Computer Vision Pattern Recognition Lab 6 Computer Vision

Computer Vision & Pattern Recognition Lab. 제 6장 정지영상 처리 Computer Vision & Pattern Recognition Lab.

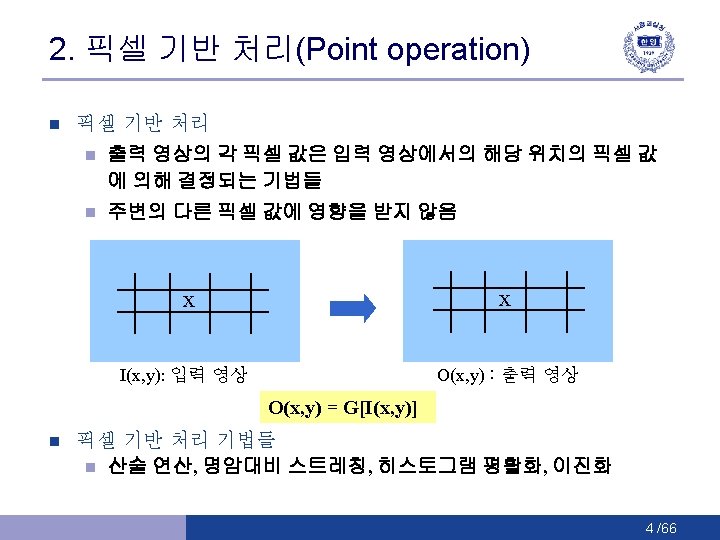

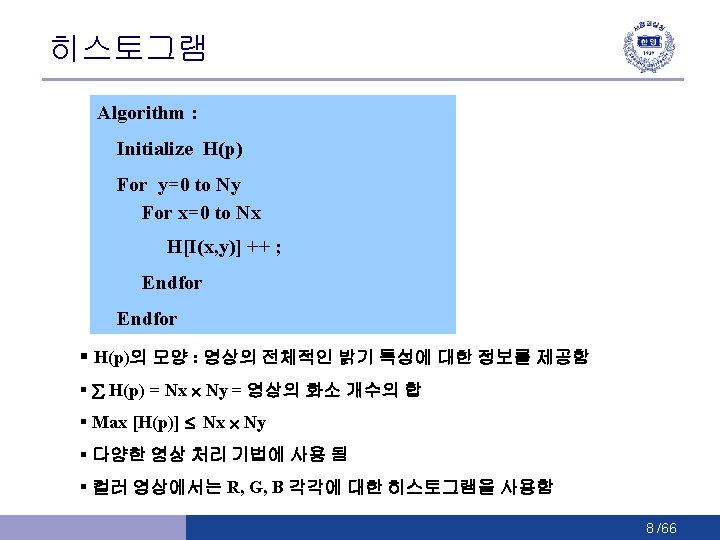
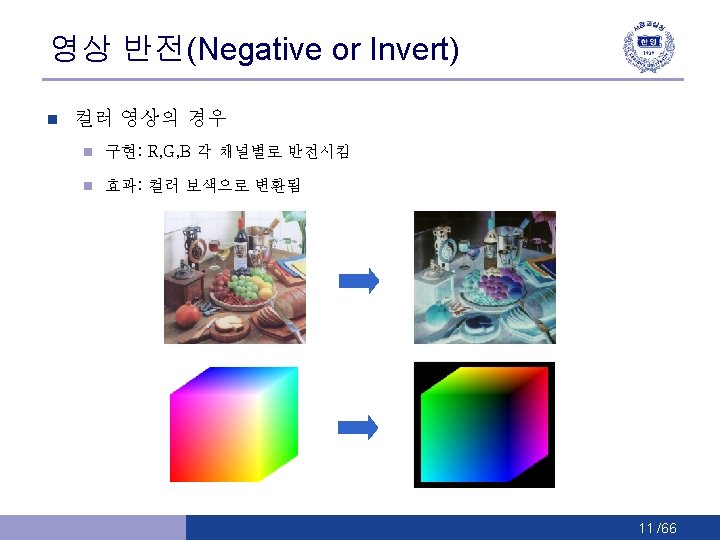
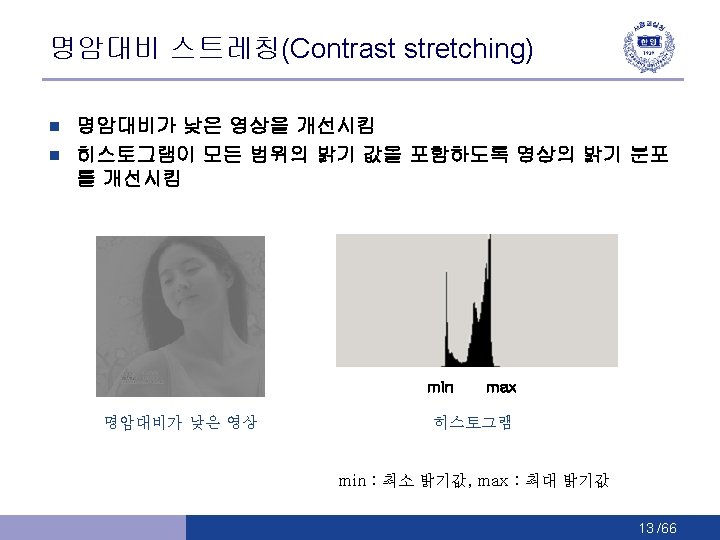
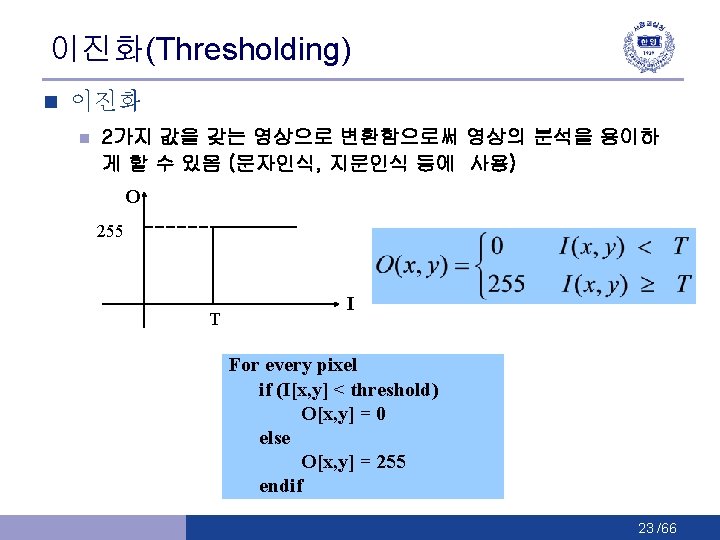
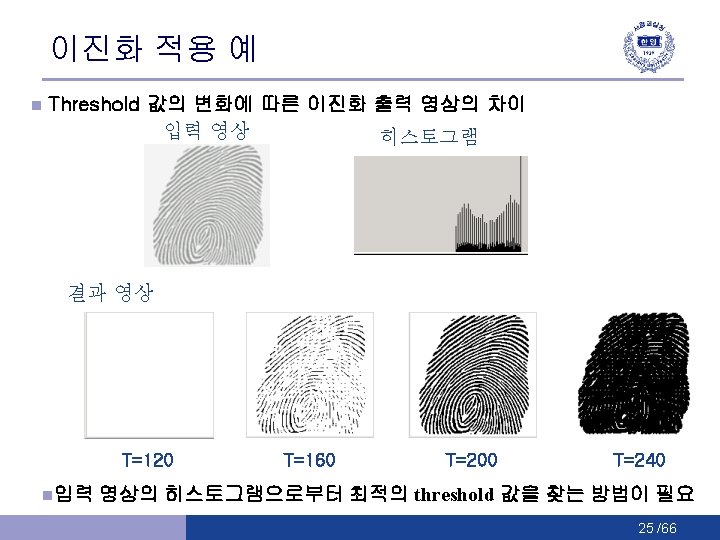
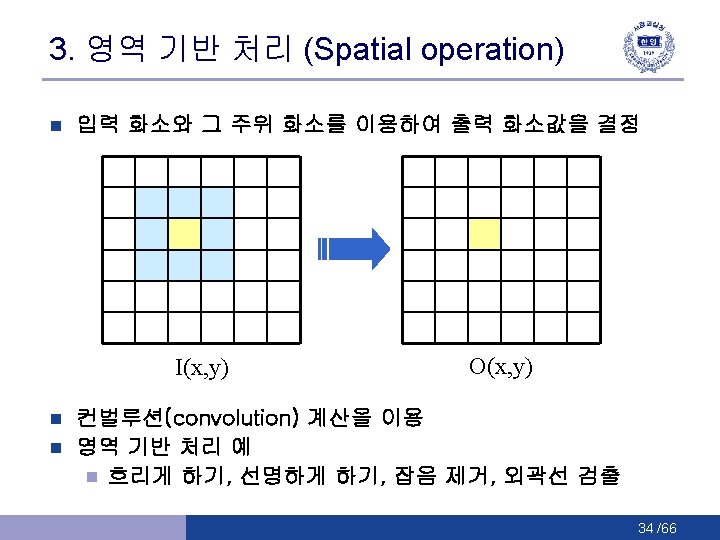
 n 밝은 화소는 어둡게, 어두운 화소는 밝게 변화시킴 O For")
영상 반전(Negative or Invert) n 밝은 화소는 어둡게, 어두운 화소는 밝게 변화시킴 O For y = 1 to Ny For x= 1 to Nx L O(x, y) = L - I(x, y) L: Max. of gray values (0, 1, …, L) I L 10 /66
![명암대비 스트레칭의 구현 알고리즘 Compute histogram H[i]; Compute min, max ; slope = 255](http://slidetodoc.com/presentation_image_h2/1706b06d53ae63062cc1ef299f0c909a/image-15.jpg "명암대비 스트레칭의 구현 알고리즘 Compute histogram H[i]; Compute min, max ; slope = 255")
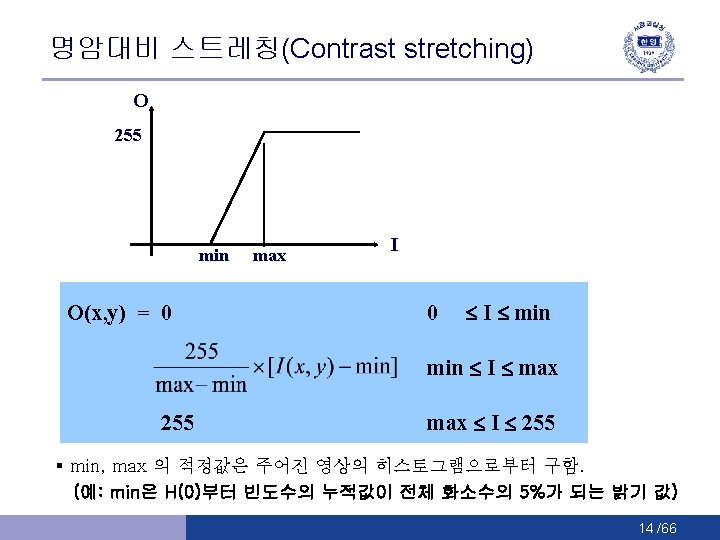
명암대비 스트레칭의 구현 알고리즘 Compute histogram H[i]; Compute min, max ; slope = 255 / (max-min); For y=0 to Ny For x=0 to Nx if [I(x, y) < min] O[x, y] = 0; else if [I(x, y) > max] O[x, y] = 255; else O[x, y] = ( I[x, y] - min ) * slope; endif Endfor 15 /66

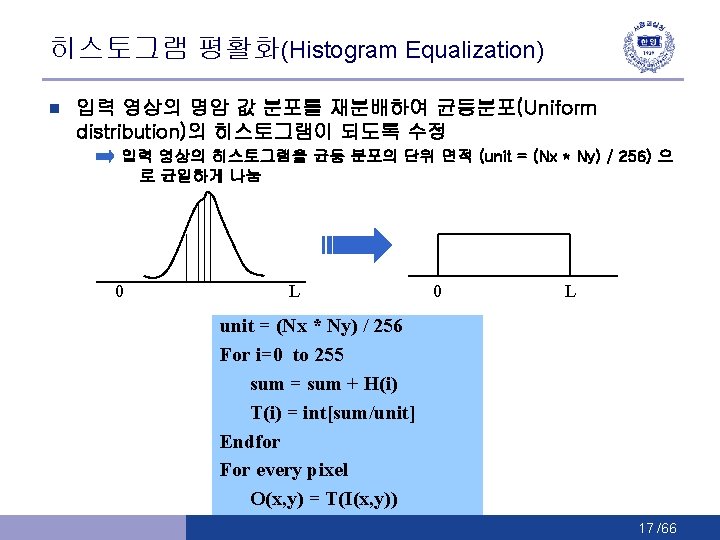

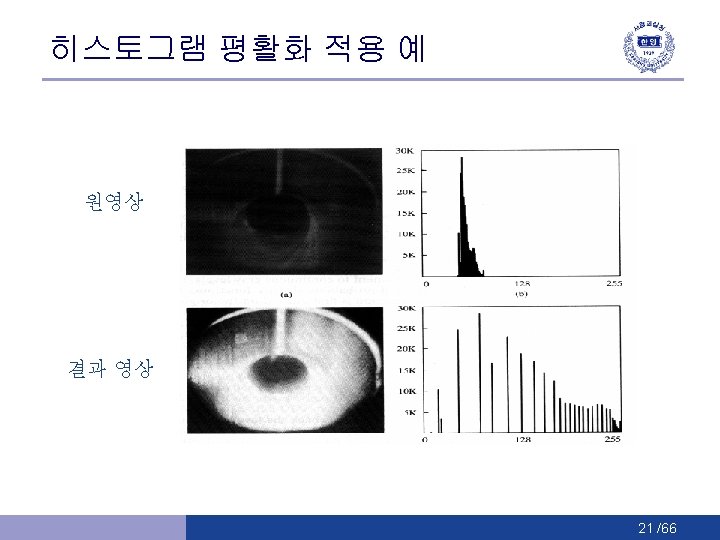
히스토그램 평활화 예 40 40 50 60 70 명암값 i 정규화 값 T[ i ] 40 50 60 70 70 80 40 3 30 50 6 61 60 10 102 60 70 70 80 90 100 원 영상 30 19 193 80 22 224 90 24 244 61 10 193 2 30 70 30 10 19 2 3 10 19 19 2 3 3 10 19 19 22 2 3 3 4 19 19 22 24 61 3 4 영상 4 결과 193 224 244 255 10 10 100 25 255 Unit = 25 / 256 5 0 누적 합 Sum [ i ] 40 50 60 70 80 90 100 5 0 30 61 102 193 224 244 25 5 19 /66


Chroma key 합성 Chroma key를 이용하여 두개의 입력 영상을 합성 Chroma key 의 컬러값을 입력 받음 n 합성 알고리즘 n For every pixel if (I 1[x, y] =Chroma key) O[x, y] = I 2[x, y] else O[x, y] = I 1[x, y] endif => I 1(x, y) I 2(x, y) O(x, y) 33 /66
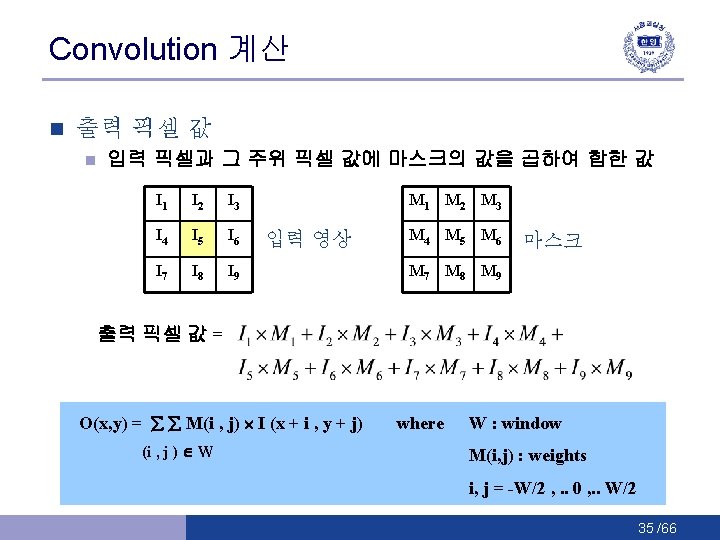

Convolution 계산 40 40 40 -1 50 5 50 -1 50 40 40 50 50 50 40 40 40 0 0 -1 -1 0 0 7 0 6 0 0 -1 5 -1 0 6 0 7 0 36 /66
![Convolution 계산 방법 n 알고리즘 n Initialize O[x, y] For y=W/2 to (Ny-W/2) For](http://slidetodoc.com/presentation_image_h2/1706b06d53ae63062cc1ef299f0c909a/image-40.jpg "Convolution 계산 방법 n 알고리즘 n Initialize O[x, y] For y=W/2 to (Ny-W/2) For")
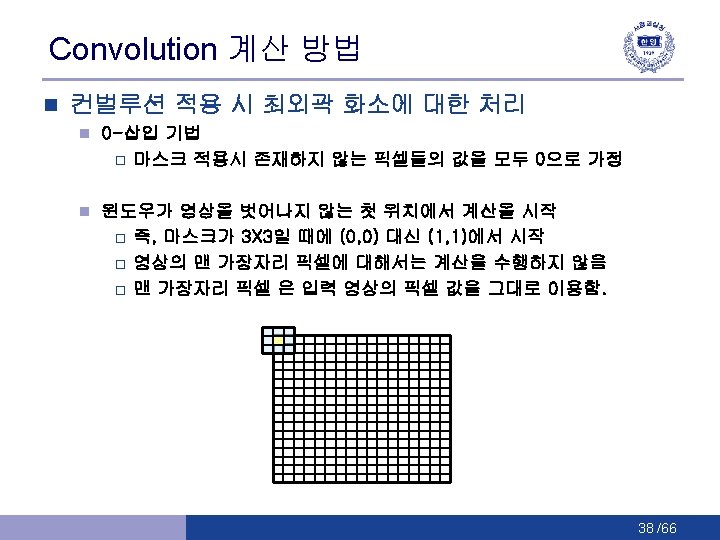
Convolution 계산 방법 n 알고리즘 n Initialize O[x, y] For y=W/2 to (Ny-W/2) For x= W/2 to (Nx-W/2) sum=0; For j= -W/2 to W/2 For i= -W/2 to W/2 sum = sum + M[i, j] * I[x+i, y+j] Endfor if (sum < 0) O[x, y] = 0; elseif (sum > 255) O[x, y] = 255; else O[x, y] = sum; Endfor 실제 프로그래밍에서는 M[i, j]의 index가 음수가 되지 않도록 주의 40 /66
 선명화 마스크 1 적용 0 -1 5 -1 0 10")
영상의 선명화 (Image sharpening) 선명화 마스크 1 적용 0 -1 5 -1 0 10 10 10 10 10 10 10 10 0 10 10 20 10 10 40 10 10 20 30 20 10 10 10 0 20 50 20 0 10 10 20 30 40 30 20 10 10 10 0 40 50 80 50 40 0 10 10 20 30 20 10 10 10 0 20 50 20 0 10 10 10 20 10 10 40 10 10 10 10 10 10 10 10 10 10 입력 영상 n 출력 영상의 ‘+’ 표시가 선명하게 두드러져 보 임 44 /66

 46 /66")
영상의 선명화 (Image sharpening) 46 /66

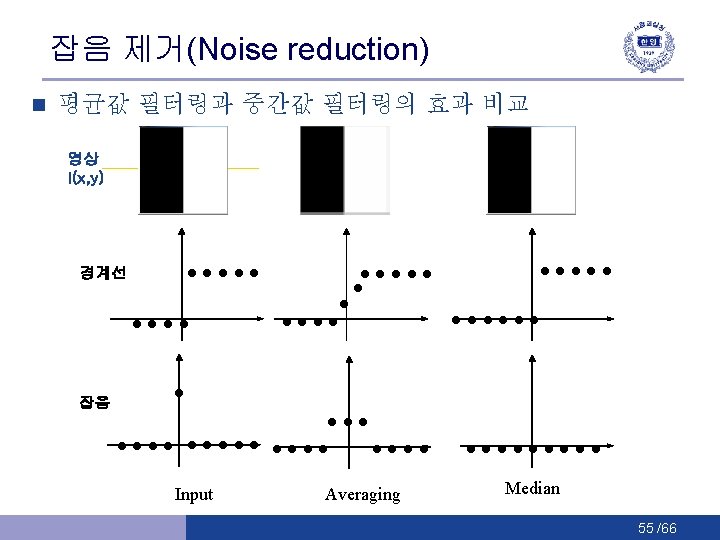

n 평균값 필터링과 중간값 필터링의 선명도 비교 Average Filtering Median filtering 56 /66


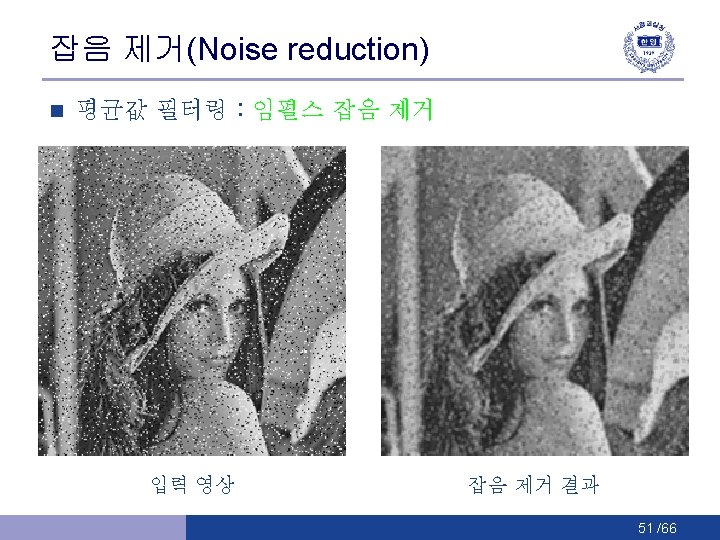
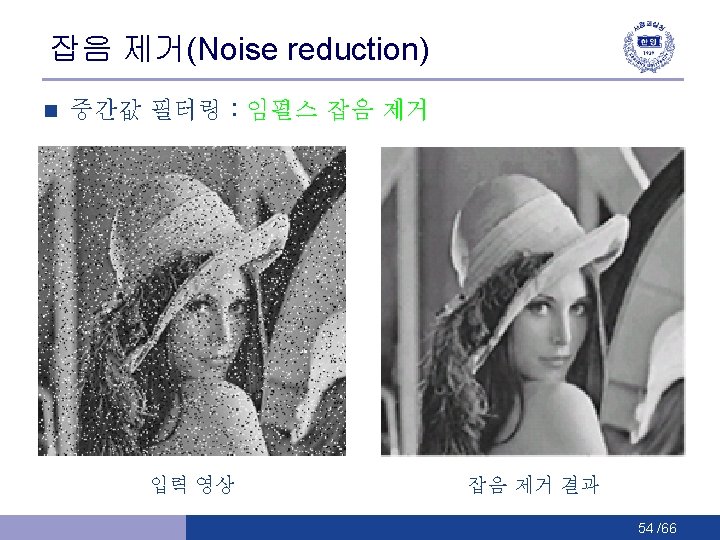
n 평균값 필터링과 중간값 필터링의 임펄스 잡음제거 Average Filtering Median filtering 58 /66
 59 /66")
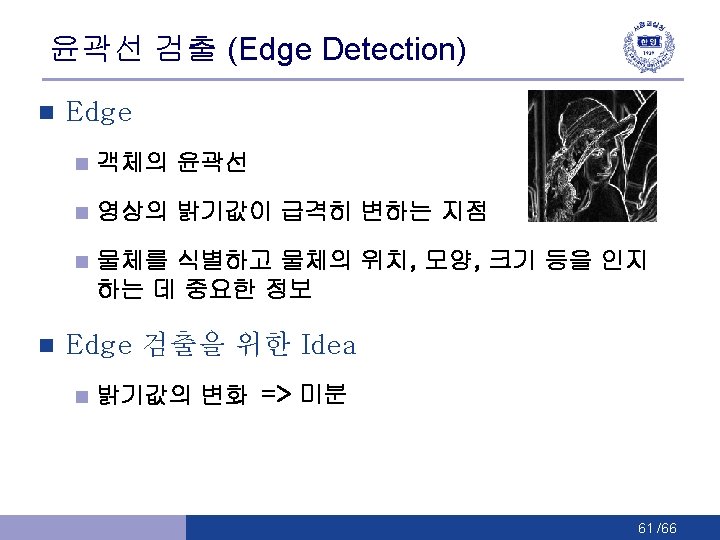
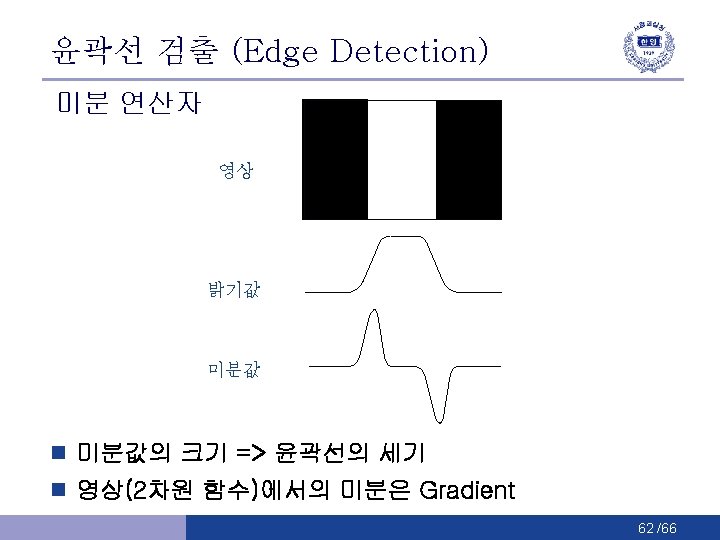
윤곽선 (Edge) 59 /66
 60 /66")
윤곽선 (Edge) 60 /66
 = n f(x, y) x f(x, y) ix +")
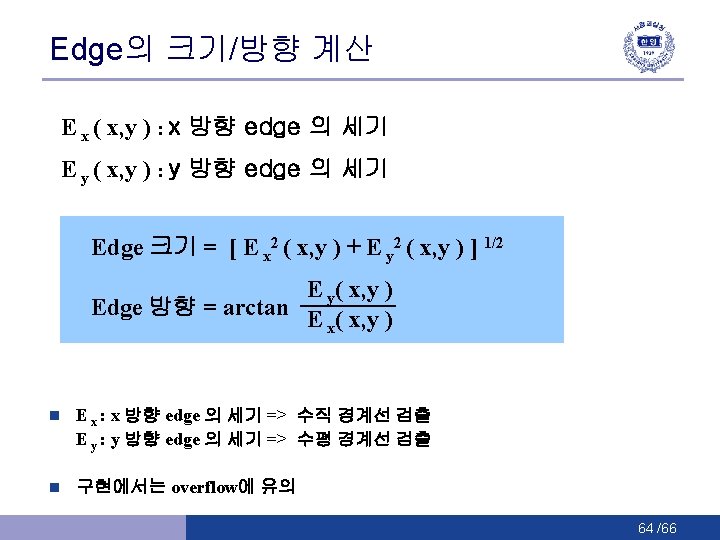
Gradient operation f (x, y) = n f(x, y) x f(x, y) ix + iy y x 방향 edge 의 세기 Ex (x, y) = f(x, y) x = = y 방향 edge 의 세기 Ey (x, y) f(x, y) Ey (x, y) = y ( p 2+p 5+p 8) – (p 0+p 3+p 6) f(x, y) * -1 0 1 p 0 p 1 p 2 p 3 p 4 p 5 p 6 p 7 p 8 n = = ( p 6+p 7+p 8) – (p 0+p 1+p 2) f(x, y) * -1 -1 -1 0 0 0 1 1 1 63 /66

Edge 검출 n Edge 검출을 위한 마스크 Ex Ey Prewitt Robert Sobel 65 /66

경계선 검출 결과 입력영상 Sobel Prewitt Roberts 66 /66
 2. 특징 기술자 (Feature")
4. 특징점 검출과 특징 기술자 1. 특징점 검출 (Keypoint extraction) 2. 특징 기술자 (Feature descriptor) 69 /66
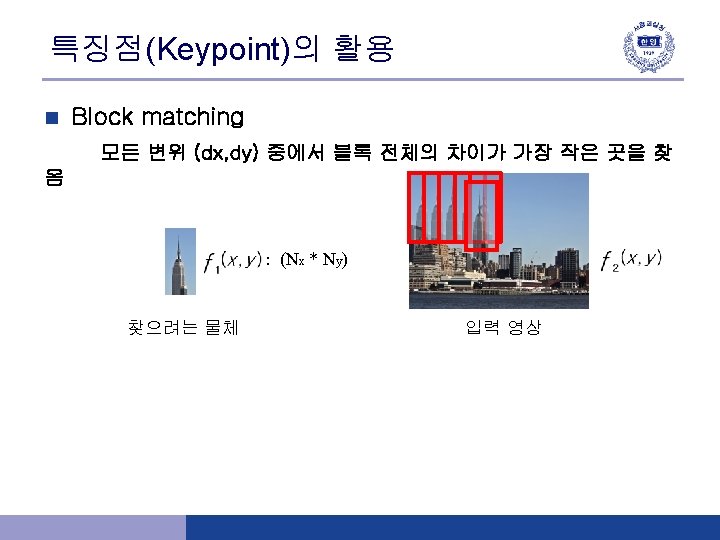
 f 2(x, y) f 1(x, y) (dx,")
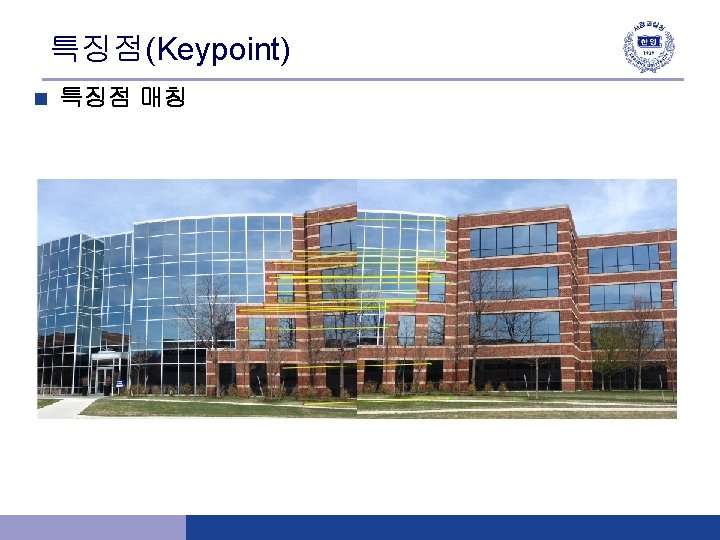
Block matching n Block Matching Algorithm (BMA) f 2(x, y) f 1(x, y) (dx, dy) Step 1: 모든 (dx, dy) 에 대해서 E(dx, dy) 를 계산 Step 2: E(dx, dy) 값이 최소가 되는 (dx, dy) 를 찾음 n Block matching의 한계점 2021 -12 -18 Computer Vision & Pattern Recognition Lab. 73 /34

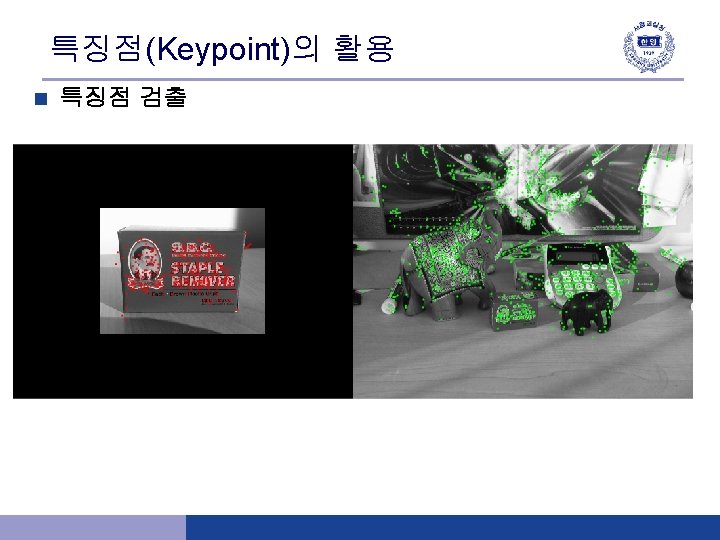




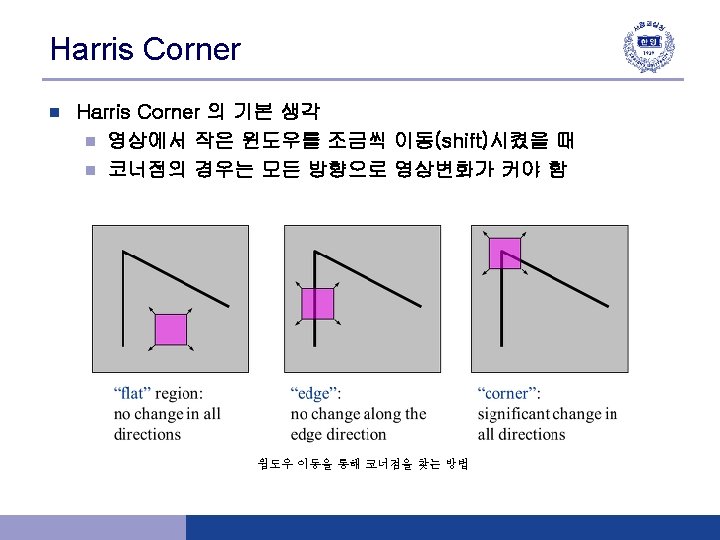

Harris Corner n

")
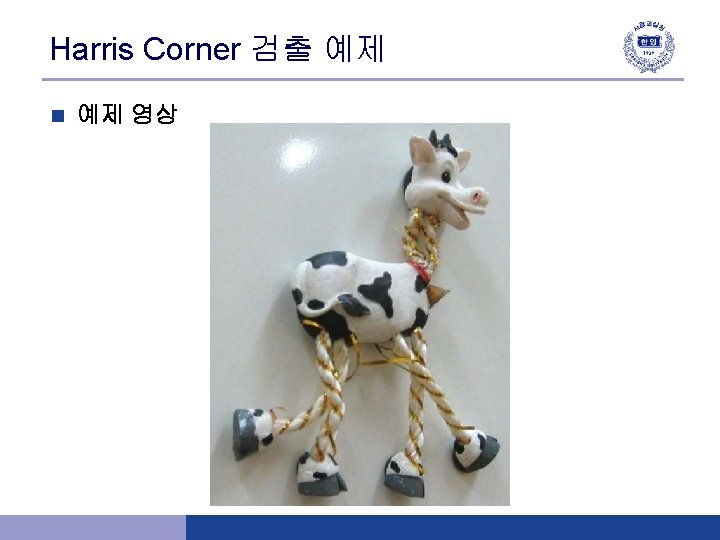
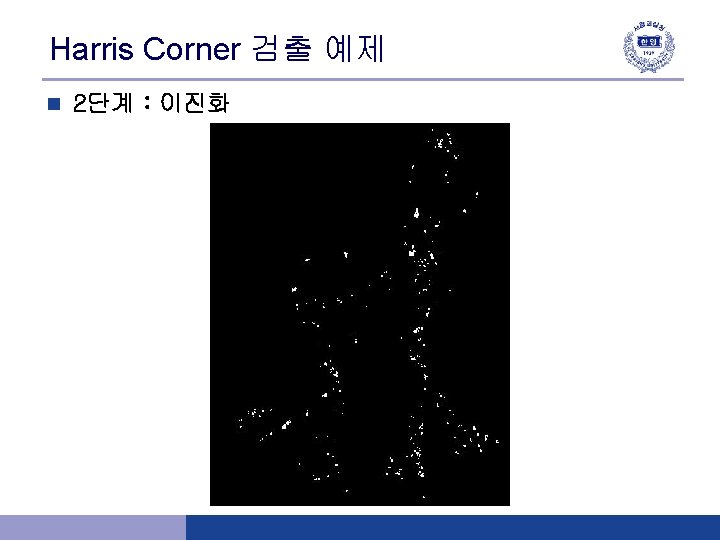
Harris Corner 검출 예제 n 3단계 : 비 최대 억제 (non-maxima suppression)

- Slides: 91