Differential Geometry Computer Vision 8 Differential Geometry 1


 = ( x(s),")
 1. Arc length, s 2. coordinates 3. tangent 4. curvature")
 toward the empty side. : Curvature")














")
 Z Y X")





")


 u Distribution of normals represented in the spherical coordinates –")

")




 Normal distance and area of a 3 -D object are encoded")
 Gauss mapping Origin (a) Cube (b) CEGI of cube (note: The")





- Slides: 49
Differential Geometry Computer Vision #8
Differential Geometry 1. Curvature of curve 2. Curvature of surface 3. Application of curvature
Parameterization of Curve 1. curve - s arc length s a(s) = ( x(s), y(s) ) a(s) 2. tangent of a curve a’(s) = ( x’(s), y’(s) ) 3. curvature of a curve a”(s) = ( x”(s), y”(s) ) |a”(s)| -- curvature
Example (Circle) 1. Arc length, s 2. coordinates 3. tangent 4. curvature
Definition of Curvature The normal direction (n) toward the empty side. : Curvature
Corner Model and Its Signatures s=0 a b b a d c d arc length c b a c d s=0 a a b c
Gaussian Filter and Scale Space a + a b + + b a c f d e d c h g i j e k
Curvature Scale Space Descriptor
Curvature of Surfaces normal curvature normal section non-normal section Principal directions and principal curvatures
Principal Curvatures plane: all directions sphere: all directions cylinder: ellipsoid: hyperboloid:
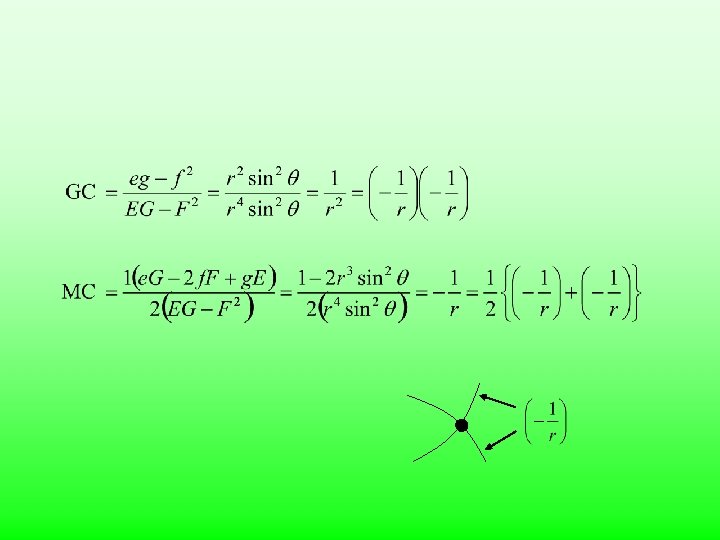
Gaussian Curvature and Mean Curvature
Parabolic points Parabolic point elliptic point hyperbolic point F. Klein used the parabolic curves for a peculiar investigation. To test his hypothesis that the artistic beauty of a face was based on certain mathematical relation, he has all the parabolic curves marked out on the Apollo Belvidere. But the curves did not possess a particularly simpler form, nor did they follow any general law that could be discerned.
Other Feature Points & Edges u Edges: maxima of curvatures u Zero-crossing of Gaussian/mean curvature u Ridges and valleys u Umbilic point: principle curvatures are the same
Lines of Curvature Principal directions, which gives the maximum and the minimal normal curvature. Principal direction curves along principal directions PD PD PD
Lines of Curvature
Curvature Primal Sketches along Lines of Curvature
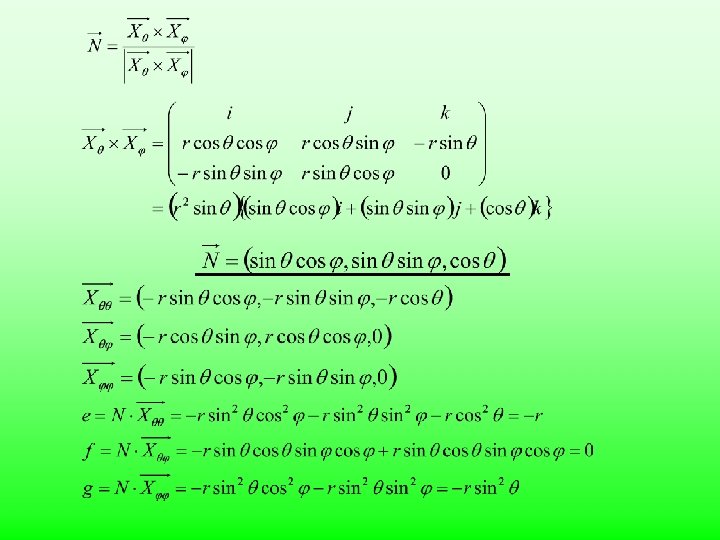
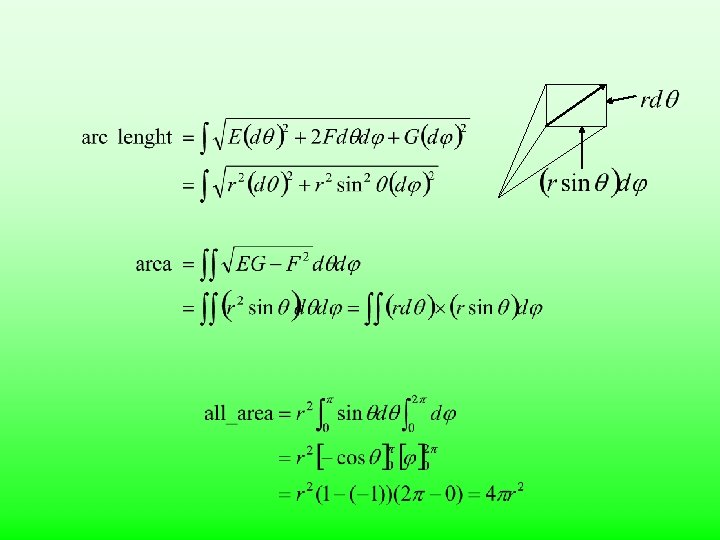
Important Formula 1. Surface 2. surface normal 3. the first fundamental form 4. the second fundamental form
Important formula (2)
Example (sphere) Z Y X
Estimate Normal & Curvatures of Polygon Mesh Model u Normal – Weighted average of normals of the adjacent faces – Fit plane u Curvature – Fit algebraic surface – Fit circles & – Curvature Tensor
Estimate Normal & Curvatures of Point Cloud - Tensor Voting u Each point has its estimated normal which is represented by the eigensystem
Estimate Normal using Tensor Voting u Voting – Estimate normal from positions of receiver and voter and estimated normal of voter Normal tensor vote
Estimate Curvature using Tensor Voting u Estimate surface – Point on the unknown surface gets maximum saliency Estimate curvature tensor
Summary 1. curvature of curve 2. curvature of surface – Gaussian curvature – mean curvature
Surface Description #2 (Extended Gaussian Image)
Topics 1. Gauss map 2. Extended Gaussian Image 3. Application of EGI
Gauss map gauss map 1 D gauss map Let S⊂R 3 be a surface with an orientation N. The map N: S→R 3 takes its values in the unit sphere The map N: S→S 2 is called the Gauss map. 2 D
Extended Gaussian Image (EGI) u Distribution of normals represented in the spherical coordinates – A weight is expressed the area of the surface having the given normal
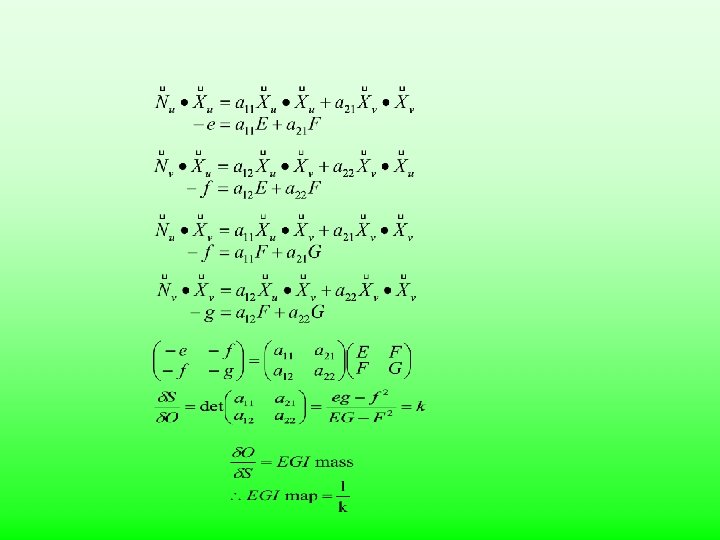
Characteristics of EGI u. EGI is the necessary and the sufficient condition for the congruence of two convex polyhedra. u. Ratio between the area on the Gaussian sphere and the area on the object is equal to Gaussian curvature. u. EGI mass on the sphere is the inverse of Gaussian curvature. u. Mass center of EGI is at the origin of the sphere u. An object rotates, then EGI of the object also rotates. However, both rotations are same.
Relationship between EGI and Gaussian Curvature object Gaussian sphere small large small (K: small) small (K: large) large
Gaussian Curvature and EGI Maps u u Since and exist on the tangential plane at , we can represent them by a linear combination of and
Implementation of EGI Tessellation of the unit sphere • All cells should have the same area have the same shape occur in a regular pattern • geodesic dome based on a regular polyhedron semi-regular geodesic dome
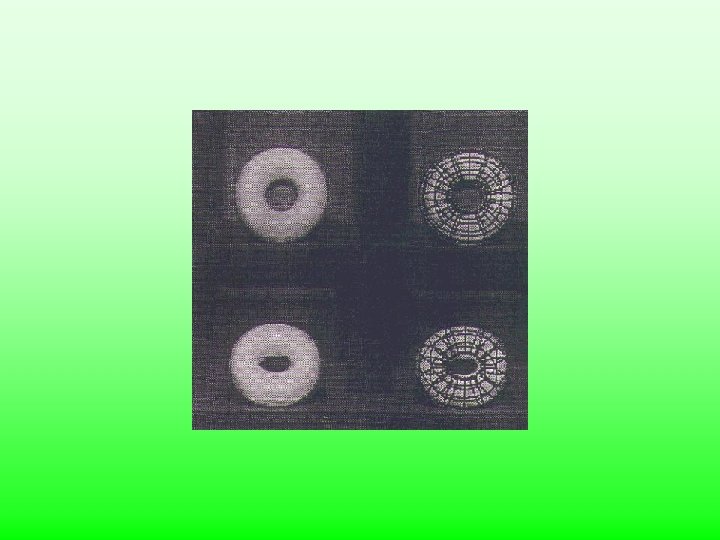
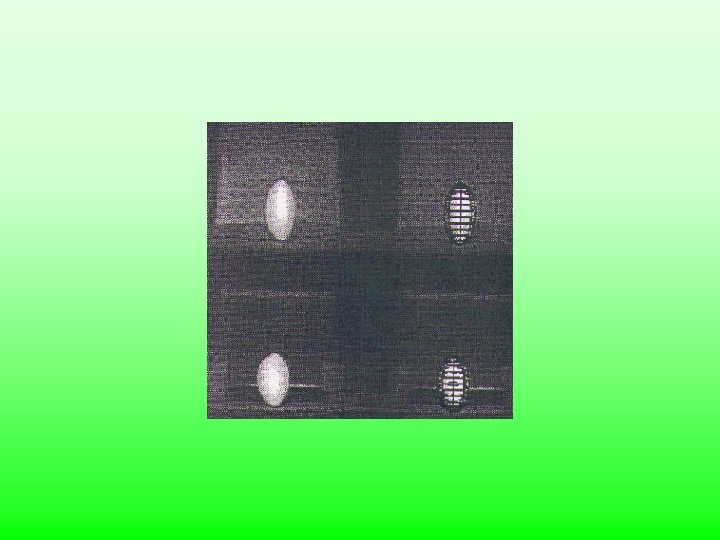
Example of EGI side view top view Cylinder Ellipsoid
Determination of Attitude using EGI 10 20 0 5 8 0 viewing direction EGI table
The Complex EGI(CEGI) Normal distance and area of a 3 -D object are encoded as a complex weight. Pnk associated with the surface normal nk such that:
The complex EGI(CEGI) Gauss mapping Origin (a) Cube (b) CEGI of cube (note: The weight is shown only for normal n 1 for clearly. )
Bin Picking System based on EGI Photometric stereo segmentation Region selection Photometric stereo EGI generation EGI matching Grasp planning Needle map isolated regions target region precise needle map EGI object attitude
Calibration Lookup table for photometric stereo Hand-eye calibration
Photometric Stereo Set-up
Bin-Picking System
Summary 1. Gauss map 2. Extended Gaussian Image 3. Characteristics of EGI congruence of two convex polyhedra EGI mass is the inverse of Gaussian curvature mass center of EGI is at the origin of the sphere 4. Implementation of EGI Tessellation of the unit sphere Recognition using EGI 5. Complex EGI 6. Bin-picking system based on EGI 7. Read Horn pp. 365 -39 pp. 423 -451