Cobstacle for a Translational Robot configuration collision Minkowski

C-obstacle for a Translational Robot configuration collision
 – Albert Einstein was his former student.")
Minkowski Sum Hermann Minkowski (1864 -1909) – Albert Einstein was his former student.

Minkowski Sum of 1 D Sets

Minkowski Sum of 2 D Sets

Negation of a Set

Formula for C-obstacle
")
Proof (cont’d)

Verification via an Example Two equivalent ways of C-obstacle construction: Straightforward via Minkowski sum

Extreme Points

Minkowski Sum of Convex Polygons

Complexity of Minkowski Sum Proof Convexity of the Minkowski sum of two convex sets follows from the definition.

Computation of the Minkowski Sum Brute-force algorithm

Faster Computation Idea: Look at a pair of vertices that are extreme in the same direction. Represent all the directions by a unit circle.

Extreme Pairs Superpose the two partitioning. This works like the merge step of merge sort!

The Algorithm

Case 2

Case 3

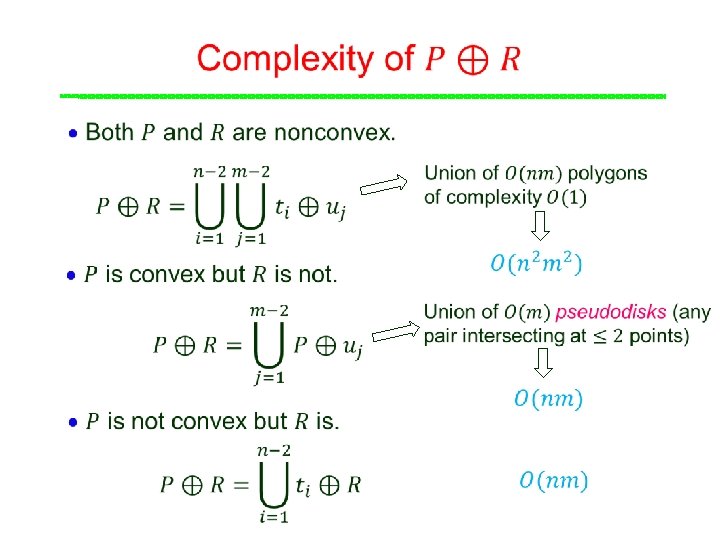
Nonconvex Robot or Obstacle Triangulate whichever is nonconvex.

Translational Motion Planning We are given

Computing the Forbidden C-Space Divide-and-conquer

Time Complexity for Path Planning Total preprocessing time:
- Slides: 22