Computer Graphics Lecture 18 3 D TransformationsII Taqdees



 the coordinates")



")







: • x′ = x cosθ")


: x′ = x y′ = y")
: x′ = z sinθ + x")

. P")
. P")
. P")
 45 degrees clockwise about")











 Uniform Scaling w 2) Differential Scaling")


















. P")
 = X/D or")
 To")

 = cos ( q ) * cos (")
 =D*[cos ( q ) *")
 D= Y/sin(q) so we")
![w X`= [X / cos(q)] * cos (q) * cos(m) – ] *sin(q) *](https://slidetodoc.com/presentation_image/5bbf9e9353c68fc8cb3abe8f82c56fd0/image-72.jpg "w X`= [X / cos(q)] * cos (q) * cos(m) – ] *sin(q) *")

![w Y` = D*sin(q+m) = D*[sin(q) * cos(m) + cos(q) * sin(m)] = D*sin(q)](https://slidetodoc.com/presentation_image/5bbf9e9353c68fc8cb3abe8f82c56fd0/image-74.jpg "w Y` = D*sin(q+m) = D*[sin(q) * cos(m) + cos(q) * sin(m)] = D*sin(q)")
![w Y` = [ X/ cos(m)] * sin(q ) *cos(m) + [Y/sin(m) ] *](https://slidetodoc.com/presentation_image/5bbf9e9353c68fc8cb3abe8f82c56fd0/image-75.jpg "w Y` = [ X/ cos(m)] * sin(q ) *cos(m) + [Y/sin(m) ] *")
 around the Z axis through")


: x` = x * cos(m )")
: x` = x y` =")
: x` = x * cos(m)")

 | cos(m) | -sin(m) | 0 or P`")
 | 1 | 0 | 0 or 0")
 | cos(m) 0 | 0 1 | sin(m)")
- Slides: 85
Computer Graphics Lecture 18 3 -D Transformations-II Taqdees A. Siddiqi cs 602@vu. edu. pk
Rotation is the process of moving a point in space in a non-linear manner
Normalization Note that the process of moving the points so that the POV is at the origin looking down the +Z axis is called normalization.
For Rotation w Rotating a point requires that we know: – 1) the coordinates for the point, and – 2) the rotation angles
w We need to know three different angles: w How far to rotate around the X axis(YZ rotation, or “pitch”) w How far to rotate around the Y axis (XZ rotation, or “yaw”) w How far to rotate around the Z axis (XY rotation, or “roll”)
Rotating a Point
w w Repositions an object along a circular path in xy-plane Rotation Angle θ Rotation Point (xr, yr) θ is +ve counterclockwise rotation w θ is -ve clockwise rotation w θ is zero ?
w For simplicity, consider the pivot at origin and rotate point P (x, y) where x = r cos. Ф and y = r sin. Ф w If rotated by θ then: w x′ = r cos(Ф + θ) = r cos. Ф cosθ – r sin. Ф sinθ and w y′ = r sin(Ф + θ) = r cos. Ф sinθ + r sin. Ф cosθ
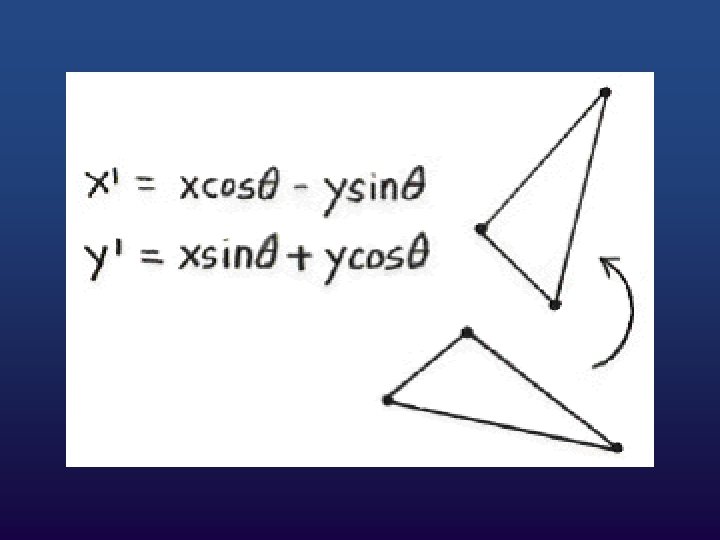
w Replacing r cos. Ф with x and r sin. Ф with y, we have: w x′ = x cosθ – y sinθ and w y′ = x sinθ + y cosθ
w Column vector representation: P′ = R. P w Where
Rotation: Homogeneous Coordinates The rotation can now be expressed using homogeneous coordinates as: Abbreviated as: P’ = R (θ) . P
… Now in 3 D w w Rotation can be about any of the three axes: About z-axis (i. e. in xy plane) About x-axis (i. e. in yz plane) About y-axis (i. e. in xz plane)
Roll : around z-axis
Pitch: around x-axis
Yaw: around y-axis
w Rotation about z-axis (i. e. in xy plane): • x′ = x cosθ – y sinθ • y′ = x sinθ + y cosθ • z’ = z
Alright, but what about rotations w. r. t. other axes? Cyclic Permutations of Coordinate Axes
Cyclic permutation
Rotation about x-axis (i. e. in yz plane): x′ = x y′ = y cosθ – z sinθ z′ = y sinθ + z cosθ
Rotation about y-axis (i. e. in xz plane): x′ = z sinθ + x cosθ y ′ = y z′ = z cosθ – x sinθ
Matrix Representations
Rotation about z-axis P` = Rz(θ). P
Rotation about x-axis P` = Rx(θ). P
Rotation about y-axis P` = Ry(θ). P
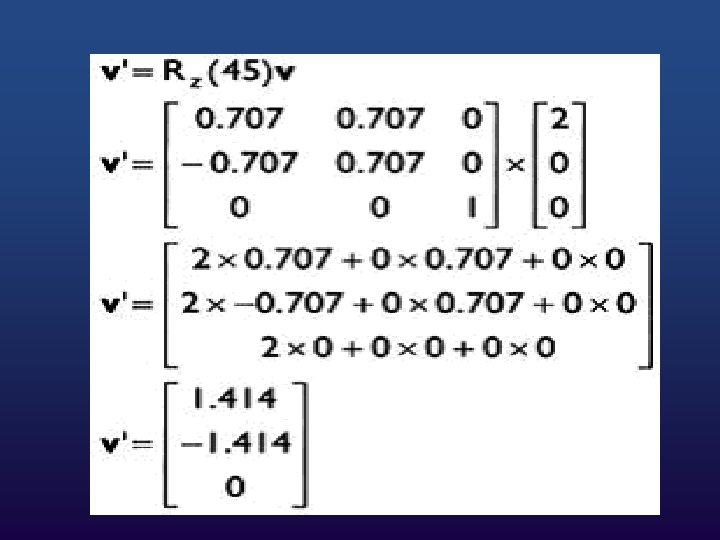
Example w Let's manually rotate the point (2, 0, 0) 45 degrees clockwise about the z axis
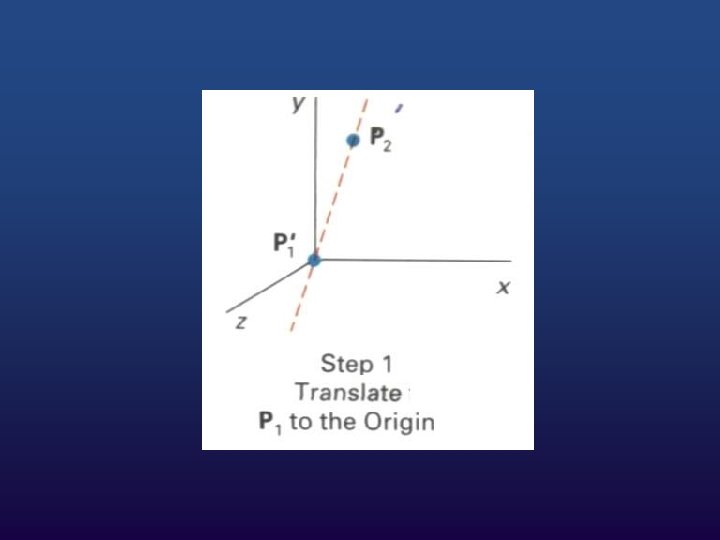
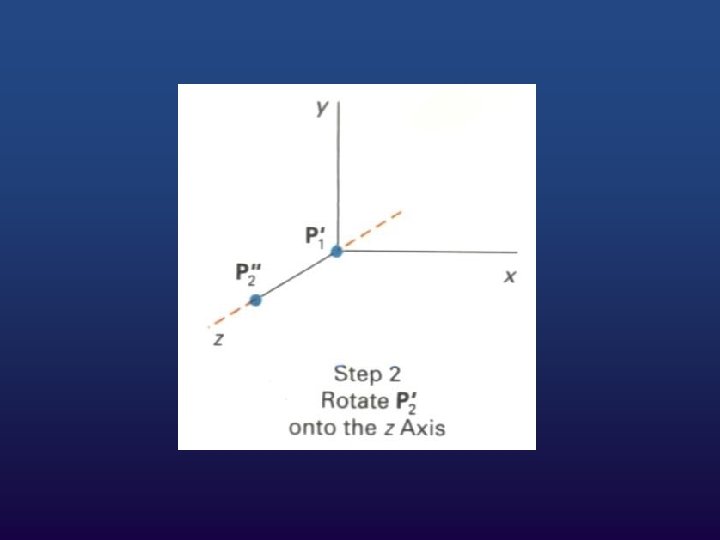
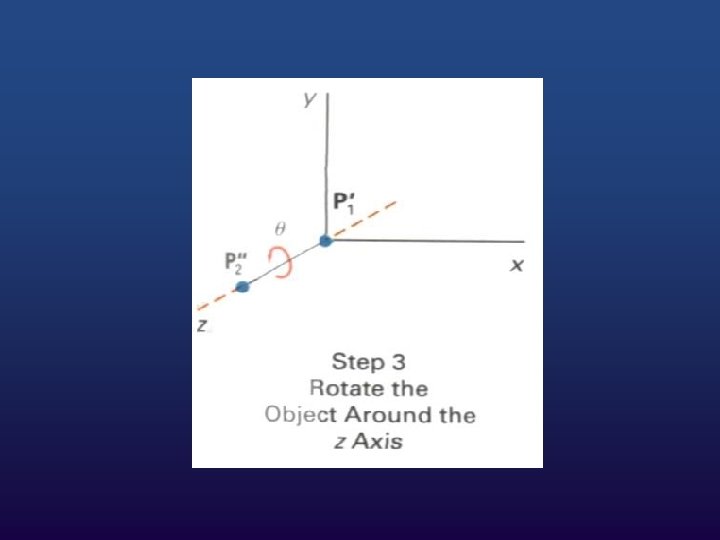
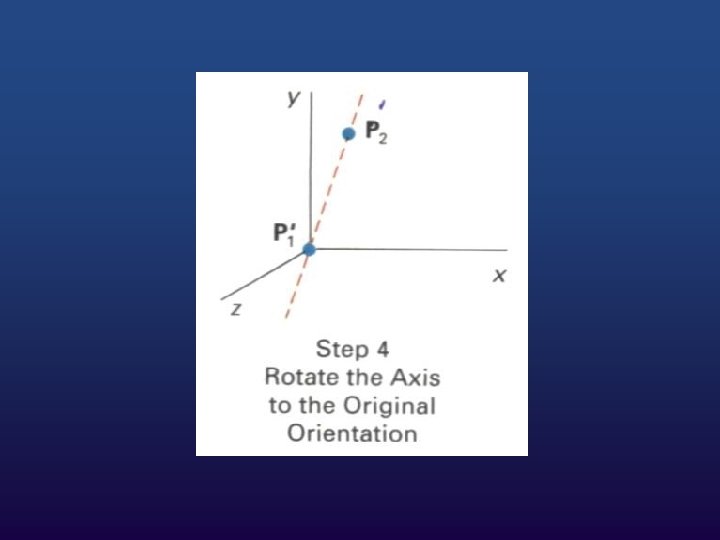
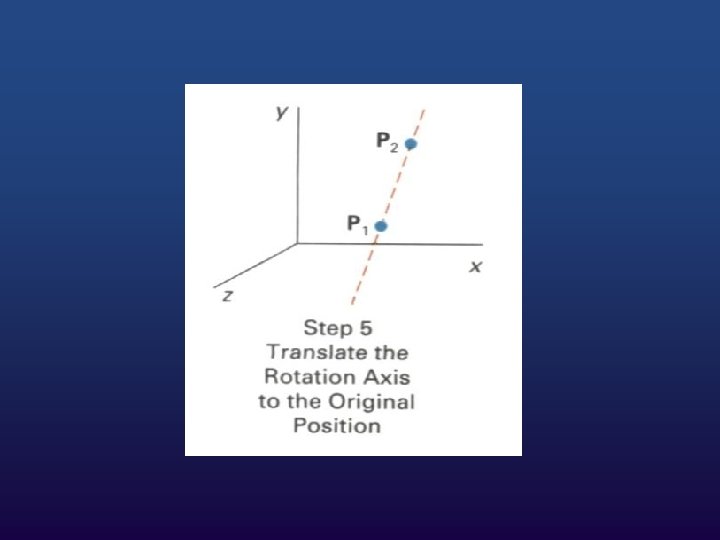
Around arbitrary axis
Around arbitrary axis
Around arbitrary axis
Around arbitrary axis
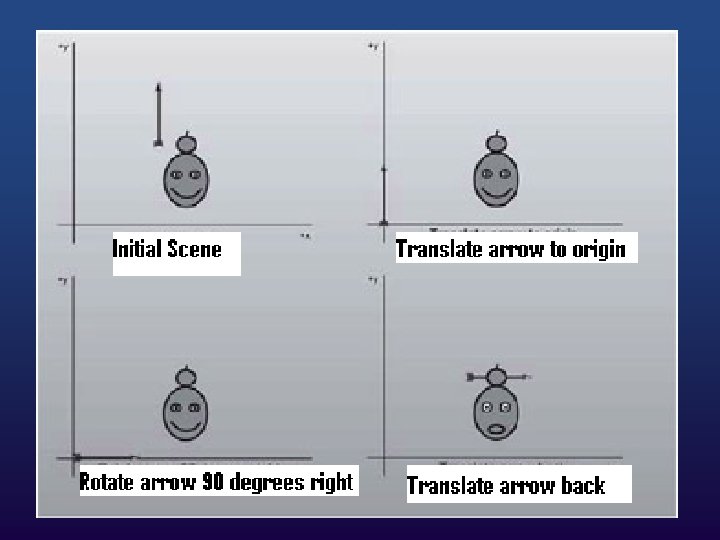
Composite Transformation Now you can take an object and apply a sequence of transformations to it to make it do whatever you want. All you need to do is figure out the sequence of transformations needed and then apply the sequence to each of the points in the model.
As an example, let's say you want to rotate an object sitting at a certain point p around its z axis. You would perform the following sequence of transformations to achieve this
Around arbitrary axis
Scaling
Scaling an object changes its size and repositions the object relative to the coordinate origin. If the transformation parameters are not all equal, relative dimensions in the object are changed
w Coordinate transformations for scaling relative to the origin are w X` = X. Sx w Y` = Y. Sy w Z` = Z. Sz
w 1) Uniform Scaling w 2) Differential Scaling
Uniform Scaling w We preserve the original shape of an object with a uniform scaling w ( Sx = Sy = Sz)
Differential Scaling w We do not preserve the original shape of an object with a differential scaling w ( Sx <> Sy <> Sz)
Scaling w. r. t. Origin
Scaling w. r. t. a fixed position Scaling with respect to a selected fixed position (Xf, Yf, Zf) can be represented with the transformation sequence:
Transformation sequence 1. 2. 3. Translate the fixed point to the origin. Scale the object relative to the coordinate origin Translate the fixed point back to its original position
Composite Transformation
Composite Transformation
Reflection A reflection can be performed relative to a selected reflection axis or with respect to a selected reflection plane.
In general, three-dimensional reflection matrices are set up similarly to those for two dimensions. Reflections relative to a given axis are equivalent to 180 degree rotations.
Reflection of points relative to the X axis
Reflection of points relative to the Y axis
Reflection of points relative to the xy plane
Shears
w Shearing transformations can be used to modify object shapes
w As an example of three-dimensional shearing, the following transformation produces a z-axis shear:
Y-axis shear
X-axis shear
Computer Graphics Lecture 18
Rotation w. r. t. y-axis: P` = Ry(θ). P
w From the drawing and elementary trigonometry, we can say: cos(q) = X/D or D = X /cos(q) sin(q) = Y/D or D = Y/sin(q)
where D = hypotenuse = length of vector from origin to (x, y) To rotate to our new point, we just add m to q For our new point, we know that: cos ( q + m) = X` / D sin ( q + m) = Y`/ D
w We can expand these using the addition formulas
cos ( q + m ) = cos ( q ) * cos ( m ) – sin( q ) * sin ( m )
X` = D * cos (q + m ) =D*[cos ( q ) * cos( m ) – sin ( q ) * sin ( m )] =D*cos ( q ) * cos ( m ) – D*sin ( q )*sin( m )
w w But we noted that D= X / cos(q) D= Y/sin(q) so we can substitute them in :
w X`= [X / cos(q)] * cos (q) * cos(m) – ] *sin(q) * sin(m) w = X * cos(m) – Y*sin(m) [Y/sin(q)
w And we can follow a similar approach to find Y`
w Y` = D*sin(q+m) = D*[sin(q) * cos(m) + cos(q) * sin(m)] = D*sin(q) * cos(m) + D*cos(q) * sin(m)
w Y` = [ X/ cos(m)] * sin(q ) *cos(m) + [Y/sin(m) ] * cos(q ) * sin(m) w = X * sin(q) + Y*cos(q)
w So to rotate the point (x, y, z) around the Z axis through an angle of M degrees, we use: w X` = x*cos(M) – y*sin(M) w Y` = x*sin(M) + y*cos(M) w Z` = z
w You see, in the above, we rotate M degrees around the Z axis (“roll”), moving from the +X axis to the +Y axis w But if you look down on the XY plane from the +Z axis, this is a –M degree rotation!
w you can go through a similar process to calculate the rotation formula for rotating around the X axis (“pitch”) and around the Y axis (“yaw”), ending up with:
w w Roll ( rotate around Z axis): x` = x * cos(m ) + y* sin(m) y` = y* cos(m) – x * sin(m) z` = z
w w Pitch ( rotate around the X axis): x` = x y` = y * cos(m) + z * sin(m) z` = z * cos(m) – y*sin(m)
w w Yaw ( rotate about the Y axis): x` = x * cos(m) – z * sin(m) y` = y; z` = x * sin(m) + z * cos(m)
Using Matrices for Rotation
Roll (rotate about the Z axis) | cos(m) | -sin(m) | 0 or P` = Rz(m). P sin(m) cos(m) 0 0 0 | 1 |
Pitch (rotate about the X axis) | 1 | 0 | 0 or 0 cos(m) -sin(m) 0 P` = Rx(m). P 0 sin(m) cos(m) 0 0 | 0 | 1 |
Yaw (rotate about the Y axis) | cos(m) 0 | 0 1 | sin(m) 0 | 0 or P` = Ry(m). P -sin(m) 0 cos(m) 0 0| 0| 0| 0 1|