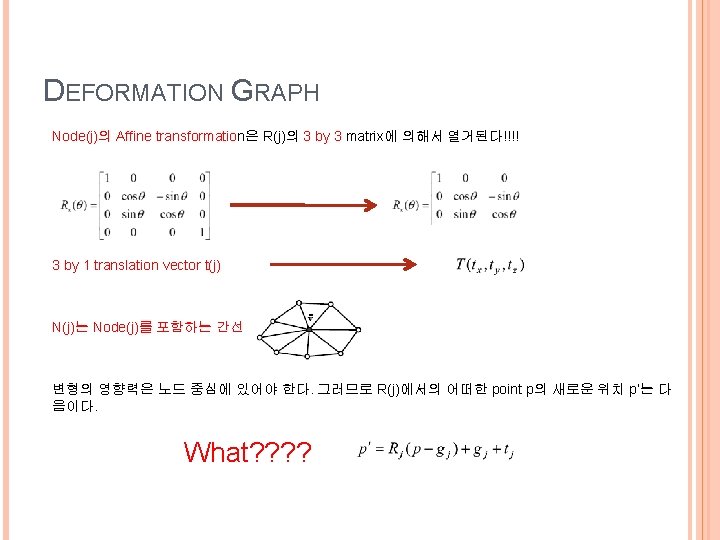
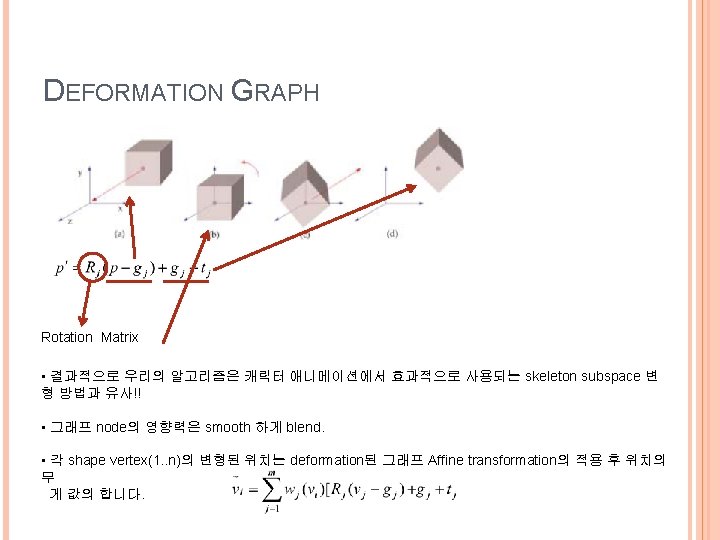
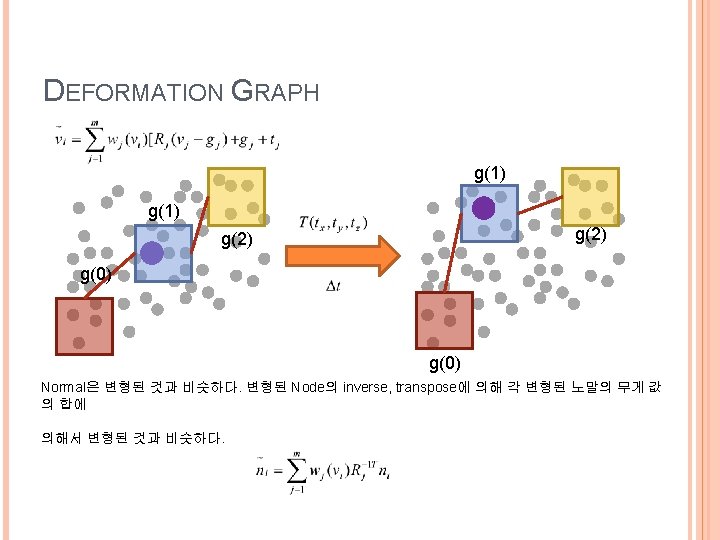
의 Affine transformation은 R(j)의 3 by 3 matrix에 의해서 열거된다!!!! g(j) +")
DEFORMATION GRAPH Node(j)의 Affine transformation은 R(j)의 3 by 3 matrix에 의해서 열거된다!!!! g(j) + t(j) 여기서 끝일까 ? ?
 Term은 deformation graph의 transformation 회전 error 의 합이다!! 만약")
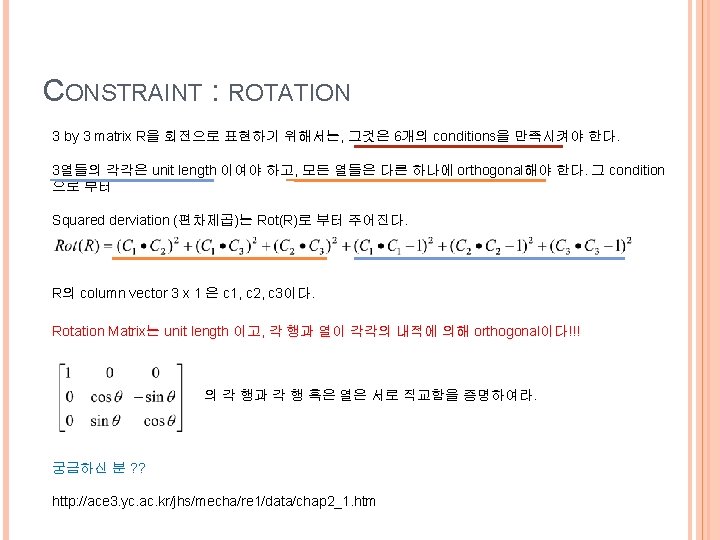
CONSTRAINT : ROTATION 그래서 E(rot) Term은 deformation graph의 transformation 회전 error 의 합이다!! 만약 Rotation Error 가 없다면 이 Rot(R)의 값은 0이다. Rotation Matrix의 내적은 : 0, unit length 이므로 1거기서 -1해주므로 0 그래서 최종 으로 0!!! • 각 축에 대해서 얼마나 회전 error • 자신의 길이 error
와 node(k)가 인접하다면, 그들은 embedded shape의 공통적인 부분집합에서 작용! Node(k)의")
CONSTRAINT : REGULARIZATION 만약 node(j)와 node(k)가 인접하다면, 그들은 embedded shape의 공통적인 부분집합에서 작용! Node(k)의 위치는 Node(j)의 Affine transformation으로부터 예보. k 현재 Node의 위치 인접해 있는 Node의 위치 j 현재 위치에서 deformation

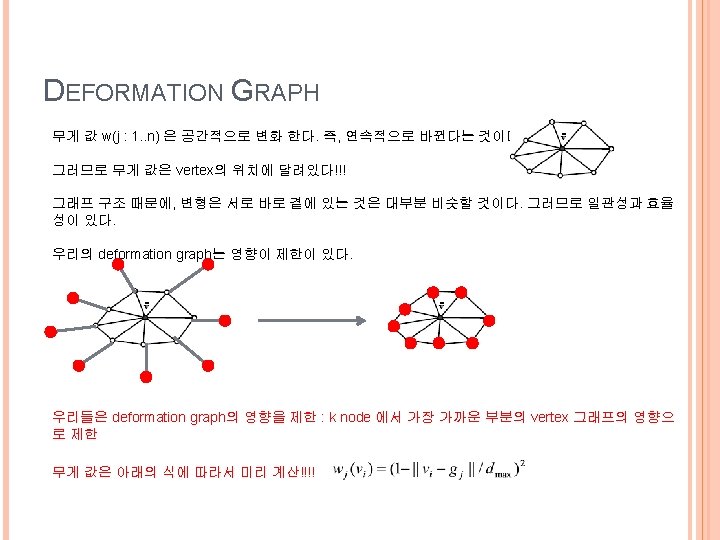
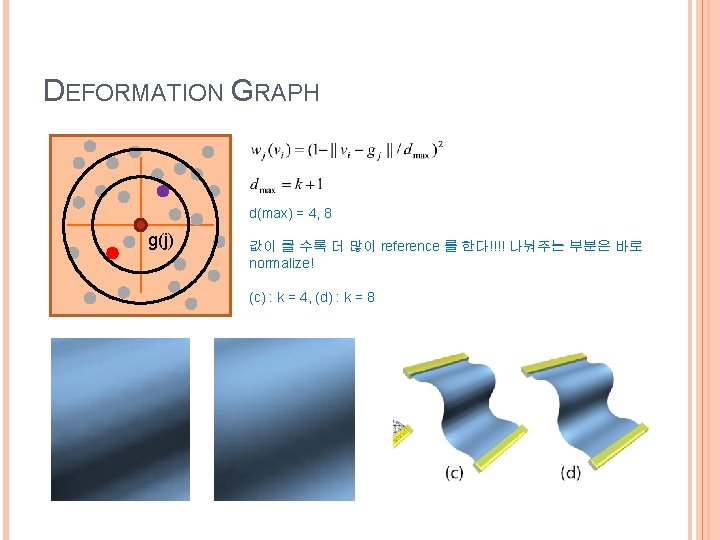
CONSTRAINT : REGULARIZATION k j k j K뒤에 Node가 더 있다고 한다면 ? ? j j k i k 무게 값 aik는 node(j)와 node(k)가 겹쳐진 영향력에 비례하는 값!! 하지만 많은 shape representation 동 안에 나쁘게 정의가 된다. (point based model, particle system) 우리는 무조건 1. 0!!!

OPTIMIZATION : NUMERICAL • 우리는 Gauss-Newton 알고리즘을 iterative해서 풀었다. 결과적으로 nonlinear least-squares 문제를 풀었다. • Gauss-Newton 알고리즘을 linearizses 했다. • 결국은 최소값을 찾기 위해서 least squares 를 사용한다. Fixed transformation Taylor 전개를 x에 대하여 풀면 다음과 같은 식이 나온다. 각 function에서 정의된 equation이다. (vector) 그래서

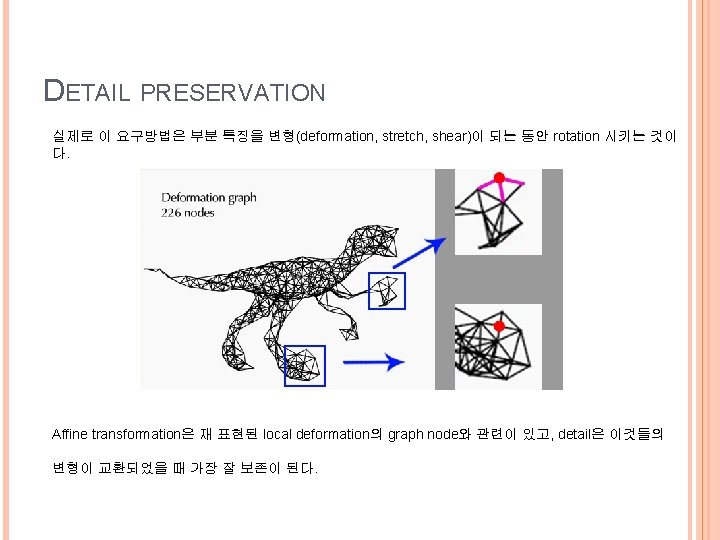
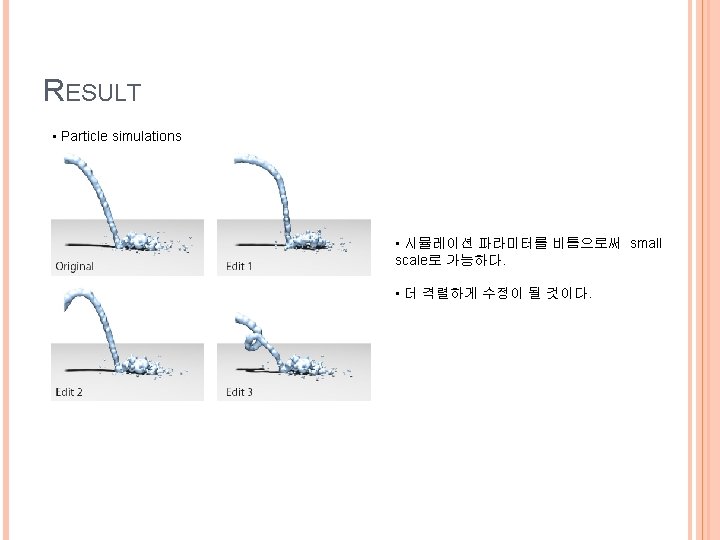
RESULT • Detail preservation • 적은 nodes 개수 • detail 을 보존

RESULT • Detail preservation
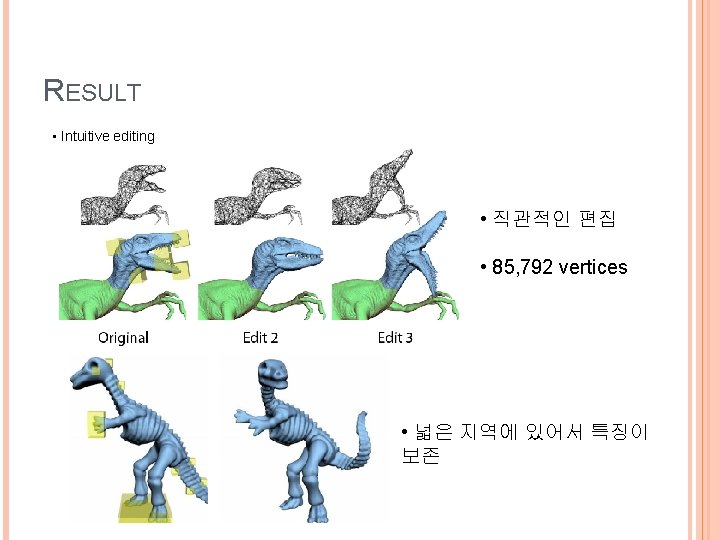
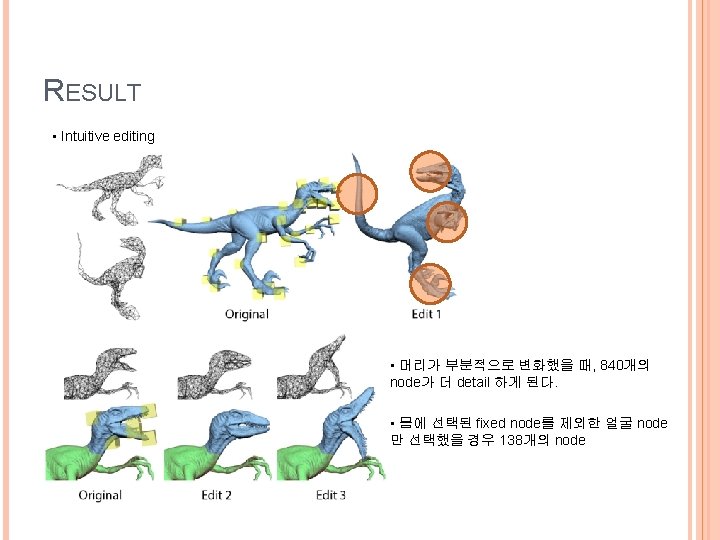

RESULT • Intuitive editing • 연결되지 않은 정보. 많은 hole and outlier • 전체 180개의 분리된 요소들 안에서 79, 226 vertices • deformation graph : 221 • 자동적으로 uniform sampling에 의해 자동적으로 만들어 진다.
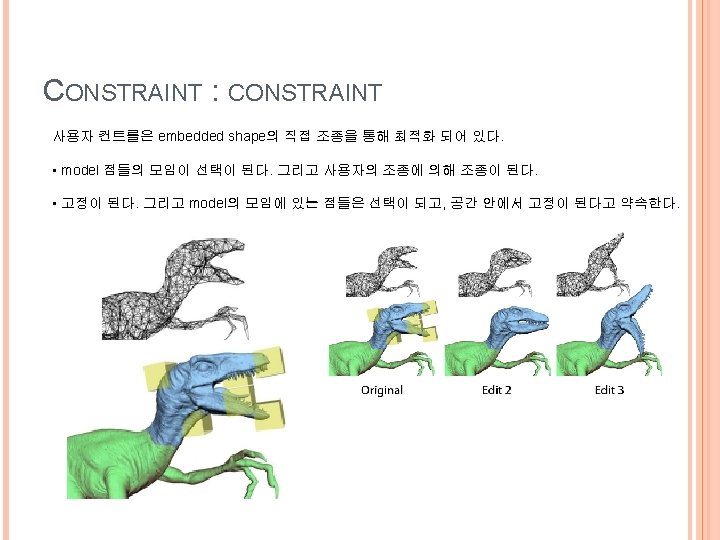
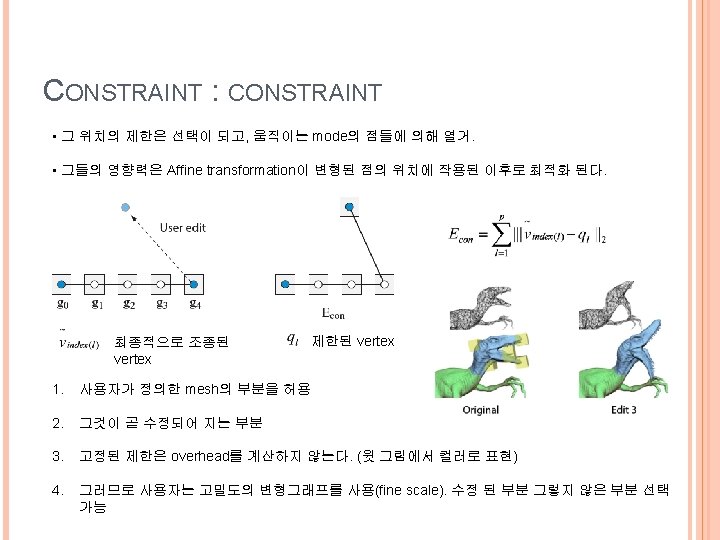
")
RESULT Ep 2는 s/w를 사용한다. Deformation graph 전달 • Efficiency Constraints된 통계적 수 (vertices) 각 Gauss-Newton iteration 이 요구하는 시간 : 20 ms ~ 30 ms

CHOLESKY

NEWTON RAPHSON
- Slides: 46