Design Review 4 The Helping Hands Ben Davis

Design Review 4 The Helping Hands: Ben Davis, Hongchen Li, Breanon Mc. Nair, and Chathura Wijayabandara

Overview ● ● ● ● Beginning the project Motors User Interface Haptic Feedback Power Sources K 1 Hand Candy Bar Math Looking Towards the Future Presented by Ben

The Beginning ● ● ● Forming the Team Making our Plan Maintaining Moral Presented by Ben and Breanon

Arduino V. S Raspberry Pi ● ● ● Both have advantages Arduino has a more user friendly interface Raspberry Pi utilizes python software, which no one on the team was highly efficient in Presented by Ben

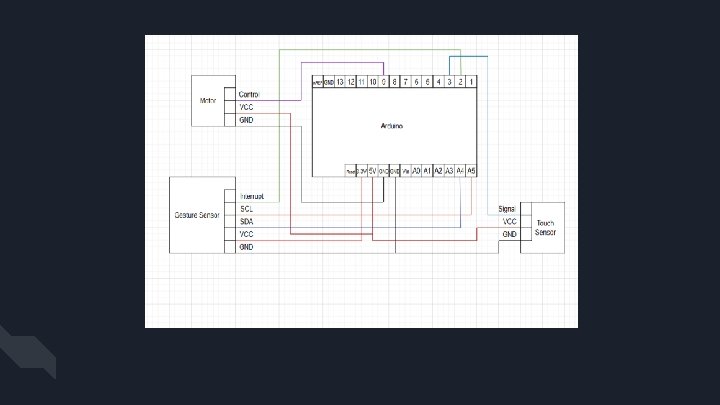
Motors: Stepper and Servo ● Stepper ● Servo Presented by Ben and Breanon
 Binary")
Touch Sensor and Gesture Sensor ● 1. 2. 3. Touch Sensor (manual control) Binary Control Easy two step coding command Initiates the rest of the commands ● 1. 2. 3. Gesture Sensor (automatic control) Operates based off of motion Activates other controls once initiated Can overheat rather quickly Presented by Breanon

Haptic Feedback ● Peltier Design ● Thermoresistor ● Pressure Presented by Breanon
 Presented by Breanon")
Bluetooth ● Xbee ● Mate Silver ● BLE (Built in Bluetooth) Presented by Breanon

Power Sources ● 1. 2. 3. Arm Using RC car battery Power distribution Consistent power usage ● 1. 2. 3. Foot Using tiny battery with high output Needs to power Bluetooth and Sensor Easily Rechargeable Presented by Breanon

K 1 Hand ● ● ● Originally created by Evan Kuester We worked to manipulate the design Encountered difficulties in printing Presented by Ben

Candy Bar Math ● ● ● The motors are capable of a cumulative of 100 kg-cm A Snickers bar is ~50 grams 100 kg-cm is ~10 N-m It takes ~1 N-m to move 100 grams Thus, theoretically the cumulative force that the motors could exert would be enough to lift 20 Snickers Bars. Presented by Ben

Looking Towards The Future ● ● ● BLE Design More Fluid Gesture Sensor Design Tinier, more efficient touch sensor Amplified Motor Performance Advanced Thumb Control Successful Modification of K 1 Hand Presented by Breanon

The End
- Slides: 14