Computer Graphics Chapter 12 Computer Animation LET US




")



































 Upper Leg Hip Rotate")











 (0,")

 (0, 0)")
")
 (0,")

 (0, 0)")


 Compute positions of end-effectors Inverse Kinematics “Goal-directed”")














 Compute end-effectors (easy) Inverse kinematics Animator")
- Slides: 78
Computer Graphics Chapter 12 Computer Animation
LET US ENTER INTO THE MAGICAL WORLD OF ANIMATION
Contents • • INTRODUCTION APPLICATIONS DESIGN OF ANIMATION SEQUENCES GENERAL COMPUTER ANIMATION FUNCTIONS RASTER ANIMATIONS COMPUTER ANIMATION LANGUAGES KEY FRAME SYSTEMS MOTION SPECIFICATIONS
Computer Animation What is Animation? Make objects change over time according to scripted actions What is Simulation? Predict how objects change over time according to physical laws 4
Introduction • Computer animation is the process used for generating animated images (moving images) using computer graphics. • Animators are artists who specialize in the creation of animation. • From Latin animātiō, "the act of bringing to life"; from animō ("to animate" or "give life to") and -ātiō ("the act of"). 2 D ANIMATION 3 D ANIMATION
APPLICATIONS Video games cartoon Mobile phones
Design Of Animation Sequences • Steps for designing animation sequences. 1. Storyboard Layout 2. Object definitions 3. Key frame specifications 4. Generation of in-between frames
Storyboard Layout
Object Definitions
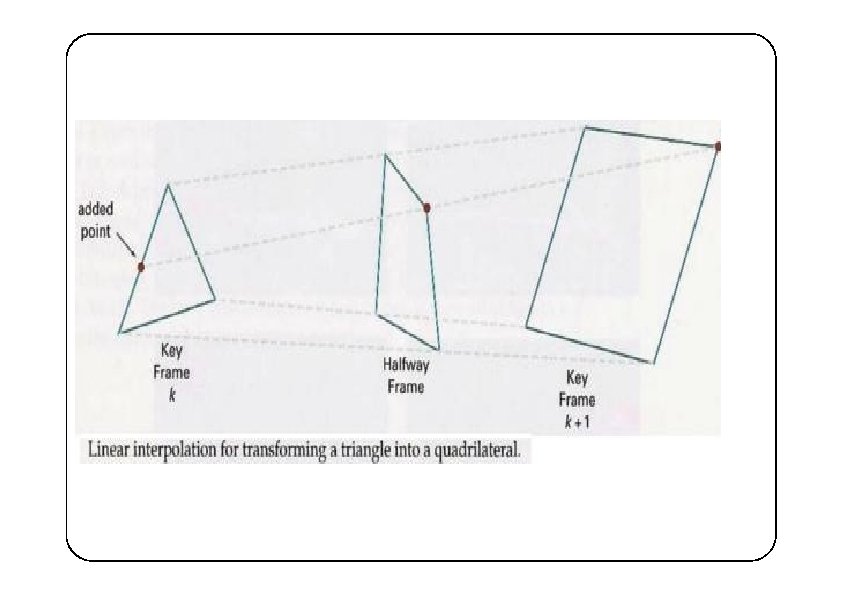
Key frame Specifications
In-between frames
GENERAL COMPUTER ANIMATION FUNCTIONS • Animation software provide basic functions to create animation and process the individual object. Manipulate data object database. FUNCTIONS Motion generation. Object rendering. Amorphium Art of illusion
Raster Animations Real-time animations can be generated using raster operations.
ORGANISATION OF A VIDEO COLOUR TABLE 0 1 0 0 0 1 41 H 65 255 24 -bit 65 0 0 0 1 0 0 0 0 Pixel value 0 Red Green Blue Monitor
Computer Animation Languages • GENERAL PURPOSE LANGUAGES: • C, C++, Pascal, or Lisp(control animation sequences).
SPECIALIZED ANIMATION LANGUAGES • Key frame systems • Parameterized systems • Scripting systems
Key frame Systems
Motion Specifications • Various ways in which motions of objects ca be specified as: • Direct Motion Specification. • Goal-Directed Systems. • Kinematics and Dynamics.
Direct Motion Specification
Goal Directed System
Kinematics and Dynamics • KINEMATICS: • Motion parameters such as position , velocity and acceleration are specified without reference to the forces. • INVERSE KINEMATICS: • Initial and final positions of objects at specified times and from that motion parameters. • DYNAMICS: • The forces that produce the velocities and accelerations are specified(physically based modeling). • It uses laws such as Newton’s laws of motion , Euler or Navier -stokes equations.
Outline Principles of Animation Keyframe Animation Articulated Figures 23
Principle of Traditional Animation • • • Squash and Stretch Slow In and Out Anticipation Exaggeration Follow Through and Overlapping Action Timing Staging Straight Ahead Action and Pose-to-Pose Action Arcs Secondary Action Appeal 24
Squash and Stretch Squash 25
Slow In and Out 26
Anticipation 27
Computer Animation Pipeline • • • 3 D modeling Motion specification Motion simulation Shading, lighting, & rendering Postprocessing 28
Outline Principles of Animation Keyframe Animation Articulated Figures 29
Keyframe Animation Define Character Poses at Specific Time Steps Called “Keyframes” 30
Keyframe Animation Interpolate Variables Describing Keyframes to Determine Poses for Character in between 31
Inbetweening Linear Interpolation • Usually not enough continuity 32
Inbetweening Spline Interpolation Maybe good enough 33
Inbetweening Spline Interpolation • Maybe good enough • May not follow physical laws 34
Inbetweening Spline Interpolation • Maybe good enough • May not follow physical laws 35
Inbetweening Inverse Kinematics or Dynamics 36
Outline Principles of Animation Keyframe Animation Articulated Figures 37
Articulated Figures Character Poses Described by Set of Rigid Bodies Connected by “Joints” Base Arm Hand Scene Graph 38
Articulated Figures Well-Suited for Humanoid Characters 39
Articulated Figures Joints Provide Handles for Moving Articulated Figure 40
Inbetweening Compute Joint Angles between Keyframes consider the length constancy Right 41 Wrong
Example: Walk Cycle Articulated Figure: Hip Upper Leg (Hip Rotate) Upper Leg Hip Rotate Knee Lower Leg Ankle Foot 42 Lower Leg (Knee Rotate) Hip Rotate + Knee Rotate Foot (Ankle Rotate)
Example: Walk Cycle Hip Joint Orientation: 43
Example: Walk Cycle Knee Joint Orientation: 44
Example: Walk Cycle Ankle Joint Orientation: 45
Challenge of Animation Temporal Aliasing • Motion blur 46
Temporal Ailasing Artifacts due to Limited Temporal Resolution • Strobing • Flickering 47
Temporal Ailasing Artifacts due to Limited Temporal Resolution Strobing • Flickering • 48
Temporal Ailasing Artifacts due to Limited Temporal Resolution • Strobing • Flickering 49
Temporal Ailasing Artifacts due to Limited Temporal Resolution • Strobing • Flickering 50
Motion Blur Composite Weighted Images of Adjacent Frames • Remove parts of signal under-sampled in time 51
Summary Animation Requires. . . • • • Modeling Scripting Inbetweening Lighting, shading Rendering Image processing 52
Overview Kinematics • Consider only motion • Determined by positions, velocities, accelerations Dynamics • Consider underlying forces • Compute motion from initial conditions and physics 53
Example: 2 -Link Structure Two Links Connected by Rotational Joints “End-Effector” X=(x, y) (0, 0) 54
Forward Kinematics Animator Specifies Joint Angles: Q 1 and Q 2 Computer Finds Positions of End-Effector: X X=(x, y) (0, 0) X=(l 1 cos Q 1+ l cos(Q 1+Q 2), l sin. Q 1+ l sin(Q 1+Q 2)) 55 2 1 2
Forward Kinematics Joint Motions can be Specified by Spline Curves X=(x, y) (0, 0) 56
Forward Kinematics Joint Motions can be Specified by Initial Conditions and Velocities X=(x, y) (0, 0) 57
Example: 2 -Link Structure What If Animator Knows Position of “End-Effector” X=(x, y) (0, 0) 58
Inverse Kinematics Animator Specifies End-Effector Positions: X Computer Finds Joint Angles: Q 1 and Q 2 X=(x, y) (0, 0) 59
Inverse Kinematics End-Effector Postions can be Specified by Spline Curves X=(x, y) (0, 0) 60
Inverse Kinematics Problem for More Complex Structures System of equations is usually under-defined Multiple solutions X=(x, y) (0, 0) Q , Q 3 Three unknowns: 1 2 Two equations: x, y 61
Inverse Kinematics Solution for More Complex Structures Find best solution (e. g. , minimize energy in motion) Non-linear optimization X=(x, y) (0, 0) 62
Summary Forward Kinematics Specify conditions (joint angles) Compute positions of end-effectors Inverse Kinematics “Goal-directed” motion Specify goal positions of end effectors Compute conditions required to achieve goals Inverse kinematics provides easier specification for many animation tasks, but it is computationally more difficult 63
Overview Kinematics Consider only motion Determined by positions, velocities, accelerations Dynamics Consider underlying forces Compute motion from initial conditions and physics 64
Dynamics Simulation of Physics Insures Realism of Motion 65
Space Time Constraints Animator Specifies Constraints What the character’s physical structure is e. g. , articulated figure What the character has to do e. g. , jump from here to there within time t What other physical structures are present e. g. , floor to push off and land How the motion should be performed e. g. , minimize energy 66
Space Time Constraints Computer Finds the “Best” Physical Motion Satisfying constraints Example: Particle with Jet Propulsion x(t) is position of particle at time t f(t) is force of jet propulsion at time t Particle’s equation of motion is: Suppose we want to move from a to b within t 0 to t 1 with minimum jet fuel: 67
Space Time Constraints Discretize Time Steps 68
Space Time Constraints Solve with Iterative Optimization Methods 69
Space Time Constraints Advantages Free animator from having to specify details of physically realistic motion with spline curves Easy to vary motions due to new parameters and/or new constraints Challenges Specifying constraints and objective functions Avoiding local minima during optimization 70
Space Time Constraints Adapting Motion Original Jump Heavier Base 71
Space Time Constraints Adapting Motion Hurdle 72
Space Time Constraints Adapting Motion Ski Jump 73
Space Time Constraints Editing Motion Original 74 Adapted
Space Time Constraints Morphing Motion The female character morphs into a smaller character during her spine 75
Space Time Constraints Advantages Free animator from having to specify details of physically realistic motion with spline curves Easy to vary motions due to new parameters and/or new constraints Challenges Specifying constraints and objective functions Avoiding local minima during optimization 76
Dynamics Other Physical Simulations Rigid bodies Soft bodies Cloth Liquids Gases etc. Cloth Hot Gases cgvr. korea. ac. kr 77
Summary Kinematics Forward kinematics Animator specifies joints (hard) Compute end-effectors (easy) Inverse kinematics Animator specifies end-effectors (easier) Solve for joints (harder) Dynamics Space-time constraints Animator specifies structures & constraints (easiest) Solve for motion (hardest) Also other physical simulations 78