COMMUNICATION PROTOCOLS 16 MARKS Need of Communication Interface













 is a vehicle bus standard")


- Slides: 18
COMMUNICATION PROTOCOLS 16 MARKS
Need of Communication Interface? • For data processing between edd. System & Host • To transmit/receive data to other systems • Multiprocessor communication • IOT application • Mobile devices interaction • For software upgradation
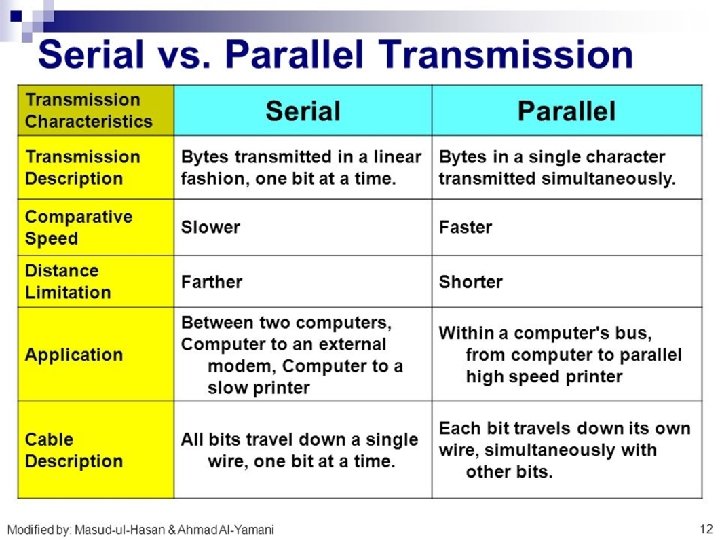
Serial Vs Parallel Communication
Synchronous Vs Asynchronous Communication
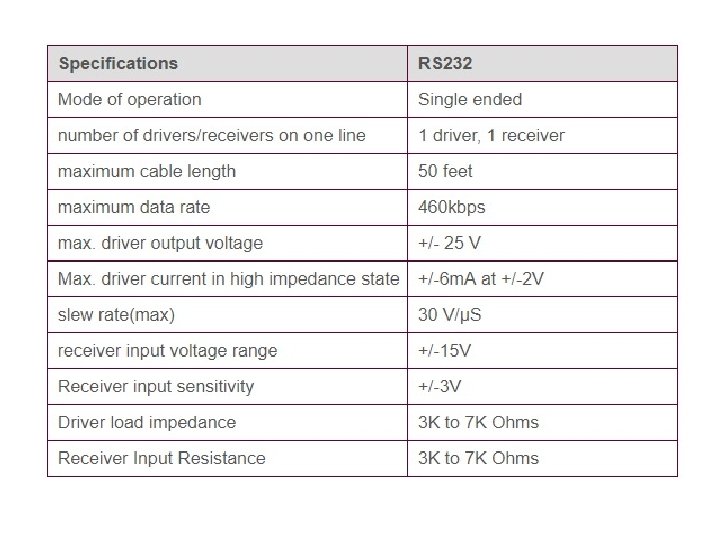
RS 232 DB 9 Connector
Communication Protocols • It is the system of digital rules for data exchange within or between devices. • Requirement of Communication protocol: 1. Data format 2. Address format 3. Detection of error 4. Acknoledgement
Classification Communication Protocols Wired Serial Wireless Parallel IRDA Bluetooth Zigbee IEEE 802. 11
Serial Communication protocols • • • I 2 C CAN USB SPI SSP
I 2 C Serial Communication protocol • • I 2 C= Inter Integrated Circuit Multi master two wire bus Speed 100 kbps to 450 kbps Signal transmission by two lines data & clock SCL, SDA.
Message frame format
ADVANTAGES • Only uses two wires • Supports multiple masters and multiple slaves • ACK/NACK bit gives confirmation that each frame is transferred successfully • Hardware is less complicated than with UARTs • Well known and widely used protocol
Disadvantages • Slower data transfer rate than SPI • The size of the data frame is limited to 8 bits • More complicated hardware needed to implement than SPI
Application • Onboard communication between Two IC’s like microcontroller & RTC.
CAN PROTOCOL • A Controller Area Network (CAN bus) is a vehicle bus standard designed to allow microcontrollers and devices to communicate with each other in applications without a host computer.
CAN Bus Protocol
CAN Architecture