El Sistema de Posicionamiento GPS l Generalidades del










2 +")





 • La atmósfera perturba la")
 l DOP viene de “Dilución de la Precision”,")

 l. Las efemérides trasmitidas (broadcast), son calculadas")
 + M.")
 + M.")




 T 1 Ti Tiempo GPS d. T Generado en")


")
 = c. ** / => ** = . F")
 Modo observable precisión obs exactitud Posición C/A // 1")




. A")
 – DD(cal)0 = cof x. d. XA +")




-1. MT. L W tiene las tres incógnitas")
, los errores inducen a que N*")




 L 1")





 ds ( distancia ò n ds )")
 § f(L 1) = r. f 1/c - dion(L 1).")

 § f(L 1) = r. f 1/c - dion(L 1).")
 § f(L 1) = r. f 1/c - dion(L 1).")
 § f(L 1) = r. f 1/c - dion(L 1).")
 = r - dion(L 1) +e(f 1)")



 l dtro = ò (n-1) ds ( distancia ò n ds")
 l dtro = (2. 31 P + Kw )")








 l l l L 2 C (hay varios satélites")
 l l l L 5 es una nueva frecuencia")

 l Glonass es el equivalente ruso de")


 con las coord. del")



 C F Cj D F Dj * A F Aj")
- Slides: 87
El Sistema de Posicionamiento - GPS l Generalidades del sistema Principios del posicionamiento l Los observables l Posicionamiento aislado y relativo l l Posicionamiento relativo Combinación de observables l Ecuaciones de observación l La solución l Modalidades de observación l
Global Positioning System - GPS l l 24 satélites en órbitas altas (20 mil km de altura), en 6 planos inclinados a 55° respecto del ecuador. Cada satélite emite señales que se reciben en todo momento, con cualquier clima y desde cualquier lugar de la Tierra Posicionamiento Satelital
Los principios del posicionamiento Posicionamiento Satelital
Los principios del posicionamiento l. El sistema de control está constituido por un conjunto de estaciones permanentes con coordenadas bien conocidas en un sistema terrestre de referencia internacionalmente aceptado. Su misión es la de rastrear a todos los satélites para calcular las órbitas (efemérides) y controlar sus relojes. 1 M + 4 (Hawaii, Ascension Islands, Diego Garcia and Kawajalein) + 6 (2011) Posicionamiento Satelital
Los principios del posicionamiento l. El sistema de control está constituido por 1 M + 4 (Hawaii, Ascension Islands, Diego Garcia and Kawajalein) + 6 + 5 = 16 Posicionamiento Satelital
Los principios del posicionamiento During August and September 2005, six more monitor stations of the NGA (National Geospatial-Intelligence Agency) were added to the grid. Now, every satellite can be seen from at least two monitor stations. This allows to calculate more precise orbits and ephemeris data. For the end user, a better position precision can be expected from this. In the near future, five more NGA stations will be added so that every satellite can be seen by at least three monitor stations. This improves integrity monitoring of the satellites and thus the whole system. Estación de rastreo en Hawai Master control station” (Schriever AFB – Colorado) Posicionamiento Satelital
Los principios del posicionamiento l El sistema espacial está constituido por la constelación de satélites (nominalmente 24 activos). Cada satélite lleva a bordo varios relojes atómicos (5) para asegurar la exactitud de las marcas de tiempo y la estabilidad de la frecuencia de la señal emitida. GPS-Block IIF Satellite GPS-Block IIA Satellite Reloj atómico GPS-Block IIR and IIR-M (Block I, Block IIA, Block IIR und Block IIF). Primero a comienzos de 1978. Posicionamiento Satelital
Los principios del posicionamiento l Block I: 1978 – 1985. 11 Satélites l Block Il: 1990 – 1996. 9 Block II – 18 Block IIA (advanced). l Block IIR-M (replacement – modernized). L 2 c l Block IIF (L 5) l. Los usuarios equipados con receptores de las señales satelitales reciben simultáneamente las componentes de la señal que sirven para medir la distancia receptor-satélite, y el mensaje de navegación ppalmente. constituido por las efemérides que permiten calcular las coordenadas de los satélites. Posicionamiento Satelital
Los principios del posicionamiento Posicionamiento Satelital
Los principios del posicionamiento Posicionamiento Satelital
Los principios del posicionamiento Efemérides Observables Usuario Ri 2 = (Xi – Xu)2 + (Yi – Yu)2 + (Zi – Zu)2 (1) i = 1, 2, 3, . . . n l Cada satélite “observado” permite construir una ecuación de esta forma, y todas las ecuaciones de una época determinada constituyen un sistema de ecuaciones con tres incógnitas: las coordenadas del usuario Xu, Yu, Zu. Posicionamiento Satelital
Los errores Los principales errores S. A. Selective Availability Ionósfera Tropósfera Reloj local Órbitas Transm. Posicionamiento Satelital
Los errores Los principales errores l S. A. viene de Selective Availability y consiste en una degradación intencional de relojes y efemérides para usuarios “no calificados”. Desactivada !! l. La atmósfera introduce errores en la propagación de la señal de difícil modelización (orden metros) l El reloj del receptor debería estar sincronizado con el tiempo de los satélites. Se elimina agregando una nueva incógnita a la ecuación (1). Ri = ((Xi – Xu)2 + (Yi – Yu)2 + (Zi – Zu)2)½ + c. dt l Las órbitas trasmitidas son extrapoladas, introducen errores del orden del metro. Posicionamiento Satelital
La precisión aislada Precisión de una posición aislada l Antes del 2001 una sucesión de posiciones aisladas se circunscribía en un radio de decenas de metros. l Luego de la desactivación de la SA, prácticamente todas las posiciones están dentro de los 10 m Posicionamiento Satelital
El posicionamiento relativo l Los errores son comunes a las dos estaciones l La posición relativa resulta mucho más precisa que una posición aislada l Es necesario cocnocer las coordenadas precisas de una estación Posicionamiento Satelital
El posicionamiento relativo l. Los errores de los relojes satelitales afecta estríctamente igual a las dos estaciones, los errores en las efemérides (órbitas) son importantes si la distancia entre las estaciones es muy grande (más de 50 km). l. La atmósfera introduce errores muy similares para distancias de algunas decenas de km. Para distancias mayores es importante corregir este efecto. l. Es condición necesaria para alcanzar una solución apropiada contar con una buena posición de partida, de lo contrario, la precisión de la posición relativa resultará afectada según una regla aproximada: Error en la base => 1 PPM cada 10 m de error en las coordenadas de partida 1 ppm : 1 cm en 10 km Posicionamiento Satelital
El posicionamiento relativo Los efectos atmosféricos (Ionósfera y Tropósfera) • La atmósfera perturba la propagación de las señales GPS • Los efectos son diferentes en la Ionósfera (capa superior por encima de 60 km) y en la Tropósfera (capa inferior hasta 20 km) l La ionósfera afecta a las señales en forma inversamente proporcional a la frecuencia de las mismas. Esto permite eliminar su efecto combinando las componentes de las señales GPS en las dos frecuencias posibles L 1 y L 2. Para ello es necesario utilizar receptores de “doble frecuencia”. l La tropósfera (baja atmósfera) introduce errores importantes al producir un retardo en la señal. Se modeliza muy aceptablemente la componente seca y con más incertidumbre la componente húmeda (influencia del vapor de agua en el camino de la onda). l. Afecta principalmente la determinación de alturas con GPS. Posicionamiento Satelital
El posicionamiento relativo La Geometría (PDOP) l DOP viene de “Dilución de la Precision”, es decir, que es un factor que multiplica a la precisión de las mediciones desmejorando la precisión real. l Cuanto mayor es el PDOP más desfavorable es la situación. l Este es un indicador que puede predecirse con una planificación apropiada. l Otros indicadores son HDOP, VDOP, TDOP Posicionamiento Satelital
El posicionamiento relativo Trayectorias PDOP vs. Número de satélites Posicionamiento Satelital
El posicionamiento relativo Las Efemérides GPS (órbitas) l. Las efemérides trasmitidas (broadcast), son calculadas por el sistema oficial de control de GPS en base al rastreo de todos los satélites, y resultan de la extrapolación de las órbitas ajustadas para que los usuarios puedan disponer de las posiciones de los satélites en tiempo real. La precisión de estas efemérides es de algún metro. l. Las efemérides precisas son calculadas por el Servicio GNSS Internacional (IGS) y son accesibles posteriormente y por internet con alguna demora. Estas órbitas tienen una precisión de pocos cm y resultan del AJUSTE de un arco observado y NO de una predicción. • Las Efemérides Transmitidas en Tiempo Real son EXTRAPOLADAS • Para trabajos de alta precisión deben utilizarse las EFEMERIDES PRECISAS • Se avanza a efemérides predichas precisas en tiempo cuasi real Posicionamiento Satelital
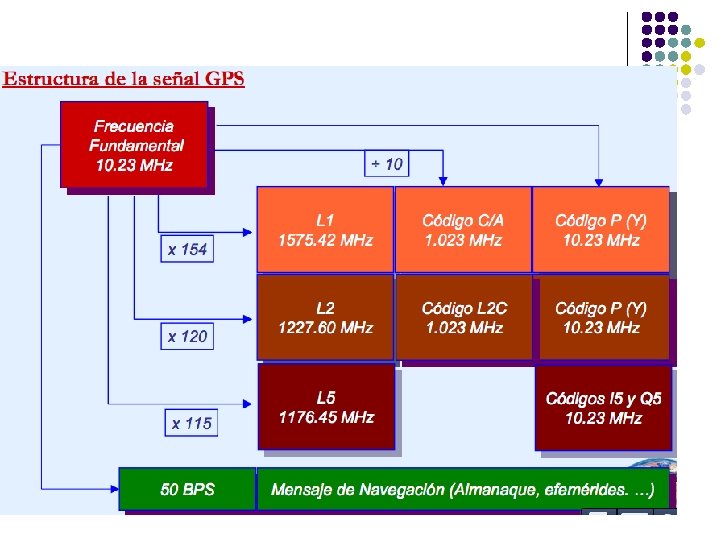
La señal GPS L 1 = M. C/A. sen (w 1 t) + M. P 1. cos (w 1 t) L 2 = M. P 2. sen (w 2 t) Posicionamiento Satelital
La señal GPS L 1 = M. C/A. sen (w 1 t) + M. P 1. cos (w 1 t) L 2 = M. P 2. sen (w 2 t) Ø M: mensaje de navegación, contiene ppalmente. las efemérides trasmitidas. Ø C/A: código COARSE ACQUISITION para la medición rápida del Pseudo Range (o pseudo distancia) entre el satélite y el receptor. Todos los receptores miden Pseudo Range. Ø w 1 = pulsación de la frec. L 1. Los receptores de simple frecuencia recuperan la fase de la onda Sin (w 1. t). Ø P 1: código PRECISO en la señal L 1. Solo los receptores más sofisticados acceden al código P. Ø w 2 = pulsación de la frec. L 2. Solo los receptores de doble frecuencia recuperan la fase de la onda Cos (w 2. t). Ø P 2: código PRECISO en la señal L 2. Solo los receptores más sofisticados acceden al código P. Posicionamiento Satelital
Los Observables • C/A tiene una Long. de onda de aprox. 300 m. • La precisión: 0. 5 a 0, 3 m • P tiene una Long. de onda de aprox. 30 m. • La precisión: 0. 3 m • L 1: tiene una Longitud de onda de aprox. 20 cm • L 2: tiene una Longitud de onda de aprox. 24 cm • La precisión: 2 mm Posicionamiento Satelital
Los Observables • C/A tiene una Long. de onda de aprox. 300 m. • La precisión: 3 a 0. 5 m El código C/A es un código pseudo aleatorio (pseudo random - PRN) transmitido con una frecuencia de 1. 023 MHz, que luce como un código aleatorio, pero que responde a un patrón muy bien definido. Se repite cada 1023 bits o cada milisegundo. Cada milisegundo se generan 1023000 chips. Considerando la vel de la luz, la longitud de cada chip es de 300 m (long de onda asociada). Los satélites son identificados por el receptor a través del PRN-number • P tiene una Long. de onda de aprox. 30 m. • La precisión: 0. 3 m El código C/A es la base para los receptores civiles. El código P (precise) modula sobre L 1 y L 2 y es un muy largo código pseudo aleatorio de 10. 23 MHz. Tiene un período de 266 días pero se utilizan tramos de solo 7 días. Este código es encriptado (por seguridad) y transmitido como código Y (AS : anti-spoofing ). Posicionamiento Satelital
Los Observables • L 1: tiene una Longitud de onda de aprox. 20 cm • L 2: tiene una Longitud de onda de aprox. 24 cm • La precisión: 2 mm Los recptores civiles usan la frecuencia L 1 de 1575, 42 MHz (long onda 19, 05 cm). L 1 transporta la información de navegación y el código SPS (standard positioning code). La frecuencia L 2 de 1227, 60 MHz (long onda 24, 45 cm) solo transporta el código P y es utlizada por receptores con el servicio PPS (precision positioning code). Posicionamiento Satelital
Los Observables Principio de la Observación de Distancias con Códigos T 1 Ti Tiempo GPS Generado en el Satélite Generado en el Receptor Recibido en el Receptor : Cantidad Observada = c. Distancia Satélite-Receptor Observada Posicionamiento Satelital
Los Observables Pseudo Distancia (range) T 1 Ti Tiempo GPS d. T Generado en el Satélite Generado en el Receptor Recibido en el Receptor o + d. T : Cantidad Observada r= c. ( o + d. T ) = c. o + c. d. T: Error del reloj local Pseudo Range Observada Posicionamiento Satelital
Los Observables Proceso de Autocorrelación El receptor mide electrónicamente lo que debe desplazar la señal para producir la coincidencia Posicionamiento Satelital
Los Observables Mediciones de diferencias de Fase Tiempo GPS Generado en el Satélite d. T Generado en el Receptor Recibido en el Receptor : Cantidad Observada d. T: Error del reloj local Posicionamiento Satelital
Los Observables Generado en el Receptor * Recibido en el Receptor F ( ) : Cantidad Observada o F ( *) difieren en un ciclo, en gral, N ciclos ] d. T: Error del reloj local, el retardo o * se calculan a partir de F = c. ( - d. T ) o bien * = c. ( * - d. T ) en gral ** = c. ( ** - d. T ) Posicionamiento Satelital
Los Observables F ( **) = c. ** / => ** = . F / c ** = c. ( ** - d. T ) = F. - c. d. T =>> = ** + N. con lo cual = F. - c. d. T + N. donde N es una ambigüedad Posicionamiento Satelital
Exactitud de los resultados (coordenadas) Modo observable precisión obs exactitud Posición C/A // 1 a 3 m // 3 a 10 m fases // 2 mm // 3 a 10 m C/A // 1 a 3 m fases // 2 mm Aislada Posición Relativa Posición // centímetros relativa Posicionamiento Satelital
Combinaciones de Observables Combinación de observables Simples diferencias j Obs Aj Obs Bj Satélite j Estaciones A y B SD(A, B, j) = Obs Aj – Obs Bj Se elimina lo que es común en j (en el satélite): principalmente los errores orbitales, los errores en los relojes de los satélites, los errores atmosféricos se minimizan si A es próximo a B A B Posicionamiento Satelital
Combinaciones de Observables Dobles diferencias k Obs Bk j Obs Ak Satélites j y k Estaciones A y B DD(A, B, j, k) = SD(A, B, j)-SD(A, B, k) Obs Bj DD = ( Obs Aj – Obs Bj ) - ( Obs Ak – Obs Bk ) Obs Aj A Se elimina también lo que es común en A y en B: principalmente los errores en los relojes de los receptores. B Posicionamiento Satelital
Combinaciones de Observables k Dobles diferencias de códigos {Obs = } Obs Bk j Obs Ak Obs Bj Satélites j y k Estaciones A y B DD = ( Aj- Bj) – ( Ak- Bk) = c. [( Aj – d. TA )– ( Bj – d. TB )] – c. [( Ak – d. TA) – ( Bk – d. TB )] Obs Aj A + Ion + Trop + B Posicionamiento Satelital
Combinaciones de Observables Dobles diferencias de fases {Obs = f} k Obs Bk j Obs Ak Satélites j y k Estaciones A y B DD = ( Aj- Bj) – ( Ak- Bk) = Obs Bj (. f. Aj – c. d. TA) – (. f. Bj – c. d. TB) – (. f. Ak – c. d. TA) + (. f Bk – c. d. TB ) + . [( NAj – N Bj )+ (NBk – NAj)] + Ion + Trop + Obs Aj El último [ ] encierra un número entero combinación de las ambiguedades individuales A B Posicionamiento Satelital
Ecuaciones de observación Analicemos el primer término de las SD ( A ). A través de un desarrollo en series de Taylor: Para F= y cj = x, y, z de la estación incógnita. j cj – c 0 = x – x 0 = dx … dy, dz Aj Bj A Ahora consideremos d. XB = 0 Con lo que la ecuación de observación de simples diferencias: Aj – Bj = 0 Aj – 0 Bj + cof x. d. XA + cof y. d. YA + cof z. d. ZA Posicionamiento Satelital B
Ecuaciones de observación En general: DD(obs) – DD(cal)0 = cof x. d. XA + cof y. d. YA + cof z. d. ZA + . [( NAj – N Bj )+ (NBk – NAj)] + T + Ion + Trop + Considerando eliminados los efectos atmosféricos y relojes j k DD(obs) – DD(cal)0 = cof x. d. XA + cof y. d. YA + cof z. d. ZA + . N + Obs - Cal = cof x. d. XA + cof y. d. YA + cof z. d. ZA + . N + Consideremos: * 6 Satélites * 1 Observación cada 15 segundos • 1 hora de observación continuada desde 2 receptores operando simultáneamente. A Posicionamiento Satelital B
Ecuaciones de observación Ejemplo de la observación simultánea de 2 receptores : • 6 Satélites • 1 Observación cada 15 segundos • 1 hora de observación continuada desde 2 receptores operando simultaneamente • Un satélite es tomado como referencia (ej. el “k” ) * En un instante (cada 15 seg) es posible construir 5 (6 -1) observaciones de Dobles Diferencias. • En 1 hora se dispondrá de n=1200 (4*60*5) ecuaciones de Dobles Diferencias. * Las incógnitas serán: d. XA d. YA d. ZA Njk Nnk Nsk Nrk Ntk ( m=8) Posicionamiento Satelital
La Solución cof*x d. XA + cof*y d. YA + cof*z d. ZA + . N Aj-Bj-Ak+Bk = (O – C) Aj-Bj-Ak+Bk M W = L M es la matriz de los coeficientes (Nro de Obs x Nro de Incóg). Tiene tantas filas como resulten del número de satélites – 1 (5) por el número de épocas y 8 columnas (para el ejemplo hay 5 ambigüedades distintas y 3 inc. de posición) W es la matriz de las incógnitas (columna) W = (d. XA, d. YA, d. ZA, N 1, N 2, N 3, N 4, N 5)T (si el número de satélites cambia se agregan nuevas ambigüedades) L es el vector (O-C) contiene las observaciones O y los modelos con los que se aproxima la observación C (tiene el mismo número de filas que M) Posicionamiento Satelital
La Solución Se trata de un sistema con más ecuaciones que incógnitas. Una posibilidad es resolverlo con el método de los mínimos cuadrados, que para una distribución normal de errores aleatorios (de las observaciones) provee los mejores estimadores de las incógnitas y sus errores, minimizando la suma de los cuadrados de los residuos. M. W = L MT. M. W = MT. L MT es la matriz traspuesta de M Es un sistema normal con igual número de incógnitas que de ecuaciones (se puede resolver) Formalmente se puede invertir MT. M W = (MT. M)-1. MT. L Que es la solución del problema ! Posicionamiento Satelital
La Solución Si Wc es el conjunto de incógnitas “calculadas” por el proceso anterior, su multiplicación por M produce un vector Lc calculado M. Wc = Lc La diferencia entre los originales L y los calculados a partir de las incógnitas Wc V = L – Lc es el vector de los residuos que deja cada ecuación respecto de la solución calculada. La varianza se obtiene de VT. V s 2 = VT. V / (n - m) s es el error medio cuadrático (RMS) Posicionamiento Satelital
Solución - Comentarios W = (MT. M)-1. MT. L W tiene las tres incógnitas de posición (que son las que interesan) y todas las combinaciones de ambigüedades necesarias a lo largo de la observación. DOP = Traza de la matriz Varianza-Convarianza Cada nuevo satélite que se incorpora a las observaciones agrega 1 nueva ambigüedad La primera solución será “flotante”, esto quiere decir que aunque es sabido a priori que las N son enteras, esto no resultará de la solución, en la que las primeras N serán nros. reales. Comienza un complejo proceso de búsqueda de soluciones “fijas” Posicionamiento Satelital
Solución - Comentarios En la primera solución (flotante), los errores inducen a que N* = Nver + d. N Siendo N* la que se obtiene del cálculo, Nver la verdadera solución entera d. N el resultado de una combinación de errores El proceso de decidir cual es la Nver a partir de N* y el error estimado para dicha incógnita e. N* puede ser complejo y demandar la mayor parte del tiempo de cálculo de una base. Solo para fijar ideas, supongamos N* = 500, 11 y e. N* = 0. 10. Si suponemos que el valor verdadero está en un intervalo de N* + 3 e. N* a N* - 3 e. N* proponemos Nver = 500 Entre 500. 41 y 499. 81 solo cae un entero => 500 La suposición fue correcta, se dice que la ambigüedad ha sido resuelta o fijada. Pero que pasaría si N* resultara = 500. 45 ? ? O si e. N* = 0, 3 ? ? (HASTA ACÁ) Posicionamiento Satelital
Solución - Comentarios Una vez fijadas satisfactoriamente todas las ambigüedades j como números enteros se resuelve nuevamente: k W = (MT. M)-1. MT. L Pero ahora W = (d. XA, d. YA, d. ZA)T El sistema a resolver tiene solo 3 incógnitas !! Cuando se han resuelto satisfactoriamente todas las ambigüedades se dice que la solución es FIJA Cuando una o más ambigüedades permanecen como números reales se dice que la solución es FLOTANTE A B Posicionamiento Satelital
Los Observables j 0 k 1 k 0 j 1 Si las posiciones representadas en la figura corresponden a épocas consecutivas t 0 y t 1 K 0 = K(t 0) , K 1= K(t 1) Y lo mismo para J Es posible construir una combinación auxiliar que se llama “triples diferencias” que se arma a partir de restar ecuaciones de dobles diferencias para épocas consecutivas Las ecuaciones de triples diferencias no tienen ambigüedades, es esto una ventaja ? A B Posicionamiento Satelital
Solución - Comentarios k 1 Las ecuaciones de triples diferencias no tienen ambigüedades, es esto una ventaja ? NO ! k 0 1. El hecho que las ambigüedades sean enteras es un dato que robustece la solución porque estamos agregando información al sistema. 2. La combinación de triples diferencias produce ecuaciones muy correlacionadas. 3. Pero tienen una utilidad muy importante para detectar saltos de ciclo cuando se pierde la señal por unos instantes. “Cycle slips”. A B Posicionamiento Satelital
Solución - Comentarios j k 1. En gral. el procesamiento se hace comenzando por una solución de códigos que provee una solución aprox. X 0, Y 0, Z 0 y los Errores de Reloj. 2. Continúa con una solución de triples diferencias para detectar y reparar ciclos perdidos. 3. Luego se realiza una solución de dobles diferencias flotante. 4. Comienza el proceso para fijar ambigüedades. A B 5. Solución final de dobles diferencias: “fija” si el punto 4 fue exitoso, “flotante” en caso contrario. Posicionamiento Satelital
Técnicas de los receptores La L 2 y el código P (1) L 1 = M. C/A. sen (w 1 t) + M. P 1. cos (w 1 t) L 2 = M. P 2. sen (w 2 t) 1. El código P sufre una encriptación para convertirse en código Y. Se llama AS (anti spoofing) y tiene el objetivo de impedir falsificaciones. 2. El código Y no es conocido para usuarios civiles, luego la L 2 no puede obtenerse directamente decodificando el código P. 3. Pero Y es el mismo en L 1 y L 2 !! 4. “Cross correlation” implica correlacionar L 1 con L 2 para obtener diferencias de fase (L 1 - L 2) y diferencias de código (P 1 - P 2) en L 2 (es la técnica de Trimble). 5. “P-W tracking”: el código Y se obtiene multiplicando el código P por otro W que tiene una frecuencia menor. Es decir que hay tramos intactos del código P original. Esta técnica es capaz de medir fases y códigos en los tramos no afectados Posicionamiento Satelital
Observables - Comentarios La L 2 y el código P 1. La L 2 tiene una importancia capital cuando la base se alarga (porque permite eliminar los efectos ionósfericos). 2. El código P (o una estimación de él) medido en ambas frecuencias, P 1 y P 2, tiene una importancia enorme en algunos métodos estáticos rápidos o procesos de inicialización, porque permite decorrelacionar los efectos inosféricos de la estimación de ambigüedades. Posicionamiento Satelital
Técnicas de observación Estático clásico k j l. Los receptores permanecen fijos en A y en B durante toda la observación. l. A posteriori, las observaciones registradas se procesan en forma conjunta en una computadora. l. Dependiendo de la precisión buscada, el tiempo de permanencia varía desde 40 min a horas o días. l. Las precisiones típicas son de 1 cm + 1 ppm en las coordenadas horizontales y algo peor en altura. A Dx Dy Dz B Posicionamiento Satelital
Técnicas de observación Cinemático y RTK Punto de la Red Geodésica Punto de Referencia en la zona de Trabajo ØMétodo cinemático (stop and go y/o continuo): un receptor permanece fijo en una estación de coordenadas conocidas y el segundo se desplaza deteniéndose brevemente en los puntos a posicionar (Stop & Go). . Los receptores modernos tienen inicialización OTF (On The Fly) ----- INICIALIZACION -----Ø La técnica descripta puede aplicarse para obtener resultados en tiempo real (RTK: Real Time Kinematics) para lo cual es necesario agregar un transmisor en la estación base y un receptor en el equipo móvil. Posicionamiento Satelital
Propagación l ü ü Ionósfera: desde 50 a 1000 km aprox. Causa: ionisación de las capas superiores de la atmósfera por radiación solar Efecto: modifica la velocidad de propagación en función de la frecuencia Troposfera: desde 0 a 8 km de altitud aprox. (la estratósfera se extiende más o menos hasta 50 km) Causa: refracción en la atmósfera neutra Efecto: retardo de la señal en función de las variables: presión, temperatura, y contenido de vapor de agua
Ionósfera: desde 50 a 1000 km l v = c / n (n = 1, v = c y todos felices. . . ) l n(pr) = 1 + a. Ne / f 2 n(fa) = 1 - a. Ne / f 2 l l l Pseudo Range n > 1 dion es positivo Fases n < 1 dion es negativo
Ecuaciones básicas l dion = ò (n-1) ds ( distancia ò n ds ) l dion = 40, 28. STEC / f 2 (= 40, 28. VTEC. F(Z) / f 2 ) l dion = - fion. c / f ( d metros, f ciclos ) l f. L 1 2. dion (L 1) = f. L 2 2. dion (L 2)
L 3 (“iono free”) § f(L 1) = r. f 1/c - dion(L 1). f 1/c + n(L 1) + e(f 1) § f(L 2) = r. f 2/c - dion(L 2). f 2/c + n(L 2) + e(f 2) § f(L 3) = f 1. f(L 1) - f 2. f(L 2) ( libre de ionósfera !!) § Problema: la ambigüedad de L 3 no es entera, de manera que una solución de la combinación L 3 está libre de errores ionosféricos pero no puede aprovechar el concepto de ambiguedades fijas (enteras).
Resumen ionósfera l l Max. Cenit 30 m, horizonte 90 m Durante el día 5 a 10 veces > a la noche Obedece al ciclo solar de 11 años Opciones: posicionamiento diferencial, modelar, usar doble frecuencia.
L 4 (“geometry free”) § f(L 1) = r. f 1/c - dion(L 1). f 1/c + n(L 1) + e(f 1) (* c/f 1) § f(L 2) = r. f 2/c - dion(L 2). f 2/c + n(L 2) + e(f 2) (* c/f 2) § F(L 4) = F(L 1) - F(L 2) ( libre de geometría !!) § F(L 4) = (l 1 n(L 1) – l 2 n(L 2) ) + dion(L 1) - dion(L 2) § El primer término es constante, de manera que la variación de la L 4 es la variación de dion = 0, 646 dion(L 1) !! § (en las ec. se elim. relojes y tropósfera por simplicidad)
L 5 (“wide lane”) § f(L 1) = r. f 1/c - dion(L 1). f 1/c + n(L 1) + e(f 1) § f(L 2) = r. f 2/c - dion(L 2). f 2/c + n(L 2) + e(f 2) § f(L 5) = f(L 1) - f(L 2) ( longitud de onda efectiva l 5=86 cm !!) § F(L 5) = r + (f 1/f 2). dion(L 1) + l 5 n 5 (F(L 5) = l 5. f(L 5) ) § n 5 es más fácil de resolver !! ( n 5 = n 1 – n 2) § P(L 5) = r - (f 1/f 2). dion(L 1) ( análogamente )
L 6 (“narrow lane”) § f(L 1) = r. f 1/c - dion(L 1). f 1/c + n(L 1) + e(f 1) § f(L 2) = r. f 2/c - dion(L 2). f 2/c + n(L 2) + e(f 2) § f(L 6) = f(L 1) + f(L 2) ( longitud de onda efectiva l 6=11 cm ) § F(L 6) = r - (f 1/f 2). dion(L 1) + l 6 n 6 (F(L 6) = l 6. f(L 6) ) § n 6 es más difícil de resolver !! ( n 6 = n 1 + n 2) § P(L 6) = r + (f 1/f 2). dion(L 1) ( análogamente )
Combinaciones códigos - fases § F(L 1) = r - dion(L 1) +e(f 1) § F(L 2) = r - dion(L 2) +e(f 2) § P(L 1) = r + dion(L 1) + e(P 1) § P(L 2) = r + dion(L 2) + e(P 2)
Pseudo range y fases para la resolución de ambigüedades y la eliminación de la ionósfera l l Las 4 ecuaciones básicas de la diapo anterior muestran que existen cuatro ecuaciones que pueden combinarse para lograr aislar las ambigüedades en ambas frecuencias, el efecto de la ionósfera y el término que contiene la geometría (las incógnitas de posición). Así la designación IONO FRE FIXED para una solución determinada quiere decir que se han resuelto satisfactoriamente todos estos factores.
Pseudo range y fases para la resolución de ambiguedades y la eliminación de la ionósfera • ejercicio: • poner F(L 4) en función de P (L 4) y lo quede, poner F(L 5) en función de P (L 5) y lo quede • Con lo que resulta, combinar de manera de despejar explícitamente n(L 1) y n(L 2). • Con la F(L 4) obtener dion (L 1) • Discutir una solución de f(L 1)
Propagación l ü ü Ionósfera: desde 50 a 1000 km aprox. Causa: ionisación de las capas superiores de la atmósfera por radiación solar Efecto: modifica la velocidad de propagación en función de la frecuencia Troposfera: desde 0 a 8 km de altitud aprox. (la estratósfera se extiende más o menos hasta 50 km) Causa: refracción en la atmósfera neutra Efecto: retardo de la señal en función de las variables: presión, temperatura, y contenido de vapor de agua
Ecuaciones básicas (Hopfield) l dtro = ò (n-1) ds ( distancia ò n ds ) l dtro = Kd/sin(E 2+6. 25)0. 5+Kw/ sin(E 2+2. 25)0. 5 l Kd = f(P/T) efecto total seco en la dirección cenital l Kw = g(e/T 2) efecto total húmedo en la dirección cenital l E: elevación del satélite, P: presión, T: temperatura, e: presión de vapor de agua
Ecuaciones básicas (Black aprox. ) l dtro = (2. 31 P + Kw ) / sin (E) l Donde P es la presión en superficie en hectopascales y Kw se calcula a partir de una atmósfera estandar. Valores típicos: Kw = 0. 28 latitudes medias verano Kw = 0. 20 latitudes medias primavera/otoño Kw = 0. 06 latitudes medias invierno
Resumen tropósfera • • Max. Cenit 2. 5 m, horizonte 25 m 90% componente seca, modelable 10% componente húmeda, más impredecible Castiga más a la h (atención bases con Dh grandes) • Opciones: posicionamiento diferencial, modelar, estimar un parámetro para ajustar el modelo.
Tropòsfera, modelo aprox. de Black para una atmósfera estandar y elevaciones > 30º • ejercicio: • Utilizando las expresiones aproximadas de Black, y suponiendo un error del 20% en los Kw utilizados, calcule el error en la estimación del retardo troposférico para los casos siguientes: • Verano, en latitudes medias • Invierno, en latitudes medias • En los dos casos para satélites con elevaciones de 90º, 45º, 15º
El futuro de GPS y técnicas especiales en desarrollo
Exactitud de los resultados: resumen Modo observable precisión de la medida exactitud resultado Posición C/A Aislada // 1 a 3 m // 3 a 10 m Posición Aislada fases // 2 mm // 3 a 10 m Posición Relativa C/A // 1 a 3 m Posición Relativa fases // 2 mm // centímetros L 1 hasta 20/30 km L 1+L 2 distancias mayores
La Señal GPS – Los Observables • C/A tiene una Long. de onda de aprox. 300 m. • La precisión: 3 a 0. 5 m • P tiene una Long. de onda de aprox. 30 m. • La precisión: 0. 3 m • L 1: tiene una Longitud de onda de aprox. 20 cm • L 2: tiene una Longitud de onda de aprox. 24 cm • La precisión: 2 mm
Estado actual l Señales en L 1 y L 2 l Código C/A en L 1 de libre disponibilidad l Código P en L 1 y L 2 encriptado el código l Acceso a L 2 con estrategias propias de cada receptor c/pérdida en la relación señal/ruido
Las mejoras en las señales l l l Incorporación de una señal L 2 C (C de Civil) no encriptada a partir de los satélites del Bloque IIR M Incorporación de una señal L 5 de libre disponibilidad a partir de los satélites del Bloque II F En estudio una nueva señal L 1 C, Bloque III
Los planes en el tiempo
Que significarán estos cambios (1) l l l L 2 C (hay varios satélites operativos) Modelado inosférico a partir de la combinación de L 1 -L 2 C a partir de receptores sencillos que no necesitarán técnicas particulares para recuperar la L 2. Mejor perfomance con señales débiles, no porque sea más fuerte la señal sino por una mejor estructura de la misma lo que permite ser seguida en peores condiciones.
Que significarán estos cambios (2) l l l L 5 es una nueva frecuencia en 1176 Mhz. L 5 es 4 veces más potente que L 2 C y tiene una estructura mejorada lo que facilita su recepción en cualquier situación. Una tercera frecuencia disponible facilitará la eliminación del efecto de la ionósfera en las señales GPS.
GNSS: GPS + Glonass + Galileo l IGS es hoy el international GNSS service l GNSS: Global Navigation Sat. Sys. Hoy: GPS + GLONASS (la página del IGS contiene datos sobre ambos sistemas) Futuro: + Galileo + …. l l
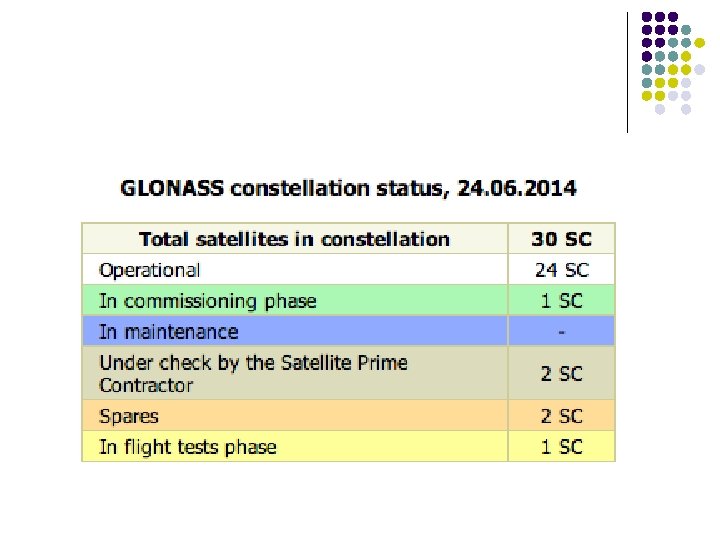
GNSS: GPS + Glonass + Galileo (2) l Glonass es el equivalente ruso de GPS l Similar a GPS Se acomodan en 3 planos orbitales a 65. 8° 25510 km de radio, período 11 hs 16 min L 1: 1602 Mhz L 2: 1246 Mhz Código C/A en L 1, código P en L 1 y L 2 Receptores GPS + Glonass = mayor número de satélites especialmente apropiados para lugares con obstrucciones l l l
GNSS: GPS + Glonass + Galileo l Galileo es el equivalente europeo de GPS l Desde dic. 2005. Hoy ? ? ? (Averiguar) Futuro: 30 satélites Se acomodan en 3 planos orbitales a 56° 23222 km de radio Open service OS (4 m) L 1: 1164 Mhz, L 2: 1214 Mhz Commercial Service CS (1 m) agrega L 3: 1300 Mhz l l l
Algunas técnicas especiales l Estaciones bases y/o red permanente: l Proveer datos (un servidor del que uno se baja los datos que necesita) Proveer servicios (un centro de cálculo que provee órbitas mejoradas, correcciones para la ionósfera, etc. ) Algunos ejemplos en tiempo real: clásico DGPS, RTK, última generación VRS l l
DGPS clásico l Estación base: coordenadas conocidas (Xe, Ye, Ze) con las coord. del satélite se calcula: l Distancia sat-rec se expresa como: l D = { (Xs – Xe)2 + (Ys - Ye)2 + (Zs - Ze)2 } ½ También se calcula el “error de Reloj Local” l Supongamos PRo el pseudo range observado para ese satélite, la diferencia entre D – PRo = DPR que es una corrección al pseudo range observado.
DGPS clásico l Qué contiene DPR ? l DPR = error en la órbita, error ionósfera, error tropósfera >>> en la base l DPR se transmite a la estación remota l Allí se calcula D = PRo + DPR Con este, se calculan las coordenadas y el error del Reloj Local l Si la remota está próxima a la base, la solución de coordenadas y relojes estará libre de órbitas, ionósfera y tropósfera l La corrección no es instantánea pero en la base se puede calcular también su variación entre dos mediciones consecutivas y enviar DPR y su variación DPR l Así la corrección en la estación remota se calcula como DPR + DPR (dt) siendo dt el intervalo de tiempo entre el calculo de DPR en la base y su aplicación en la estación remota.
DGPS clásico j PR Aj A l Qué equipo es necesario ? l Un receptor GPS y un receptor de la señal de la estación de referencia l Un software que aplique la corrección a las observaciones locales l Problemas: 1. con la distancia no cancelan los errores, 2. es necesario que haya conexión entre emisor y receptor PR Bj DPR Aj B
RTK clásico j F Aj A l Qué equipo es necesario ? l Un GPS y un emisor en la estación de referencia l Un GPS y un receptor de la señal de la estación de referencia l Un software que calcule en tiempo real la posición de B respecto de A (conocida) l Problemas: 1. con la distancia no cancelan los errores, 2. es imperioso que haya conexión entre emisor y receptor y esta no se pierda, de lo contrario habrá que inicializar nuevamente. F Bj F Aj B
VRS (virtual reference station) C F Cj D F Dj * A F Aj B F Bj l A, B, C estaciones de referencia l En cada una se puede calcular para cada sat j l F = F observada - F calculada l Las correcciones obtenidas en cada una de ellas pueden interpolarse dentro del triángulo l F Dj* = F Dj + F Dj* l F Dj = la calculada en base a la posición de la estación ficticia y las efemérides satelitales l F Dj* = es una “observación” ficticia l Las observaciones ficticias se procesan junto con las observadas en un “rover”