Cours 2 AJUSTEMENTS POSTURAUX I INTRODUCTION Pourquoi estil





 Définition")

 Perturbation interne de la posture et équilibre La réalisation d’un mouvement est amenée")







 mouvements du bras La fonction des APA dans cette tâche serait de stabiliser")


 mouvements de jambes Le contrôle de l’équilibre lors d’un déplacement de membre inférieur")
, lors de mouvements conditionnés de l’une des pattes, on voit")


 Stabilisation de la position de segments donnés Un second objet des APA est")











 Adaptation à court terme Des modifications de type anticipateur ou réactionnel dans le")







- Slides: 50
Cours 2 AJUSTEMENTS POSTURAUX
I - INTRODUCTION Pourquoi est-il important de préserver la posture pendant l’exécution d’un mouvement ? Pour mieux comprendre la présence des anticipations dans le domaine du contrôle de la posture, il faut rappeler les deux fonctions de ce contrôle dans la vie quotidienne. La première fonction, gravitaire, comporte deux aspects. - Le premier réside dans la construction de la posture contre les forces gravitaires. Il est basé sur la régulation du tonus musculaire et du tonus postural. - Le second concerne la conservation de l’équilibre avec une projection verticale du centre de gravité maintenue à l’intérieur de la base de support.
La seconde fonction posturale est de servir d’interface avec le monde externe pour la perception et l’action. L’orientation d’un certain nombre de segments, tels que la tête et le tronc, sont souvent alignés avec la verticale de façon à servir de cadre de référence pour la perception des mouvements du corps vis à vis du monde externe. Basée sur des stimuli visuels ou vestibulaires de déplacement, l’orientation posturale du corps est réajustée en fonction de ce cadre de référence. Les ajustements posturaux anticipés permettent d’atteindre 3 objectifs : - minimiser la perturbation à l’équilibre pendant le mouvement
- minimiser la perturbation à l’orientation posturale des segments servant de cadre de référence pour l’organisation du mouvement - assister la réalisation du mouvement en terme de vitesse ou de force. Cela fait plus de 40 ans qu’il a été montré que, lors de mouvements tels que l’élévation du bras à partir de la station debout, les premiers muscles activés intervenaient au niveau des membres inférieurs. Ces muscles, impliqués dans le contrôle postural, interviennent entre 50 et 100 ms avant le début du mouvement proprement dit.
Ces APA ont été interprétés comme des commandes agissant en parallèle et en boucle ouverte dont le but serait de minimiser la perturbation associée à la réalisation du mouvement. Depuis cette première étude, un large éventail de données ont pu être rassemblées qui apportent une lumière nouvelle sur la fonction de ces ajustements intervenant en boucle ouverte, leur organisation centrale, leur acquisition et leur pathologie.
II - POURQUOI LES AJUSTEMENTS POSTURAUX ANTICIPES SONT-ILS ASSOCIES AUX MOUVEMENTS ? 1) Définition des ajustements posturaux anticipés Les ajustements posturaux associés au mouvement sont dénommés anticipateurs dans la mesure où ils commencent à intervenir avant le début de la perturbation posturale occasionnée par le mouvement. Le contrôle s’effectue nécessairement en boucle ouverte. Cette dernière particularité n’empêche pas que des ajustements posturaux réactionnels, organisés selon un mode de boucle fermée, intervienne, plus tardivement, dans l’acte moteur.
Les propriétés biomécaniques de ces ajustements tardifs seraient différentes de ceux qui sont anticipés. Il apparaîtrait que la perturbation engendrée par la réalisation d’un mouvement puisse se scinder en deux facteurs : - la force résultante qui exerce une action linéaire au niveau du CG - un moment résultant qui exerce un effet de rotation autour de chacun des trois axes (vertical, sagittal et latéral) qui passent par le CG. Il semblerait que les APC soient avant tout sensibles au facteur linéaire. A l’opposé, les APA seraient eux surtout sensibles au facteur rotationnel.
2) Perturbation interne de la posture et équilibre La réalisation d’un mouvement est amenée à perturber la posture et l’équilibre pour deux raisons: - Le corps n’est pas un bloc rigide mais un système flexible de segments reliés entre eux par des muscles agissant autour des articulations. Lorsqu’un mouvement est réalisé en station debout, la géométrie du corps est modifiée et cela se traduit par un déplacement de la projection verticale du CG. Ce phénomène fut mis en évidence par Babinski (1899) puis par Martin (1967) montra que des mouvements vers l’arrière de certains segments accompagnent l’élévation bras.
- La seconde est que le mouvement est initié par des forces internes résultant de la contraction musculaire. Dans l’élévation unilatérale du bras, les forces sont dirigées vers le haut et l’avant. A l’inverse les forces de réaction s’exercent en direction opposée sur les segments de support et sur le reste du corps, ce qui conduit à une perturbation posturale et donc à un déséquilibre. Ces forces de réaction dynamiques sont encore plus visibles lors de mouvements rapides. Une accélération plus importante est en effet nécessaire pour vaincre l’inertie du segment à déplacer. A l’inverse, les mouvements lents n’occasionnent pas en règle générale d’APA.
Une analyse accélérométrique au niveau de plusieurs articulations a été effectuée par Bouisset et Zattara (1987) lors d’élévations du bras uni et bi-latérales. Leurs résultats montrent que ces forces anticipées sont dirigées dans la direction opposée des forces de réaction associées à la réalisation du mouvement. Leur fonction est donc de minimiser la perturbation occasionnée par le mouvement. 3) Approches modulaire et globale de l’équilibre Classiquement, la référence posturale (la station debout) est déterminée génétiquement pour chacune des espèces. La posture est principalement construite pour lutter contre les forces de gravité.
La posture humaine ne peut être assimilée à un bloc rigide pouvant osciller autour des chevilles (pendule inversé) même si parfois elle se comporte ainsi. Il faut plutôt la considérer comme une superposition de modules allant des pieds à la tête, chacun étant lié avec le suivant par un jeu de muscles ayant chacun une régulation bien spécifique (centrale et périphérique) pour permettre le maintien de la position de référence de chaque module. Ces positions de référence pour chaque module peuvent être régulées indépendamment les unes des autres. Des déficits de l’un de ces modules ont pu être étudiés à un niveau local (pathologies, fatigue locale). Un contrôle plus général considérant la posture comme un tout a aussi été démontré.
La rigidité de décérébration décrite par Sherrington est un des exemples montrant qu’un contrôle global s’exerce sur les muscles extenseurs anti-gravitaires. La question de l’objectif spécifique des APA associés au mouvement volontaire est posée. Sont-ils liés au maintien de l’équilibre ou à la stabilisation de modules posturaux ? Les données de la littérature montrent à l’évidence que ces deux aspects sont en fait impliqués. 4) Ajustements posturaux anticipés associés et conservation de l’équilibre a) mouvements axiaux
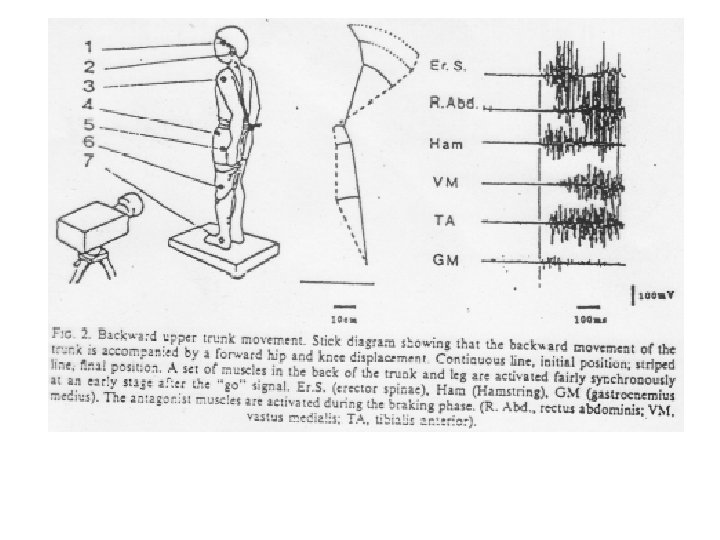
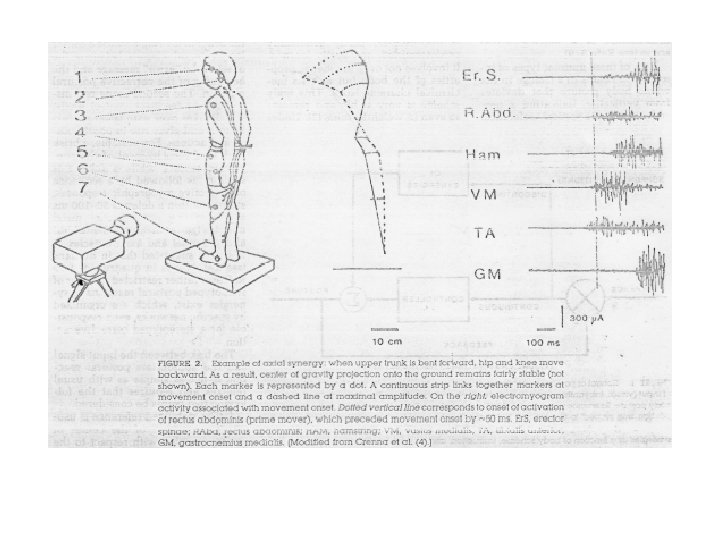
Une analyse complète de ce type de mouvement a été entreprise sur la base de données cinématiques, de plate-formes de force et d’EMG. Les changements cinématiques observés montrent que le mouvement du tronc est précédé par une activation des muscles du tronc (erector spinae ou rectus abdominis) et de la jambe (ischiaux - triceps suralis ou quadriceps – tibialis anterior), qu’il s’agisse d’une flexion ou d’une extension. L’activation des muscles de la jambe est simultanée à ceux du tronc que l’on qualifie de primum movens ou peut même les précéder. Cela signifie donc qu’un ajustement postural en boucle ouverte apparaît.
Les mouvements du tronc dans une direction donnée sont associés simultanément à des mouvements de la hanche et du genou en direction opposée. Résultat de cette coordination complexe multi-articulaire, le déplacement horizontal du CG demeure assez faible (< 2 cm) alors que des déplacements de l’ordre de 9 cm apparaissent en l’absence de toute coordination.
Un autre exemple de synergie axiale visant à maintenir stable la projection verticale du CG est observé dans les mouvements respiratoires. La rythmicité des mouvements du tronc est compensée par des mouvements au niveau du bassin en direction opposée lorsque le sujet se tient debout, ce qui permet là encore un maintien de la projection verticale du CG. Ces synergies ne sont plus observées en station assise ni dans des conditions pathologiques.
b) mouvements du bras La fonction des APA dans cette tâche serait de stabiliser la position du CG. Bouisset et Zattara (1987) se sont intéressés aux forces d’accélération au niveau des différents segments et ont décrit les APA associés au mouvement lors d’élévations uni ou bilatérale du bras. Leurs résultats montrent que les APA créent un mouvement dont la force d’inertie permet de contrebalancer celles induites par le mouvement segmentaire. Ces APA, spécifiques pour chaque type de mouvement, contre-balancent en fait l’accélération prise par le CG du corps lors du mouvement.
Dans des conditions de temps de réaction, le fait de lever un bras avec ou sans charge induit un début d’ajustement postural, ou latence motrice, constant vis à vis du signal sonore déclencheur. Le début du mouvement proprement dit, objectivé par l’activation du deltoïde, est en fait retardé lorsqu’une charge supplémentaire est soulevée. Ce temps de réaction accru est dû à une plus longue durée des APA.
La vitesse de déplacement du CG produit par ces APA est augmentée lorsque le mouvement débute, ce qui a pour effet de mieux contrebalancer la plus grande perturbation à l’équilibre. Certains auteurs ont suggéré que ces déplacements préparatoires ne seraient pas spécifiquement liés au contrôle de l’équilibre mais plutôt qu’ils apporteraient directement une force additionnelle pour que le mouvement puisse s’effectuer. La frontière entre posture et mouvement n’est donc pas toujours très évidente et ces ajustements peuvent être perçus comme faisant partie du contrôle du mouvement. Ce distinguo peut conduire à faire la différence entre APA et ajustements préparatoires
c) mouvements de jambes Le contrôle de l’équilibre lors d’un déplacement de membre inférieur est intéressant à analyser du fait de l’implication du segment mobilisé dans le support du corps. Tout mouvement de jambe en effet modifie les conditions de support et entraîne un déplacement de la position du CG avant le déclenchement du mouvement. Une caractéristique générale de ce type de mouvement est qu’ils impliquent une séquence préalable où le CG doit être déplacé vers les segments demeurant en appui et que le mouvement est retardé tant que le déplacement du CG n’a pas atteint une position donnée.
Chez les quadrupèdes (chat), lors de mouvements conditionnés de l’une des pattes, on voit apparaître de façon anticipée un déplacement du CG vers le centre du triangle formé par les trois appuis restants. Ce déplacement est provoqué par une poussée des extenseurs du segment à mouvoir, augmentant la force sous cet appui avant l’allègement. Ceci favorise l’accélération du CG vers le côté opposé.
La même séquence est observable chez l’homme lors d’une tâche de flexion de la jambe. Un déplacement initial du CP vers l’appui devant être fléchi est en effet observé. Cette poussée initiale est corrélée avec l’accélération du CG vers la jambe opposée. Lors de mouvements lents, cette poussée initiale disparaît. Des résultats similaires lors de mouvements de jambes à grande vitesse ont été obtenus lors d’expérimentations consistant à déplacer une jambe jusqu’à un angle de 45°, ceci le plus rapidement possible (Mouchnino et al. , 1992). La première étape consiste, dans cette tâche, à déplacer le poids du corps vers la jambe d’appui.
L’ajustement postural associé au déplacement de jambe permet de déplacer la projection du CG vers un endroit compatible avec le maintien de l’équilibre lors du déplacement segmentaire. Cet acte moteur se caractérise donc par un contrôle séquentiel avec deux objectifs distincts réalisés successivement : - déplacer la projection du CG à l’aplomb du pied d’appui. - élever la jambe. Le début du mouvement est retardé jusqu’à ce que le déplacement du CG soit réalisé ou sur le point de l’être.
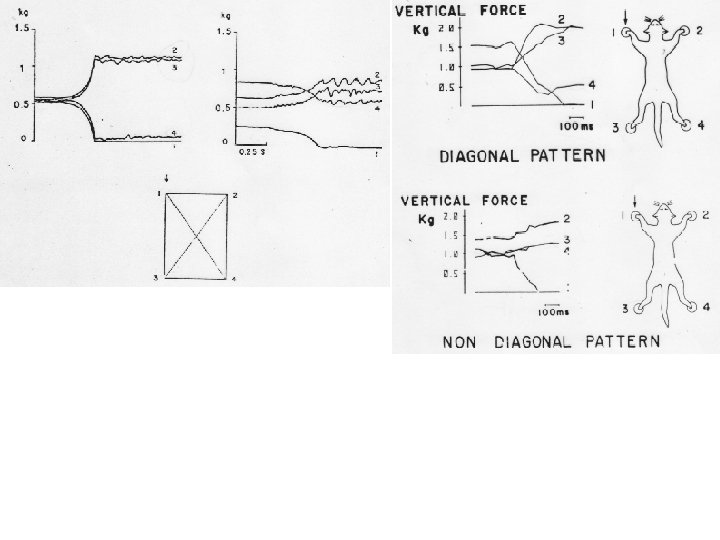
5) Stabilisation de la position de segments donnés Un second objet des APA est la stabilisation de segments (tête, tronc, segments) pendant l’exécution d’un mouvement. Un exemple est fourni par les modifications posturales qui permettent le maintien du corps même en cas d’une augmentation des forces verticales. Ceci a été décrit chez les quadrupèdes lors de la perte d’appui d’une patte. Avec une régulation de type diagonale, une augmentation de l’activité des extenseurs de l’un des appuis s’accompagne d’une augmentation similaire de l’appui de la même diagonale alors que les extenseurs deux appuis restants voient leur activité diminuer.
Du fait des propriétés élastiques des muscles, une surcharge brutale sur une des diagonales pourrait induire un affaissement du dos et par suite du CG. Cet inconvénient n’a pas d’effet sur le contrôle postural puisque la projection au sol du CG n’est pas modifiée. L’ajustement postural accompagnant ce type de mouvement, en agissant en boucle ouverte, renforce la rigidité (raideur) des muscles extenseurs. Cette stratégie diagonale a été décrite chez le chat lors de mouvements corticalement déclenchés, de mouvements conditionnés ou imposés. Une stabilisation en boucle ouverte de segments (tête, tronc, avant-bras) contre des perturbations découlant de la réalisation d’un mouvement volontaire est également observée chez l’homme.
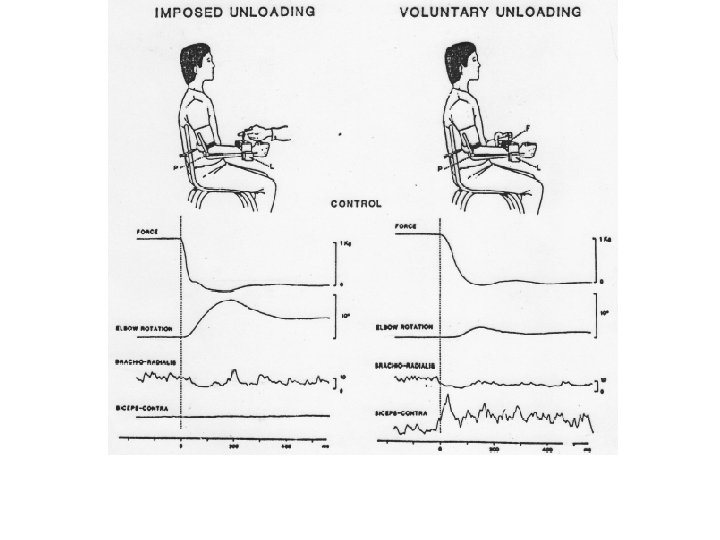
Comme la position de segments tels que la tête servent de valeur de référence pour la réalisation de mouvements, une tâche prioritaire du SNC est de les stabiliser pendant l’exécution du mouvement. Un exemple de ce type de coordination est la manipulation d’objets. Afin de permettre la stabilisation du segment, des APA au niveau des fléchisseurs de l’avant-bras se déclenchent en même temps que l’activation du biceps qui effectue l’allègement. Ces ajustements posturaux sont observables chez des patients déafférentés, montrant ainsi que le contrôle s’effectue en boucle ouverte.
La manipulation d’objets pesants est une vieille habitude apprise dès l’enfance. La stabilisation de la position de l’avant-bras est un prérequis pour une exploration attentive de l’environnement ou la manipulation d’objets. Une stabilisation de la tête en boucle ouverte est également observée lors d’ élévations de bras ou de jambe. La tête est également stabilisée pendant la locomotion et durant la stratégie de hanche qui survient lors d’une perturbation imposée de la plate-forme d’appui. Un autre protocole utilisé pour étudier la coordination posture-mouvement dans une logique de stabilisation est la tâche d’allègement bi-manuelle.
Lorsque l’allègement de la charge intervient volontairement avec l’autre main, une inhibition anticipatrice intervient au niveau des fléchisseurs du bras qui est liée temporellement au début de l’activation des muscles fléchisseurs du bras leveur. A l’opposé, aucune anticipation n’apparaît lors de la condition d’allègement imposée. Un réflexe d’allègement est observé au niveau des fléchisseurs de l’avant-bras. Ce réflexe augmentant avec la répétition, l’amplitude maximale de la flexion de l’avant-bras résultant de cet allégement diminue progressivement. La vitesse maximale du bras demeure inchangée puisqu’ elle est atteinte avant le début de l’intervention efficiente du réflexe d’allègement.
La préservation de la posture de l’avant-bras étant spécifiquement liée à la manipulation de la charge par l’autre main, l’hypothèse a pu être émise que cette posture de l’avant-bras serve de cadre de référence pour la manipulation d’objets lourds. Ces ajustements anticipés sont observables dès l’âge de 3 -5 ans.
III – ORGANISATION DES APA Deux contrôles pourraient agir en parallèle : un pour l’anticipation posturale, un pour la réalisation du mouvement Ce schéma d’organisation est légitimé par trois observations dans les protocoles d’allègement. 1 L’anticipation n’apparaît que lorsque la source de perturbation est un mouvement volontaire. Même si un signal sonore avertit avec le même délai la perturbation, l’anticipation n’apparaît pas.
2 L’APA permettant le maintien du bras n’est pas toujours lié au mouvement d’allègement de l’autre bras. Ces ajustements peuvent survenir lorsque l’allègement du bras est provoqué par une flexion ou une extension du coude ou même par un mouvement du pied. 3 Les APA ne sont pas liés à un paramètre donné du mouvement volontaire (force ou amplitude par ex), mais à la perturbation à venir de l’avant-bras. On peut le montrer en faisant varier la charge à déplacer. Une mémoire motrice (modèle interne) serait responsable de ces ajustements et résulterait d’un apprentissage.
IV – PROCESSUS D’ACQUISITION Le problème posé par l’acquisition des coordinations posturo-cinétiques se situe dans le cadre plus général de l’acquisition des habiletés motrices. L’apprentissage peut être considéré comme la recherche de la solution motrice optimale au problème moteur posé par le mouvement volontaire. Dans ce domaine, Adams (1971) a proposé la théorie en boucle fermée de l’apprentissage moteur dans laquelle deux catégories de mémoires seraient impliquées. La trace mnésique, aurait pour but de sélectionner et d’initier le mouvement. La trace perceptive correspondrait à une image des corrections du mouvement basée sur l’expérience.
Cette trace perceptive permet le contrôle en cours de mouvement en comparant les mouvements désiré et réalisé. Dans ce cadre, les APA témoignent d’une adaptation aux contraintes externes (conserver l’équilibre) et internes (compensation de la perturbation liée à l’exécution du mouvement volontaire). Les APA sont pour la plupart acquis par apprentissage car leur organisation dépend de l’expérience qui associe la perturbation occasionnée par le mouvement au mouvement lui-même. Des études ont montré que les APA présents dans les muscles des jambes étaient acquis dès la prime enfance et qu’ils perduraient jusqu’à un âge avancé avant de s’altérer progressivement.
Le processus général rendant possible l’acquisition d’un APA implique la transformation de corrections posturales agissant en boucle fermée en un contrôle en boucle ouverte associé au mouvement volontaire perturbateur. Le modèle général de cette transformation repose sur la construction d’une image interne de la perturbation à minimiser et le contrôle nécessaire pour l’annuler. Les APA sont généralement construits dans des conditions où un mouvement volontaire amène une perturbation posturale et non pas lorsque la perturbation est imposée de façon extérieure.
Cependant, dans les mouvements de lâcher-attrapage, si l’énergie cinétique de l’impact peut être estimée sur la base d’information sensorielles, des APA peuvent être observées en l’absence de mouvement volontaire. Structures du SNC mises en jeu dans cette acquisition: Une étude menée par Ioffe et al. (1988) a montré qu’un L’acquisition de nouvelles coordinations nécessite un cortex moteur et un faisceau cortico-spinal intacts. Cela a été montré par Ioffe et al. (1988) chez des chiens lors de flexion de la patte (stratégie diagonale devenant non- diagonale)
1) Adaptation à court terme Des modifications de type anticipateur ou réactionnel dans le patron des ajustements posturaux peuvent être observées à partir du moment où les contraintes environnementales se modifient. Cela a pu être observé dans le cas des ajustements anticipés associés à des mouvements de bras lorsque l’on prend appui sur un support. Lorsque les mains jouent cette fonction d’appui, les ajustements posturaux préalablement détectés au niveau des muscles de la jambe apparaissent alors au niveau des muscles du bras (Cordo et Nashner, 1982). La commande centrale s’adapte aux nouvelles conditions sans qu’il y ait pour autant apprentissage.
Lorsque l’on se tient debout sur un support étroit, les premières activations des muscles distaux de la jambe associés au mouvement volontaire de flexion du tronc vers l’arrière disparaissent. L’activation de ces muscles dans des conditions de support normales engendre des forces de cisaillement horizontales susceptibles de conduire, avec un support étroit, à une perte d’équilibre. Cette adaptation à court terme est en fait le résultat d’un entraînement à long terme. 2) Entrainement à long terme Deux approches peuvent être proposées pour rendre compte de ces effets.
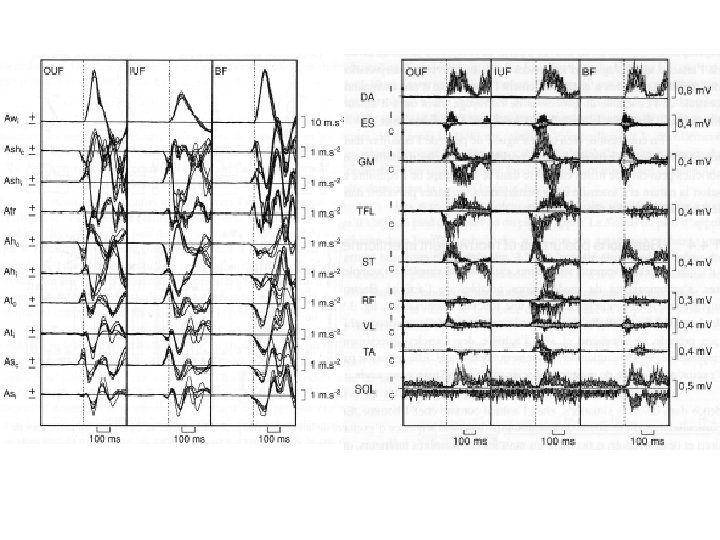
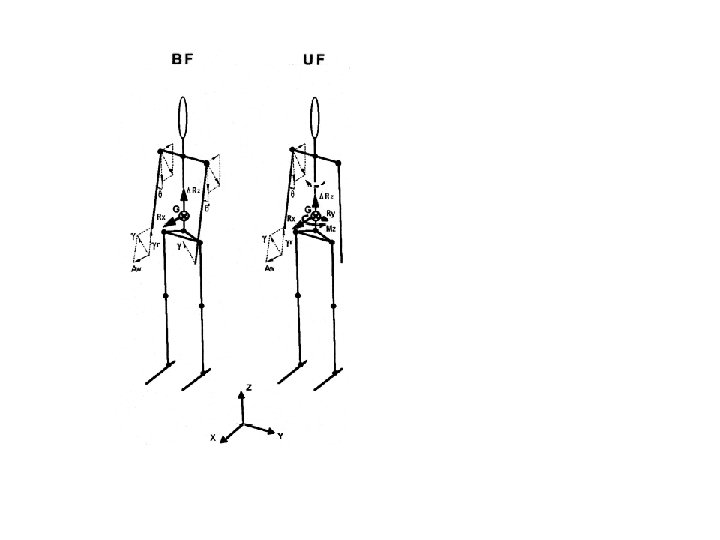
La première consiste à placer les sujets entraînés dans une tâche spécifique appartenant au répertoire des habiletés motrices de leur entraînement et à les étudier (par exemple des gymnastes en posture d’ATR). La seconde est de comparer des sujets naïfs et sportifs dans une tâche simple pouvant être exécutée par tous, comme incliner le tronc, lever une jambe à 45° (Mouchnino et al. , 1992) ou déplacer un segment à partir d’une base quadrupédique (Rougier, 1991). Pedotti et al. , 1989 : des gymnastes entrainés et des sujets non entrainés ont été analysés au travers de mouvements de flexion du tronc vers l’arrière.
La patron temporel d’activation musculaire consiste pour les sujets non entrainés en une activation synchrone des muscles du plan postérieur. A l’opposé, chez les gymnastes, une séquence distoproximale est observée.
Cette organisation séquentielle du mouvement s’accompagne d’un contrôle plus efficace de l’équilibre (déplacement horizontal réduit du CG), et d’une extension plus rapide du tronc. Un patron séquentiel de même nature est visible chez les sujets non entrainés lors de mouvements de flexion du tronc vers l’avant. Il en est conclu que ces mouvements font partie de la vie de tous les jours. La différence constatée lors de mouvements vers l’arrière proviendrait d’une acquisition par les gymnastes d’un patron plus efficient résultant vraisemblablement d’une plus grande expérience de l’espace arrière.
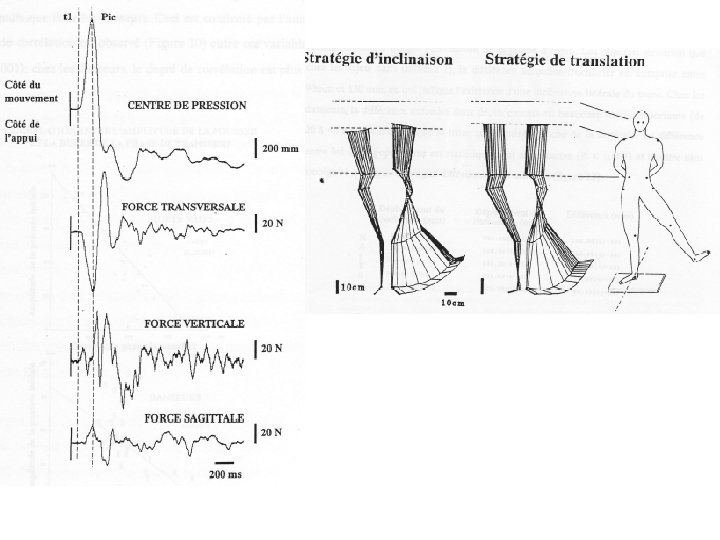
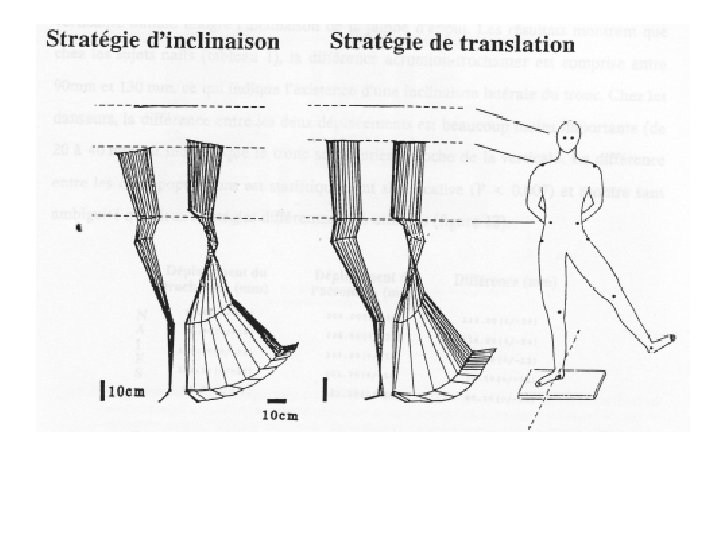
L’influence des effets de l’entraînement sur la coordination entre posture et mouvement a été également observée au cours d’une élévation latérale de la jambe (Mouchnino et al. , 1992). Chez des danseurs expérimentés, une rotation externe de la jambe de support est accompagnée d’une contrerotation du tronc qui précède le début du mouvement et permet de maintenir verticale l’orientation du tronc. Lorsqu’une contre-rotation du tronc est réalisée par des sujets naïfs, elle n’intervient qu’après le début du mouvement. Les meilleurs résultats obtenus chez les danseurs résulteraient par conséquent de leur capacité à maintenir la verticalité du tronc.
Cette stratégie vise à vraisemblablement faciliter le contrôle de la position de la tête, et par suite du regard, vis à vis du tronc. On peut dire là encore qu’il s’agit d’une influence d’effets d’un entraînement à long terme. Un autre exemple est les gymnastes entrainés à effectuer des mouvements de flexion du tronc vers l’arrière à partir d’une surface de sustentation réduite. Ces derniers tombent moins souvent que ne le font les sujets non entrainés. Leur patron musculaire s’est en fait modifié: il n’y a plus d’activation distale au niveau du triceps sural, réduisant les forces horizontales de réaction au sol qui génèrent un déséquilibre.
Les sujets non entrainés ne sont pas capables de supprimer cette activation distale dans ces mêmes conditions, tout au moins lorsque la tâche s’effectue en temps de réaction.