CONTROL BD 2 COILING CONTROL BOARD 1 CAN
 CAN 통신 회로(Controller Area")
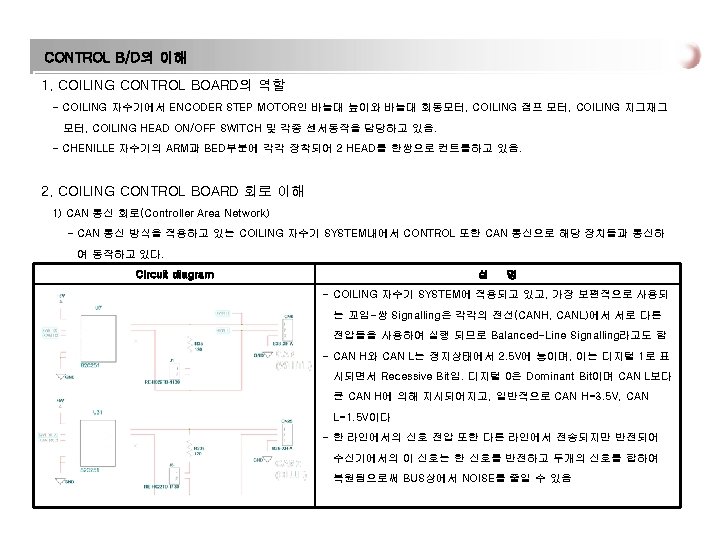
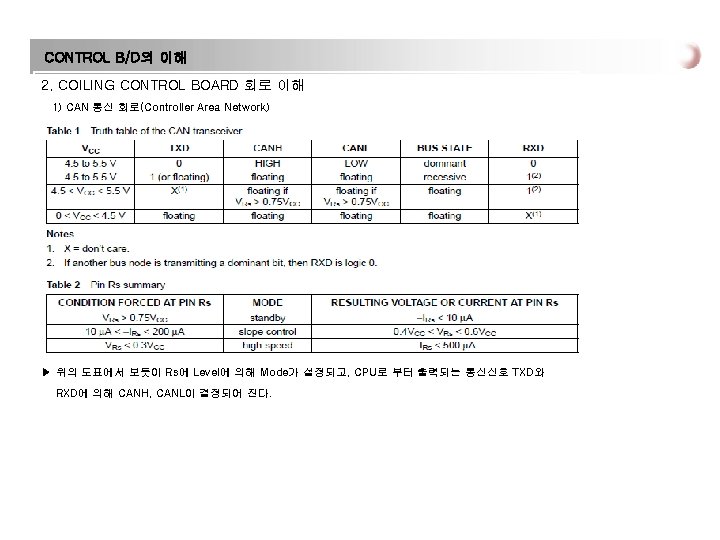
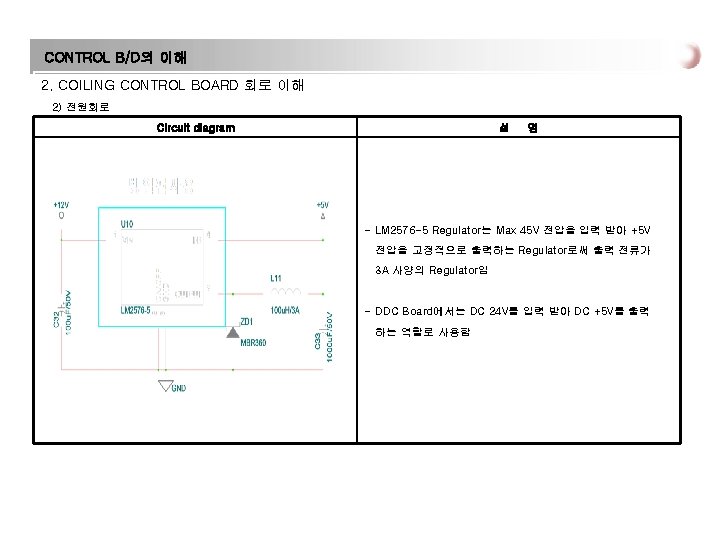
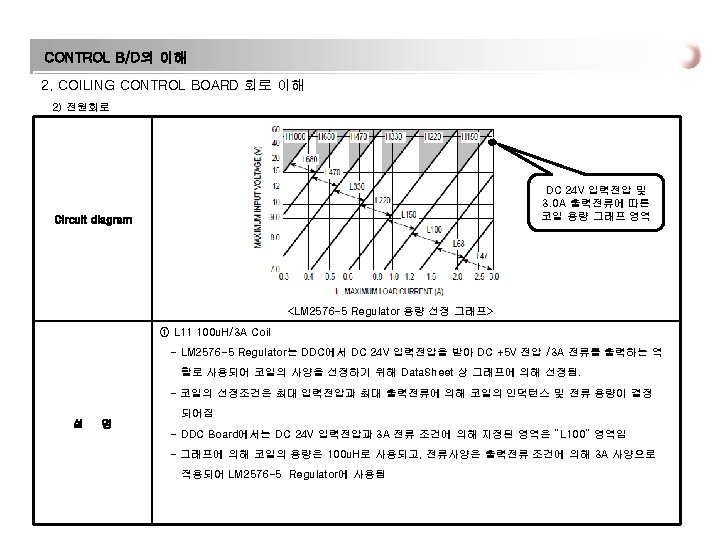
CONTROL B/D의 이해 2. COILING CONTROL BOARD 회로 이해 1) CAN 통신 회로(Controller Area Network) ▶ PCA 82 C 251은 CAN 프로토콜 컨트롤러와 BUS라인 사이에 사용되는 인터페이스용 IC임
 HEAD ON/OFF SWITCH BOARD")
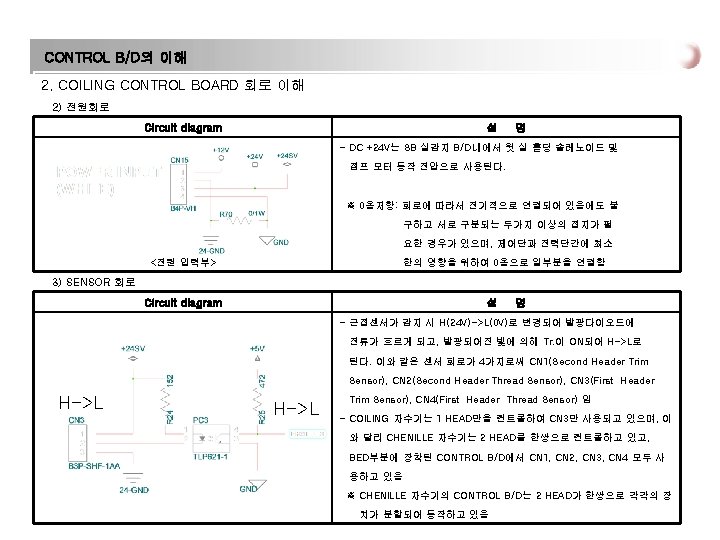
CONTROL B/D의 이해 2. COILING CONTROL BOARD 회로 이해 4) HEAD ON/OFF SWITCH BOARD 회로 - COILING HEAD에 장착되어 LED 점등으로 실 끊어짐 확인 및 HEAD 동작 유무를 설정 Circuit diagram 설 CPU(U 3) ds. PIC 30 F 6010 명 - COILING HEAD 실 끊어짐 시 CPU로 부터 PULSE 신호가 출 력되어 U 9의 1번과 3번으로 입력되며, 이 신호는 연결된 HEAD ON/OFF S/W B/D의 LED를 점등시킨다. - CN 10(FIRST HEAD S/W)는 COILING HEAD의 HEAD CPU(U 3) ds. PIC 30 F 6010 ON/OFF S/W B/D가 연결되며, CN 13(SECOND HEAD S/W) 은 사용하지 않음 ※ CHENILLE 자수기에서는 ARM 부분에 장착된 CONTROL B/D에 2 HEAD의 HEAD ON/OFF SWITCH B/D가 모두 연결됨
 COILING ZIGZAG 및 JUMP")
CONTROL B/D의 이해 2. COILING CONTROL BOARD 회로 이해 8) COILING ZIGZAG 및 JUMP STEP MOTOR 제어 회로 Circuit diagram 74 HC 14 (INVERTER ) 설 명 - U 3 CPU로부터 F_PWM_A, F_PWM_B, S_PWM_A, S_PWM_B의 PWM신호가 동일 위상의 신호로 출력되어 U 2의 74 HC 14(INVERTER) IC를 통과하면서 180도차 CPU(U 3) ds. PIC 30 F 6010 위상의 신호로 분할되어 U 1(74 HC 244) IC로 입력된다. - U 1(74 HC 244)의 1번(F_SELECT)과 19번(S_SELECT) 신호에 의해 출력이 제어된다. ‘L’ 입력시 ENABLE, ‘H’ 입력시 DISABLE 됨
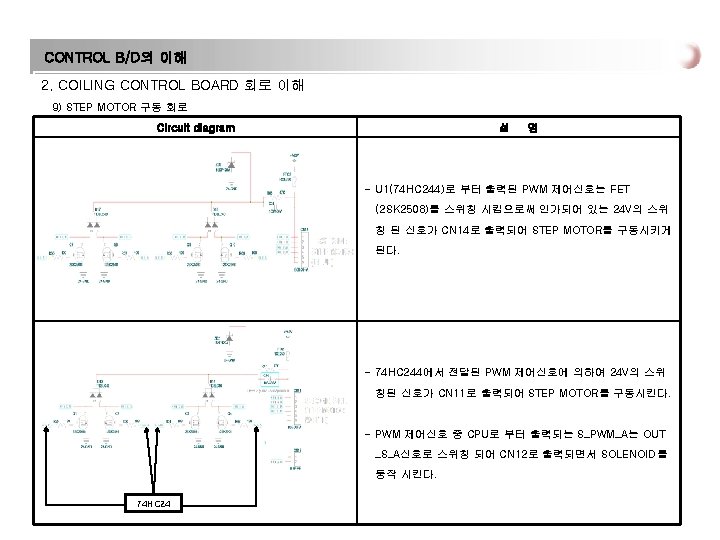

CONTROL B/D의 이해 2. COILING CONTROL BOARD 회로 이해 ※ PWM 제어신호 흐름 F_PWM_A CPU(U 3) ds. PIC 30 F 6010 F_PWM_B 74 HC 14 (U 2) S_PWM_A S_PWM_B S_F_A OUT_F_A S_F_/A OUT_F_/A S_F_B OUT_F_B S_F_/B S_S_A FET (2 SK 2508) OUT_F_/B OUT_S_A S_S_/A OUT_S_/A S_S_B OUT_S_B S_S_/B OUT_S_/B - CHEN ILLE 자수기에서는 ARM부분에 장착되는 CONTROL B/D는 앞의 회로에서 CN 14(First Side Step Motor)와 CN 11 (Second Side Step Motor)에 클러치 모터가 연결되어 동작되며, BED부분에 장착되는 CONTROL B/D는 CHENILLE 사절 모터가 연결되어 동작한다. - COILING 자수기의 CONTROL B/D에서는 CN 14 커넥터에 COILING ZIGZAG STEP MOTOR가 연결되며, CN 11 커넥터에는 COILING JUMP STEP MOTOR가 연결되어 동작한다.
 ENCODER STEP MOTOR 제어회로")
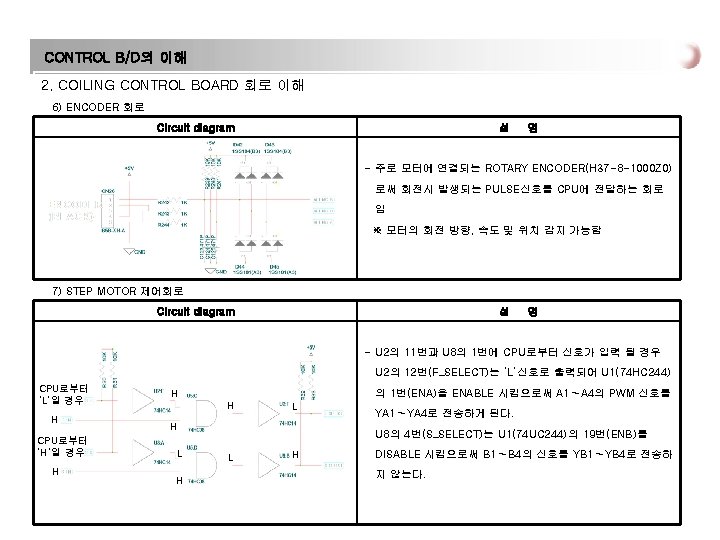
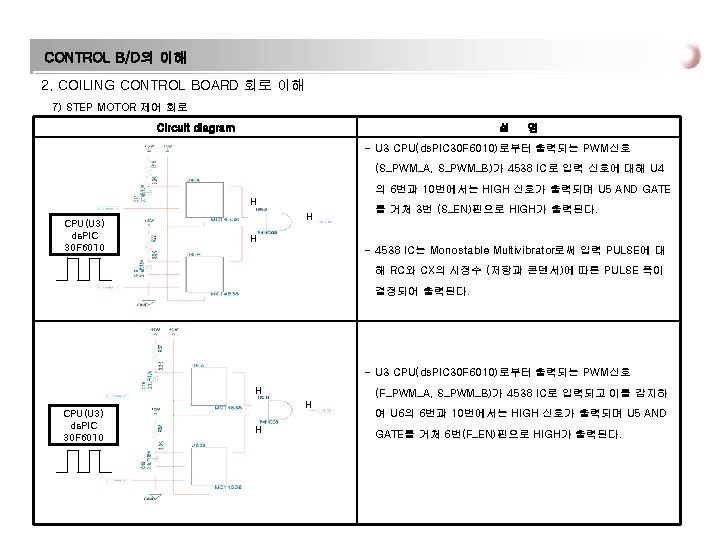
CONTROL B/D의 이해 2. COILING CONTROL BOARD 회로 이해 10) ENCODER STEP MOTOR 제어회로 Circuit diagram 설 명 - CPU(U 14)로 부터 발생되는 PWM신호 A와 B를 4538 IC가 감지하여 6번과 7번 PIN으로 HIGH신호가 출력된다. H H CPU(U 14) ds. PIC 30 F 6010 H <AND GATE> - 74 HC 08(U 16) IC는 입력 Digital 신호의 곱으로 출력되어 지므로 U 4의 3번(TM 1_EN)신호는 HIGH가 출력된다. CPU(U 14) ds. PIC 30 F 6010 - CPU(U 14)로부터 TM 1_S 신호가 H->L로 변경시 INVERTER 를 거쳐 R_EN신호와 AND GATE로 조합되어 ‘H’신호가 출력 H->L H H->L 되며 U 12(74 HC 14) INVERTER를 거쳐 다시 반전되어 TM 1_ SELECT 신호는 H->L로 됨
 ENCODER STEP MOTOR 제어회로")
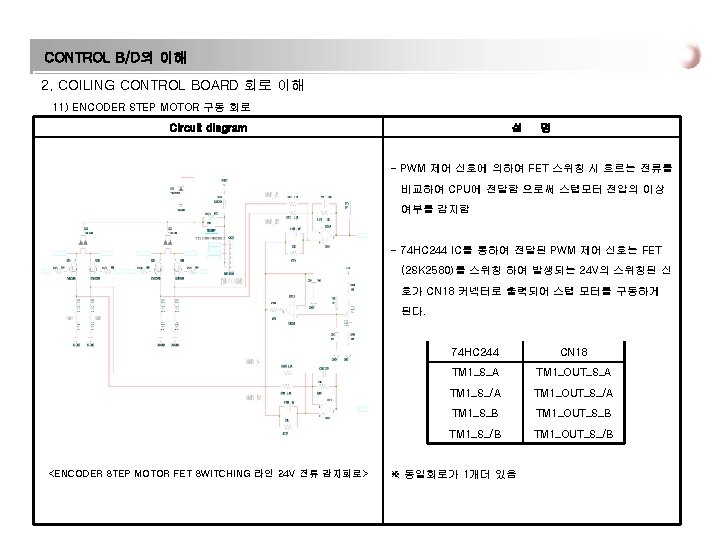
CONTROL B/D의 이해 2. COILING CONTROL BOARD 회로 이해 10) ENCODER STEP MOTOR 제어회로 Circuit diagram 설 명 - CPU(U 14)로 부터 출력되는 PWM 제어 신호는 INVERTER를 거쳐 위상이 180도 차 PULSE로 분할된다. TM 1_PWM_A CPU(U 14) ds. PIC 30 F 6010 TM 1_PWM_B TM 1_S_A TM 1_S_/A TM 1_S_B TM 1_S_/B - 옆의 회로에서는 ENCODER STEP MOTOR를 1개 동작 시키므로 74 HC 244의 ENB(19번)를 사용하지 않으며, TM 1_SELECT 신호가 ‘H’로 입력되면 ENA (1번) DISABLE되어 A 1∼A 4의 PWM 제어신호가 YA 1∼YA 2로 전달되지 않음 반대로 ‘L’신호가 입력되면 ENA가 ENABLE되어 신호가 전달됨
 CONTROL B/D 내 ENCODER")
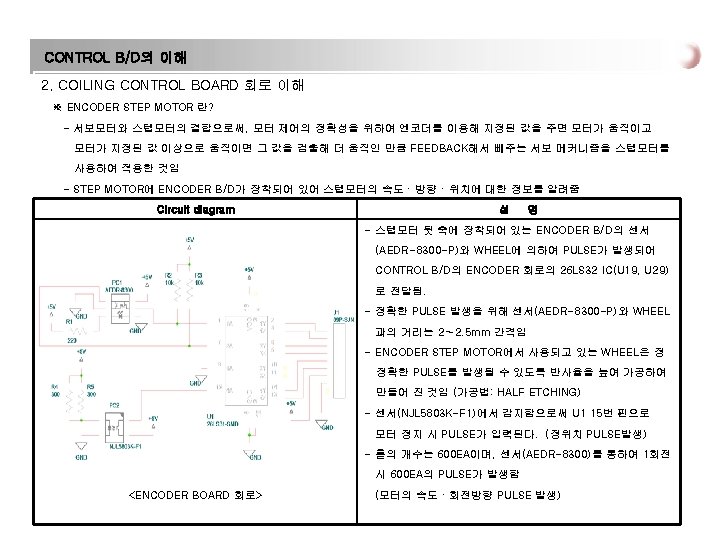
CONTROL B/D의 이해 2. COILING CONTROL BOARD 회로 이해 12) CONTROL B/D 내 ENCODER 회로 Circuit diagram 설 명 - CN 20에 연결되어 ENCODER B/D로 부터 입력된 PULSE는 U 19(26 LS 32) IC로 입력되어 각각 ENC_A, ENC_B, ENC_Z 로 출력되어 CPU에 전달된다. ※ CN 24와 U 29로 구성된 동일한 ENCODER 회로가 있다. - 26 LS 32 IC는 Quardruple Differential Line Recievers로써 입력되는 두 신호의 전압차로써 출력을 결정하는 역할을 하고 있음
- Slides: 20