CIRCUIT ou dbut dautomatique appliqu des circuits lectriques

« CIRCUIT » ou début d’automatique, appliqué à des circuits électriques Enseignement pour public ayant déjà eu la remise à niveau Sur chaque thème, ou chapitre : rapides rappels, applications dans le domaine e. e. a. Balayage rapide, (4 séances d’ 1 heure 30) en cohérence avec le contenu des T. D. et T. P. Objectifs : - remettre à niveau pour une exploitation immédiate (TD, TP) et ultérieure (ERII 3, ERII 4…), - identifier ce qui fondamental et qui doit être connu sans aucune lacune ni ambiguïté

« CIRCUIT » Avis aux utilisateurs de ce document power point : - Lancer le diaporama (touche F 5) - Lire attentivement les pages progressivement, par action de la touche -> (ou de la touche flèche vers le bas) - A chaque point d’interrogation tournant : une question, ou une application numérique, est demandée. Alors, marquer un temps d’arrêt pour répondre… Et continuer après la réflexion

« CIRCUIT » Transformées de Laplace Analyse harmonique Quadripôles

TRANSFORMEES DE LAPLACE Définition, propriétés Application à l’électronique

TRANSFORMEES DE LAPLACE Définition, propriétés Application à l’électronique

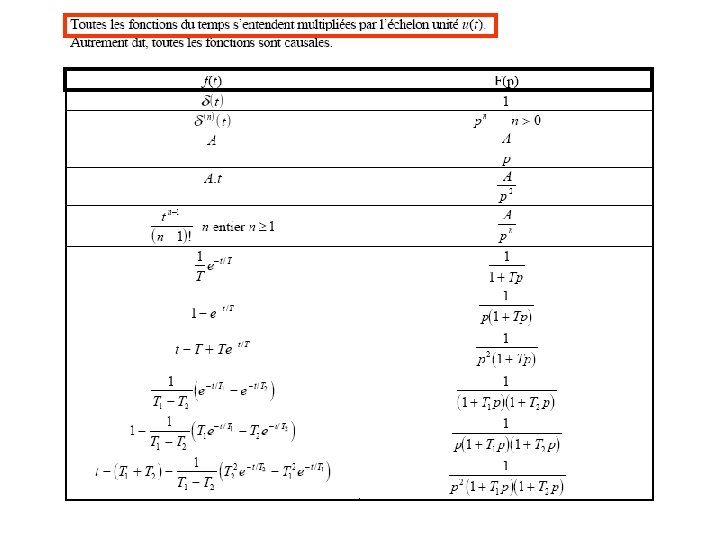
La transformée de Laplace consiste à étudier le comportement des systèmes par une représentation symbolique. La variable n'est plus le temps t mais p. A une fonction f(t) dans le monde réel correspond une fonction F(p) dans le monde symbolique. Cette fonction est appelée : image de f(t). Inversement f(t) est appelée : originale de F(p). Ce passage du monde réel au monde symbolique est défini par la transformée de Laplace suivante: Sous réserve de convergence Remarque : il existe des conditions d’existence de F(p). Toutes les fonctions f(t) n’ont pas une transformée de Laplace. Et réciproquement, toutes les fonctions F(p) ne sont pas des transformées de Laplace de f(t).

Transformées de Laplace des principaux signaux Fonction de Heavyside = 1 si t > 0 = 0 si t < 0 appelée échelon unité, qui s’écrit usuellement u(t) ou Г(t) Définition :

Rampe unitaire = t si t > 0 = 0 si t < 0 Par définition Intégration parties : Par ∫ u dv = [ u v ] – ∫ v du u = t dv = exp (-pt) dt du = dt v = -(1/p) exp (-pt) = [0 – 0] [0 – 1] 1 p 2
 si t > 0 = 0 si t <")
Fonction Exponentielle = exp (at) si t > 0 = 0 si t < 0 Par définition = Il faut que (a-p) soit < 0 pour que lim exp(a-p)t converge t->∞ Dans ces conditions, F(p) = 1 [0 – 1] (a-p) = 1 p-a
 si t > 0 = 0 si t <")
Fonction sinus = sin (ωt) si t > 0 = 0 si t < 0 Par définition Intégration parties : u = sin (ωt) dv = exp (-pt) dt [0 – 0] Par ∫ u dv = [ u v ] – ∫ v du du = ω cos (ωt) dt v = -(1/p) exp (-pt)
![Fonction sinus, suite F(p) = Par ∫ u dv = [ u v ]](http://slidetodoc.com/presentation_image/0f088de8ac19abf883f1173db5e2f016/image-11.jpg "Fonction sinus, suite F(p) = Par ∫ u dv = [ u v ]")
Fonction sinus, suite F(p) = Par ∫ u dv = [ u v ] – ∫ v du Intégration parties : u = cos (ωt) dv = exp (-pt) dt On arrive à : [0 – 1] -p = du = - ω sin (ωt) dt v = -(1/p) exp (-pt) 1 - p F(p) = D’où : = F(p) ω p 1 p ω ( 1 ω - p F(p) = p ω p 2 + ω2 F(p) )= ω p 2 - ω2 p 2 F(p)

Autre calcul, bien plus rapide : On a vu que : L { exp –at } = 1 p+a Reprenons cette écriture en remplaçant a par jω, avec ω constante : L { exp -jωt } = 1 p-jω = 2 2 p+jω p +ω p jω = 2 2 - 2 2 p +ω Or : exp -jωt = cos ωt – j sin ωt L { exp -jωt } = L { cos ωt - j sin ωt } Et, par linéarité : L {exp -jωt} ) = L{cos ωt} – j L{sin ωt} Par identification : p L{cos ωt} = p 2+ω2 L{sin ωt} = ω p 2+ω2 déjà vu

Il existe des formulaires de transformées de Laplace.

Principales Propriétés des Transformées de Laplace Linéarité : Il suffit de se rappeler de la définition… Par développement et l’intégrale d’une somme est la somme des intégrales. Très utilisée lors des calculs des transformées

Principales Propriétés des Transformées de Laplace d’une dérivée Intégration parties : Appliquons à notre calcul u = exp (-pt) dv = f’(t) dt Par ∫ u dv = [ u v ] – ∫ v du du = (-p) exp (-pt) dt v = f(t) = F(p) L {f’(t)} = p F(p) – f(0+)
} = F(p) £")
Principales Propriétés des Transformées de Laplace d’une dérivée, suite £ {f(t)} = F(p) £ {f’(t)} = p F(p) – f(0+) £ {f’’(t)} = p [ p F(p) – f(0+) ] – f’(0+) £ {f’’’(t)} = p {p [p F(p) – f(0+) ] – f’(0+)} – f’’(0+)

Principales Propriétés des Transformées de Laplace d’une intégration u variable d’intégration Posons : soit : =0 Par la page précédente : D’où : or : L {∫f(t)} = F(p) p
 u(t) f(t- ) u(t-")
Principales Propriétés des Transformées de Laplace Théorème du retard f(t) u(t) f(t- ) u(t- ) La transformée de Laplace de la fonction retardée est : Posons x = t- Changement de variable La transformée s’écrit : = dx = dt t = x + Quand t parcours à l’infini, x parcours de 0 à l’infini = x : variable d’intégration

Principales Propriétés des Transformées de Laplace Théorème de l’amortissement, ou multiplication par l’exponentielle Ecriture de F(p) dans laquelle on a remplacé p par p+k

Principales Propriétés des Transformées de Laplace Théorème de la valeur initiale Théorème de la valeur finale Si elle existe,

Principales Propriétés des Transformées de Laplace Transformée de Laplace d’une fonction périodique une fonction f(t) périodique de période T, faite de motifs g(t) G(p) est la transformée de Laplace de g(t), alors F(p) la transformée de f(t) s’écrit :

Principales Propriétés des Transformées de Laplace Théorème de convolution La convolution de deux fonctions f(t) et g(t), est la fonction h(t) définie par que l’on note h(t) = f * g. Cette opération est commutative, c’est-à-dire que On a : Rappel : la transformée de Laplace d’un produit n’est pas le produit des transformées de Laplace !
 dans le monde réel")
Transformées inverses de Laplace Rappel : A une fonction f(t) dans le monde réel correspond une fonction F(p) dans le monde symbolique. Cette fonction est appelée : image de f(t). Inversement f(t) est appelée : originale de F(p). Comment retrouver f(t) à partir de F(p) ? 1) Par lecture des tables de transformées 2) et/ou par exploitation des propriétés 3) et/ou par décomposition en éléments simples (dans le cas de F(p) en fractions rationnelles) 4) par la méthode des résidus (vue plus tard)

TRANSFORMEES DE LAPLACE Définition, propriétés Application à l’électronique

Application 1 : Circuit LR attaqué par un échelon de tension
 = L{e(t)} S(p) = L{s(t)} I(p) = L{i(t)} Ecrire les")
On pose : E(p) = L{e(t)} S(p) = L{s(t)} I(p) = L{i(t)} Ecrire les équations qui régissent le circuit, sous forme temporelle, et sous forme de Laplace. e(t) = u. L(t) + u. R(t) E(p) = UL(p) + UR(p) u. L(t) = L di/dt u. R = R i(t) UL(p) = L p I(p) UR(p) = R I(p) E(p) = (R + L p) I(p) On applique en e(t), un échelon de tension, d’amplitude E o. Condition initiale nulle. Déterminer l’expression de I(p). En déduire i(t). E(p) = Eo/p i(t) = ?
 = ? Il nous faut trouver l’original de I(p) 1) Par lecture des")
i(t) = ? Il nous faut trouver l’original de I(p) 1) Par lecture des tables de transformées On connaît : l’original de 1/p : u(t) l’original de 1/(p+a) : u(t) exp (-at) Mais on n’a pas l’original de 1/[p(p+a)] ou du moins on suppose que l’on ne l’a pas… 2) et/ou par exploitation des propriétés 3) et/ou par décomposition en éléments simples (dans le cas de F(p) en fractions rationnelles) Eo A = R -R/L B = On prend l’original i(t) = Eo/R [ 1 -exp (–t/ ) ] u(t) s(t) = R i(t) S(p) = R I(p) = L/R s(t) = Eo [ 1 -exp (–t/ ) ] u(t)
 = u. L(t) + u. R(t) u. L(t) = L di/dt u. R")
e(t) = u. L(t) + u. R(t) u. L(t) = L di/dt u. R = R i(t) E(p) = Eo p Récapitulation : Equations temporelles, E(p) = (R + L p) I(p) Transformation en Laplace Résolution sous Laplace s(t) Retour en temporel Eo À t -> infini, courant continu, di/dt = 0 et s = e = Eo Tension s(t) = R i(t) : t s(t) = Eo [ 1 -exp (–t/ ) ] u(t)
 = L di/dt u. R = R i(t) Rappel : Résolution en")
u. L(t) = L di/dt u. R = R i(t) Rappel : Résolution en temporel L i’ + R i = e(t) 1 - On intègre d’abord l’ESSM : L i’ + R i = 0 i(t) = Io exp [-t/ ] avec = L/R 2 - On recherche une solution particulière : On recherche i(t) qui satisfasse : L i’ + R i = constante = E o i(t) de la forme = constant répond à cette équation i(t) = Eo/R 3 - La solution complète est : la solution de l’ESSM + solution particulière i(t) = Io exp [-t/ ] + Eo/R 4 - La constante d’intégration Io est alors calculable par la condition initiale À t = 0, i(t) = 0, soit : 0 = Io exp [-t/ ] + Eo/R Il vient : i(t) = Eo/R (1 -exp [-t/ ]) => Io =- Eo/R Par s(t) = R i(t) : s(t) = Eo (1 -exp [-t/ ]) pour t > 0

Application 2 : Circuit LR attaqué par une rampe de tension On applique en e(t), une rampe de tension, d’expression kt. Condition initiale nulle. Déterminer l’expression de I(p). En déduire i(t).

1 p 2 Rappel : transformée de Laplace de la rampe unitaire : L’entrée e(t), qui est une rampe kt, a comme transformée de Laplace : E(p) = k 2 p Les équations de maille sont inchangées, et on conserve : Il nous faut trouver l’original de cette expression pour avoir i(t) Décomposition en éléments simples = B C/L A p 2 + p+R/L = B C A p 2 + p + R+Lp Supposons A, B, C calculés Original terme à terme i(t) = [At + B + C/L exp (-t/ )] u(t) ou « pour t > 0 »

Décomposition en éléments simples = B C A p 2 + p + R+Lp Parmi les différentes méthodes, l’identification après réduction au même dénominateur A(R+Lp) + Bp (R+Lp) + C p 2 (R + Lp) D’où = p 2(BL+C) + p (AL + BR) + AR = k =0 =0 = k C = - B L B = - A L / R A = k/R B = - k L / R 2 C = k L 2/R 2

A = k/R B = - k L / R 2 C = k L 2/R 2 i(t) = [At + B + C/L exp (-t/ )] u(t) i(t) = [ (k/R) t - k L / R 2 + k L/R 2 exp (-t/ )] u(t) i(t) = (k/R) {t - L / R + L/R exp (-t/ ) } u(t) i(t) = k/R { t - [1 - exp (-t/ )] } u(t) D’où le tracé = L/R
![i(t) = k/R { t - [1 - exp (-t/ )] } u(t) R](http://slidetodoc.com/presentation_image/0f088de8ac19abf883f1173db5e2f016/image-35.jpg "i(t) = k/R { t - [1 - exp (-t/ )] } u(t) R")
i(t) = k/R { t - [1 - exp (-t/ )] } u(t) R i(t) = k { t - [1 - exp (-t/ )] } u(t) R i(t) droites parallèles : pente k e(t) À t tendant vers 0 : i(t) = 0 À t tendant vers l’infini : t Tension R i(t) : k { t - [ 1 - exp (-t/ ) ] } pour t > 0 k {t - } u(t) i(t) se comporte comme : R Pour t grand, la tension Ri(t) se comporte comme : k {t - } u(t)
 = u. L(t) + u. R(t) u. L(t) = L di/dt u. R")
e(t) = u. L(t) + u. R(t) u. L(t) = L di/dt u. R = R i(t) Récapitulation : Equations temporelles, E(p) = k 2 p E(p) = (R + L p) I(p) Transformation en Laplace Résolution sous Laplace Retour en temporel Tension s(t) = R i(t) : k { t - [ 1 - exp (-t/ ) ] } pour t > 0

Application 3 : Circuit RC attaqué par une impulsion de courant Io de durée T Forme du courant i(t) montage
 montage Utiliser le formalisme de Laplace pour exprimer I(p), transformée")
Forme du courant i(t) montage Utiliser le formalisme de Laplace pour exprimer I(p), transformée de Laplace de i(t) = I(p) = Io p - Io p exp (-Tp) Transformées de Laplace terme à terme Io Io u(t) p Io u(t) retardé de T soit Io u(t-T) Io exp (-Tp) p Théorème du retard
 peut aussi se déterminer par la")
Remarque intéressante : Pour cet exemple simple, I(p) peut aussi se déterminer par la définition :
 = p - Io p exp (-Tp) Il nous")
Nous avons calculé Io I(p) = p - Io p exp (-Tp) Il nous faut maintenant uc(t) Par loi d’Ohm aux bornes d’un condensateur Uc(p) = Io Cp 2 - Io Cp 2 1 I(p) Cp exp (-Tp) Sans C. I.
 Uc(p) = Io Cp 2 - Io")
On finit en recherchant l’original de UC(p) Uc(p) = Io Cp 2 - Io exp (-Tp) Cp 2 D’où terme à terme : uc(t) = Ce qui signifie : Io C t u(t) - t pour t > 0, nul ailleurs Io (t-T) u(t-T) C Io C (t-T) Pour t > T, nul ailleurs
 = Io C t u(t) - Io C (t-T) u(t-T) Construction de uc(t)")
uc(t) = Io C t u(t) - Io C (t-T) u(t-T) Construction de uc(t) : Io t C pour t > 0, nul ailleurs Io C (t-T) pour t > T, nul ailleurs Io C T Charge à courant constant Courant nul, le condensateur reste chargé
 = Io u(t) - Io u(t-T) Equations temporelles, Transformation en")
Récapitulation : i(t) = Io u(t) - Io u(t-T) Equations temporelles, Transformation en Laplace Résolution sous Laplace I(p) = Retour en temporel Io p Uc(p) = uc(t) = Io C t u(t) - Io Cp 2 Io C Io p - exp (-Tp) Io exp (-Tp) Cp 2 (t-T) u(t-T)
 D(p) degré de D(p) > degré de N(p) Cas")
Décomposition en éléments simples N(p) D(p) degré de D(p) > degré de N(p) Cas 1 : toutes les racines de D(p) sont réelles et différentes ( « pôles simples » ) D(p) peut s’écrire sous une forme comme (p+a) (p+b) (p+c)… a, b, c, réels N(p) = A + B C Alors : + [il y a autant de termes que le degré de D(p)] p+a p+b p+c D(p) Cas 2 : des racines de D(p) sont réelles et égales ( « pôles multiples, de mutiplicité n » ) D(p) peut s’écrire sous une forme comme (p+a)n (p+b) (p+c)… a, b, c, réels A 3 An Alors : N(p) = A 1 + A 2 + C +… + + B + p+a (p+a)2 p+b p+c D(p) (p+a)3 (p+a)n Cas 3 : des racines de D(p) sont complexes (pôles « complexes » ) D(p) peut s’écrire sous une forme comme (p 2+ap+b) (p+c)… Alors : N(p) D(p) Ap+B C = + p+c p 2+ap+b Tel que le discriminant Δ est < 0 Cas 4 : des racines de D(p) sont complexes et multiples D(p) peut s’écrire sous une forme comme (p 2+ap+b)n (p+c)… A 1 p+B 1 A 2 p+B 2 Anp+Bn C N(p) Alors : + +. . + + p+c D(p) = p 2+ap+b (p 2+ap+b)2 (p 2+ap+b)n
 Interrupteurs dans cette position, donner courants, tensions")
Application 4 : Circuit d’ordre 2 1) Interrupteurs dans cette position, donner courants, tensions d’équilibre (régime permanent) i. L 1 = i. L 2 = 0 (branches ouvertes) u. C = 1 V Cela permet de placer des conditions initiales pour la question suivante ; +) 2) On commute les 2 interrupteurs simultanément. Calculer i(t) circulant dans L 1.
 i 2 i-i")
Fléchons courants, tensions : u. R 1 u. L 2 i(t) i 2 i-i 2 ve u. R 2 u. C Etablissons les lois des mailles, lois des noeuds ve = u. R 1 + u. L 1 + uc u. L 1 = L 1 di/dt u. R 1 = R 1 i ve = R 1 i + L 1 di/dt + u. C (1) uc = 1/C ∫ (i-i 2) dt du. C/dt = (1/C) (i-i 2) (2) u. C = u. R 2 + u. L 2 u. R 2 = R 2 i 2 u. L 2 = L 2 di 2/dt u. C = R 2 i 2 + L 2 di 2/dt (3)
} = p F(p) – f(0+) (1) ve")
Transformées de Laplace Rappel : L {f’(t)} = p F(p) – f(0+) (1) ve = R 1 i + L 1 di/dt + u. C Ve(p) = R 1 I(p) + L 1 [ p I(p) – i(0) ] + UC(p) (2) du. C/dt = (1/C) (i-i 2) p UC(p) – u. C(0) = (1/C) [I(p) – I 2(p)] (3) u. C = R 2 i 2 + L 2 di 2/dt UC(p) = R 2 I 2(p) + L 2 [ p I 2(p) – i 2(0) ] Avec, d’après la question précédente : i(0) = 0 A , i 2(0) = 0 A , u. C(0) = 1 V Éliminons I 2 : Par (3) : I 2 = UC(p) R 2+L 2 p UC(p) Mis dans (2) : p UC(p) – 1 = (1/C) [ I(p) - ] R 2+L 2 p On trouve alors une expression de UC(p) : ( I(p)/C + 1) ( R 2+L 2 p ) C UC(p) = p 2 L 2 C + R 2 C p + 1 Que l’on place dans (1), pour aboutir à : I(p) = Ve(p) Transformée de Laplace de i(L 1) [ p 2 L 2 C + R 2 C p + 1 ] - ( R 2+L 2 p ) C ( R 1 + L 1 p ) [p 2 L 2 C + R 2 C p + 1] + R 2 + L 2 p Conséquence de la C. I.
 = (1/p) Ve(p) = 1/p (l’interrupteur crée un échelon de 1")
Application numérique I(p) = (1/p) Ve(p) = 1/p (l’interrupteur crée un échelon de 1 V) [ p 2/2 + 2 p + 1 ] – (4 + p) (1/2) (4+p) [ p 2/2 + 2 p + 1 ] + 4 + p 1 Soit, après simplification : I(p) = p [ p 3/2 + 4 p 2 + 10 p + 8 ] On remarque : [ p 3/2 + 4 p 2 + 10 p + 8 ] = 1 2 d’où I(p) = Soit, après identification : a = 2, b = 2, c = 4 (p+a) (p+b) (p+c) 2 p (p+2)2 (p+4) A I(p) = p qui se décompose en éléments simples : Avec : A = 1/8, B = 0 , C = -1/2 , D = -1/8 D’où, l’original, terme à terme : 1 I(p) = + 8 p - B + C (p+2)2 1 1 - + D (p+4) 2(p+2)2 8(p+4) i(t) pour t > 0 i(t) = 1 – 1 t exp (-2 t) – 1 exp (-4 t) 8 2 8
 = 1 – 1 t exp (-2 t) – 1 exp (-4 t)")
i(t) = 1 – 1 t exp (-2 t) – 1 exp (-4 t) 8 2 8 pour t > 0 Exploitons Matlab pour tracer cette équation Script : t = (0 : 1 e-3 : 5) ; i = 0. 125 – 0. 5*t. *exp(-2*t)- 0. 125*exp(-4*t); figure(1) ; plot(t, i) ; title('courant') xlabel('temps') Au voisinage de 0… exp(-2 t) ≈ 1 - 2 t + 2 t 2 +… d’où t exp(-2 t) ≈ t - 2 t 2 + 2 t 3 +… exp(-4 t) ≈ 1 - 4 t + 8 t 2 - (64/6) t 3 +. . . i(t) ≈ t 3/3 Rem : pour t → , i(t) → 0, 125 A

Exploitons Pspice pour vérifier le comportement de ce circuit evolution du courant dans circuit R 1 L 1 CL 2 R 2 * fichier ordre 2. cir Ve 1 0 DC=1 i(t) R 1 1 2 4 L 1 2 3 1 IC=0 C 3 0 0. 5 IC=1 L 2 3 4 1 IC=0 R 2 4 0 4 . tran 1 m 5 0 1 m UIC. probe. end Valeur finale : 0, 125 A En DC, la source 1 V est connectée à 4 + 4 = 8 , d’où i = 1/8 = 0, 125 A Valeur du courant à t = 0 : 0 A On retrouve la condition initiale
 = lim p I(p) t→ 0 p→")
Théorème de la valeur initiale lim i(t) = lim p I(p) t→ 0 p→ Soit lim p p→ 1 1 1 ( ) 8 p = 0 2(p+2)2 8(p+4) Théorème de la valeur finale Si elle existe, Soit lim p p→ 0 lim i(t) = lim p I(p) t→ p→ 0 1 1 1 ( ) 8 p = 1/8 = 0, 125 2(p+2)2 8(p+4) On a donc i(0) et i( ) avant d’avoir l’expression de i(t)
 (2) (3) (4)")
Pour info : exploitons Pspice pour visualiser les autres grandeurs (1) (2) (3) (4) u. C(0) = 1 V V(2) = V(3) = V(4) = 0, 5 V Condensateur chargé i. C < 0 signifie courant sortant (décharge)

« CIRCUIT » Transformées de Laplace Analyse harmonique Quadripôles

ANALYSE HARMONIQUE Principe, notion de transmittance Application à l’électronique

ANALYSE HARMONIQUE Principe, notion de transmittance Application à l’électronique
 = R I(p) E(p) = (R + L p) I(p)")
notion de transmittance S(p) = R I(p) E(p) = (R + L p) I(p) La « transmittance en p » est la fonction de transfert : grandeur de sortie en p grandeur d’entrée en p Utilisée dans le formalisme des schémas blocs. Rem : Transmittance ou fonction de transfert.

de la transmittance en « p » à la réponse harmonique Rappel : Pour les systèmes linéaires, l'analyse fréquentielle permet de connaître la réponse du système à une excitation sinusoïdale, à différentes fréquences. L’étude de la réponse harmonique d'un système consiste simplement à étudier le nombre complexe T(jω) qu'on appelle transmittance harmonique (ou transmittance complexe). Le nombre complexe T(jω) s'obtient simplement en remplaçant p par jω dans l'expression de la fonction de transfert T(p).
 en fonction de la")
Il existe plusieurs représentations d'un nombre complexe (module et phase) en fonction de la fréquence (ou pulsation) Bode Nyquist Black Bode Les lieux de Bode sont constitués : - d'une courbe de gain (en d. B) rappel : Gain = 20 log I A I - et d'une courbe de phase φ (en °, ou en rad). On utilise une échelle semi logarithmique : Pulsation (ou fréquence) sur une échelle log G sur une échelle linéaire en d. B (c’est-à-dire A sur une échelle log…).
 en fonction de la")
Il existe plusieurs représentations d'un nombre complexe (module et phase) en fonction de la fréquence (ou pulsation) : Bode Nyquist Black Nyquist C'est la représentation du nombre complexe T(jω) dans le plan complexe, en coordonnées polaires, en faisant varier le paramètre ω de 0 à l'infini. Le lieu de Nyquist est gradué en valeurs de ω (ou f).
 en fonction de la")
Il existe plusieurs représentations d'un nombre complexe (module et phase) en fonction de la fréquence (ou pulsation) : Bode Nyquist Black ω varie de 0 à +∞ en abscisse, la phase (en degré, sur une échelle linéaire) et en ordonnée, le gain G (=20 log |A|) Le lieu de Black est gradué en valeurs de ω (ou f).

Réponses harmoniques du dérivateur Fonction jω Nyquist Bode Module : ω Phase : artg = π/2 20 log module 20 log ω http: //www. iutenligne. net/ressources/automatique/verbeken/Cours. AU_MV/

Réponses harmoniques de l’intégrateur Fonction 1/jω Nyquist Bode Module : 1/ω Phase : artg - = -π/2 20 log module 20 log 1/ω = - 20 log ω http: //www. iutenligne. net/ressources/automatique/verbeken/Cours. AU_MV/
")
Intérêt des Tracés de Bode : Cas d’une fonction produit 20 log N 1(jω) N 2(jω) Les tracés de 20 log {module} et de la phase se font par étapes élémentaires T(jω) = N 1(jω) N 2(jω) = 20 log N 1(jω) + 20 log N 2(jω) Cas d’une fonction rapport T(jω) = N(jω) / D(jω) 20 log N(jω) D(jω) = 20 log N(jω) Cas général T(jω) = Par log (A B) = log A + log B, on a : = 2 tracés permettent d’avoir le produit Par log (A / B) = log A - log B, on a : = 2 tracés permettent d’avoir le rapport - 20 log D(jω) ω ω (1 + j ) ω1 ω2 Par log (A B / C D) = log A + log B – log C – log D ω ω (1 + j ) ω3 ω4 etc Par arg (A / B) = arg A - arg B, on a : De même, pour la phase : N(jω) φ { } D(jω) ou N(jω) arg{ } D(jω) = arg { } N(jω) - arg { } D(jω) etc = 2 tracés
 rapport")
Exemple de base : transmittance vue précédemment Transmittance que l’on pose à T(p) rapport des tensions D’où T(jω) Remarque : c’est également transmittance d’un circuit RC 1/Cp 1 = = R + 1/Cp 1 + RCp la remplaçons p par jω :
 = D(jω) log N(jω) - log D(jω) 20 log N(jω) = 20")
log N(jω) = D(jω) log N(jω) - log D(jω) 20 log N(jω) = 20 log N(jω) - 20 log D(jω) Dj(ω) tracé de 20 log N(jω) permettent d’avoir le tracé de 20 log D(jω) N(jω) φ { } D(jω) ou N(jω) arg{ } D(jω) tracé de arg{ } N(jω) D(jω) tracé de arg{ } = Rappel : Le tracé de Bode se fait par étapes 20 log N(jω) Dj(ω) arg { } N(jω) - arg { } D(jω) permettent d’avoir le tracé de N(jω) φ{ } D(jω)
 = √ 2 D(jω)")
20 log = 20 log 1 - 20 log D(jω) = √ 2 D(jω) ≈ 1 20 log ω infini ω = 1/ ω 0 ≈ 0 d. B 20 log D(jω) ≈ ω infini 20 log ≈ - infini = - 3 d. B φ{ } = arg { } arg{ } D(jω) = - arg{ } 1 ω 0 arg D(jω) ≈ artg 0 = 0 arg T(jω) ≈ - artg 0 ≈ 0 ω infini ω = 1/ arg D(jω) ≈ artg { } ≈ ω /2 arg T(jω) ≈ - artg 1 = - /4 = - 45° arg T(jω) ≈ - artg infini ≈ - /2

20 log = - 20 log ω infini ω = 1/ ω 0 ≈ 0 d. B - infini = - 3 d. B φ{ } ω 0 - arg{ } ω = 1/ 0 ω infini = - 45° - /2

Bode f → infini : Asymptote : -20 d. B/décade f → 0 : Asymptote horizontale 3 d. B f, ω → 0 I I → 1 G → 0 Intégrateur en hautes fréquences f, ω → I I → 0 G → - /2 -45°

Nyquist Comportement quand f 0 f infini 1 f, ω → → - /2 I I → 0 Intégrateur en hautes fréquences f, ω → 0 I I → 1 10 Hz (exemple) 20 Hz (exemple) Incomplet… 50 Hz (exemple) Repère orthonormé : lieu en demi cercle
 x = Dans le plan complexe, l’affixe de")
Pourquoi est-ce un cercle ? (1) x = Dans le plan complexe, l’affixe de T(jω) est : Combinons (1) et (2) Soit (1) : y 2 = x 2 (ω )2 x + x(ω )2 = 1 Soit, (12): y = - ω x x(ω )2 = 1 - x y 2 = x 2 (1/x -1 ) = x - x 2 (2) (12) (ω )2 = 1/x - 1 = - [x 2 - x + ¼ - ¼] = - [(x-1/2)2 - ¼] D’où : y 2 + (x-1/2)2 = 1/4 0 Équation d’un cercle (y-y 0)2 + (x-x 0)2 = R 2 Rayon 1/2 Centre y = 0 et x = 1/2 1

Intérêt des Tracés de Bode : Les tracés de 20 log {module} et de la phase se font par étapes élémentaires Autre exemple vs(jf) ve(jf) = jf/f. N (1+ jf/f 1) (1+jf/f 2) 100 1 k f. N 1 k. Hz ; f 1 1 k. Hz ; f 2 100 k. Hz 10 k 100 k 1 M f 0 d. B Tracés asymptotiques -20 d. B/dec 20 log +20 d. B/dec + /2 0 - /2 vs(jf) ve(jf)

COMMENT FAIRE SI ON N’A PAS DE PAPIER LOGARITHMIQUE ? À propos de l’échelle log… 3 Arrondir à 0, 3 représente une Or 0, 3 = log 2 0, 3 erreur de … 0, 34 % environ 10 En toute rigueur log 2 = 0, 30102999… ce qui est acceptable pour un tracé…. Prenons un axe, et marquons 10 intervalles régulièrement espacés + 1 octave Plaçons 10 1 2 1, 25 4 2, 5 - 1 octave 8 10 5 - 1 octave + 1 décade Multiplier par 10 ajouter une décade Multiplier par 2 ajouter une octave 2 sur une échelle log est au 3/10 Diviser par 2 retirer une octave

On ajoute 2 intervalles + 1 octave Continuons à graduer une échelle log : 1 2 1, 25 1, 6 4 2, 5 3, 2 8 5 10 16 6, 4 - 1 décade Ces valeurs sont donc placées sur une échelle log + 1 octave 12, 8 ? ? Remarque : Pourquoi n’y a-t-il pas un rapport 10 ? ? ? On a fait : 2; 4; 8; 16 : 4 fois l’erreur, Retour à 1, 6 : pas d’erreur puis 3, 2; 6, 4; 12, 8 : 3 fois l’erreur. Soit au total un cumul de 7 erreurs dans le même sens À chaque octave, on a fait une erreur de 0, 34 % (1, 0034)7 = 1, 024 1, 25 x 10 x 1, 024 = 12, 8

Échelle log Autre « truc » à savoir : a b Milieu du segment [a b] sur une échelle log Milieu géométrique 1 10 ≈3, 16 etc

10 20 40 100 80 200 400 1 k 800 2 k 4 k 8 k 10 k log 100 10 20 40 80 Expérimentalement, pour tracer une courbe, quelques points judicieusement placés apportent toute l’information utile. Judicieusement placés : par exemple : ou : 1 ; 2 ; 4 ; 8 ; 10 1 ; 2, 5 ; 10 un mix des 2 (1 ; 2 ; 5 ; 10 ) etc

Dernier « truc » à savoir, sur l’artg : - 1 décade + 1 décade Asymptote oblique Pente 45 ° par décade ω0 ω0 10 ω0 log 10 L’asymptote oblique est proche de la fonction artg : L’écart entre ces 2 courbes est inférieur à 6° Cela forme donc un tracé rapide et représentatif, de la phase d’un système du premier ordre
 présentés ont pour fonction de transfert :")
Rappel : ces tracés (Bode, Nyquist, Black) présentés ont pour fonction de transfert : Obtenues, par exemple, avec les montages suivants : i = 0 T 1(j ) i = 0 T 2(j ) Sont avec des montages sans courant débité Conséquence : T(j ) = s(j )/e(j ) ≠ T 1(j ) T 2(j )
 Cas du passe bas")
Lien entre réponse harmonique et comportement temporel (réponse à l’échelon) Cas du passe bas Réponse indicielle rapide = bande passante élevée faible 1/ élevé 1/2 BP-3 d. B t → f → 0 Comportement statique

ANALYSE HARMONIQUE Système du deuxième ordre

Expressions générales : p→jω Laplace p 2 ω0 2 + 2 z p ω0 + 1 1 + 2 z j Passe haut ω0 2 + 2 z ω ω0 - ω2 ω0 2 1 1 p 2 Etude harmonique p ω0 + 1 ω0 : Pulsation propre 1 + 2 z j Passe bas ω ω0 - z : Coefficient d’amortissement ω2 ω0 2

1 + 2 z j ω ω0 Module 1 - 2 ω2 ω0 2 + 2 z ω0 2 Phase 2 ω 2 z ω ω0 = artg{ } ω0 Variable réduite - ω2 1 - ω2 ω0 2 ω ω0 Ces fonctions sont paramétrées en z 3 cas : z > 1 ; z = 1 ; z < 1

p 2 Si z > 1, le trinôme : ω0 2 + 2 z 1 + 2 z j Tel que : ω0 2 = ω ω0 1 ω0 = 1 1 2 1 1 1 2 p + 1 ω0 - ω2 ω0 2 peut s’écrire : (1 + 1 p) (1 + 2 p) peut s’écrire : (1 + jω/ω1) (1 + jω/ω2) 1 f 02 = f 1 f 2 1 = ω1 = 2 1 1 = ω2 = 2 2 f 1 f 2 f 0 f 2 ω1 ω0 ω2 z > 1 f 0 = f f 1 2 = f 1 = = f 2 = f ω Échelle log

z > 1 z = 1 z < 1 ω0= 1 z = 50 Passe bas >> T=tf([1], [1, 100, 1]); >> bode (T) ω1 ω2 ω = → 0 Nyquist Bode p→jω ω0= 1 z = 5 >> T=tf([1], [1, 10, 1]); >> bode (T) 0 d. B ω = → - ≈ 0, 01 z > 1 : équivalent à : 1 (1 + jω/ω1) ≈ 100 1 (1 + jω/ω2) ≈ 0, 1 ≈ 10 Il faut monter haut en fréquence pour vérifier ordre 2

z > 1 z = 1 z < 1 Bode ω0= 1 z = 50 Nyquist ω0= 1 z = 5 ω < 0 ω = →- ω = →+ → - /2 ? ? ? ω = → 0 ω > 0 Même lieu… Mais coordonnées des fréquences différentes Il faut monter haut en fréquence pour vérifier ordre 2 zoom - ω = → >> T=tf([1], [1, 100, 1]); >> nyquist (T) >> T=tf([1], [1, 10, 1]); >> nyquist (T)

z > 1 z = 1 z < 1 Bode - 6 d. B Cas particulier Pôle double 1 1 + 2 z j ω ω0 ω0= 1 Nyquist - ω2 ω0 2 z = 1 >> T=tf([1], [1, 2, 1]); >> bode (T) z = 1 : équivalent à 1 2 (1 + jω/ω0)

z > 1 z = 1 z < 1 Nyquist Bode 1 1 + 2 z j ω ω0 - ω2 ω0 2 ω = → 0 ω > 0 >> T=tf([1], [1, 2, 1]); >> nyquist (T) Ce passe-bas est clairement un ordre 2 : 2 quadrants traversés

z < 1 p 2 ω0 2 + 2 z 1 + 2 z j ω ω0 Le module 1 - p + 1 ω0 - ω2 ω0 2 2 + 2 z 2 ω ω0 A une dérivée qui s’annule pour une pulsation particulière : ωR = ω0 1 - 2 z 2 Le module passe par un maximum à ωR appelée pulsation de résonance la résonance n’existe que si z < Si z << 1, ωR ≈ ω0 1 2

z > 1 z = 1 z < 1 Bode Nyquist 1 ω2 ω 1 + 2 z j - ω0 ω0 2 ω0= 1 z = 0, 1 >> T=tf([1], [1, 0. 2, 1]); >> bode (T) à ω0 , = - 90° I I = 1 1 2 z 1 - z 2 2 z ωR = ω0 1 - 2 z 2 = 1 – 0, 02 = 0, 98 ≈ 1 = ω 0

z > 1 z = 1 z < 1 Bode Nyquist 1 1 + 2 z j ω ω0 ω0= 1 - ω2 ω0 2 z = 0, 1 >> T=tf([1], [1, 0. 2, 1]); >> nyquist (T) ω = → 0 ω > 0 -45° -135° Résonance : Augmentation du module Grande variation angulaire sur une faible variation de fréquence
 Cas du passe bas")
Lien entre réponse harmonique et comportement temporel (réponse à l’échelon) Cas du passe bas Équivalent à 2 premiers ordres résonance Très marquée Peu marquée 0, 707 0 confondus Très séparés z 1 z 0 Faiblement amortie >> T=tf([1], [1, 0. 2, 1]); >> step (T) z = 0, 1 Réponse oscillatoire 1 >> T=tf([1], [1, 2, 1]); >> step (T) z = 1 Il faut zoomer au voisinage de t = 0 pour vérifier ordre 2 : Tangente horizontale et point d’inflexion >>T=tf([1], [1, 10, 1]); >> step (T) z = 5

ANALYSE HARMONIQUE Systèmes d’ordre supérieur à 2 Le tracé de Bode se fait par étapes successives, en partant de tracés élémentaires connus j ω ω1 ω (1 + j ) ω1 ω2 1 j ω ω1 1 1 ω (1 + j ) ω1 ω2 2 1 + 2 z j ω - ω ω0 ω 02

Ex. 1 1 1 2 1 + 2 z j ω - ω ω0 ω 02 >> TA=tf([1], [1, 0. 2, 1]); >> bode (TA) Passe bas Ordre 2, avec résonance - 40 d. B/déc ω0= 1 z = 0, 1 ω (1 + j ) ω1 ω1 = 100 >> T=TA*T 3; >> bode (T) - 40 d. B/déc 1 rad/s >> T 3=tf([0, 1], [1/100, 1]); >> bode (T 3) - 60 d. B/déc Passe bas, Ordre 1 - 20 d. B/déc Sur la courbe de phase, les 2 cassures (séparées par 2 décades) ne s’influencent pratiquement pas Asymptote oblique 100 rad/s
![Ex. 2 >> T=tf([1, 0. 2, 1], [0, 1]); >> bode (T) 2 1](http://slidetodoc.com/presentation_image/0f088de8ac19abf883f1173db5e2f016/image-93.jpg "Ex. 2 >> T=tf([1, 0. 2, 1], [0, 1]); >> bode (T) 2 1")
Ex. 2 >> T=tf([1, 0. 2, 1], [0, 1]); >> bode (T) 2 1 + 2 z j ω - ω ω0 ω 02 1 ω (1 + j ) ω1 Passe haut Ordre 2, avec résonance ω0= 1 z = 0, 1 ω1 = 100 + 40 d. B/déc >> Tt =T*T 3; >> bode (Tt) + 20 d. B/déc 1 rad/s + 40 d. B/déc >> T 3=tf([0, 1], [1/100, 1]); >> bode (T 3) Passe bas, Ordre 1 - 20 d. B/déc Dans ce cas (z=0, 1), les 2 cassures (séparées par 2 décades) ne s’influencent pratiquement pas 100 rad/s 1 100
![Ex. 3 >> T 2=tf([1, 10, 1], [0, 1]); >> bode (T 2) 2](http://slidetodoc.com/presentation_image/0f088de8ac19abf883f1173db5e2f016/image-94.jpg "Ex. 3 >> T 2=tf([1, 10, 1], [0, 1]); >> bode (T 2) 2")
Ex. 3 >> T 2=tf([1, 10, 1], [0, 1]); >> bode (T 2) 2 1 + 2 z j ω - ω ω0 ω 02 ≈ 0, 1 ≈ 10 ω0= 1 + 40 d. B/déc z = 5 1 ω (1 + j ) ω1 ω1 = 100 >> T =T 2*T 1; >> bode (T) 120 d. B 80 d. B 0, 1 10 40 d. B >> T 1=tf([0, 1], [1/100, 1]); >> bode (T 1) Passe bas, Ordre 1 0 d. B 3 cassures : - 20 d. B/déc 0, 1 et 10 100 La courbe réelle de phase « n’a pas le temps » d’atteindre les asymptotes

ANALYSE HARMONIQUE Principe, notion de transmittance Application à l’électronique

ANALYSE HARMONIQUE Principe , notion de transmittance Application à l’électronique
 montages passifs, (étudiés")
Application n° 1 : montages passifs, (étudiés en TD n° 5) montages passifs, (étudiés en TD n° 6)
 vs(jω)")
Application n° 2 : Ordre 2, passif Réponse harmonique de : ve(jω) vs(jω)
 H(jω) = ve(jω) vs(jω) ZTH = vs(jω) Par pont diviseur de tension :")
vs(jω) H(jω) = ve(jω) vs(jω) ZTH = vs(jω) Par pont diviseur de tension : ve(jω) vs(jω) = ETH j R 1 Lω R 1 + j Lω ETH = ve(jω) R 1 + j Lω R 2 + (1/j. Cω) + ZTH R 1 R 2 Soit : vs(jω) = ve(jω) R 1 + j Lω R 2 + (1/j. Cω) + ZTH vs(jω) Ordre 2, passif ve(jω) = jω/ωn 1 + 2 z j ω ω0 - ω2 ω0 2
 ve(jω) jω R 2 C = 1 + jω [R 2")
Soit : vs(jω) ve(jω) jω R 2 C = 1 + jω [R 2 C + (L/R 1)] – LCω2 (1+R 2/R 1) = jω/ωn 1 + 2 z j ω ω0 Par identification : - ω2 ω0 = ωn = 1 R 2 C 1 LC (1+R 2/R 1) A. N. : R 1 = 1, 8 kΩ ; R 2 = 1 kΩ ; L = 1 m. H ; C = 160 n. F. ωn = 6250 rad/s 2 z ω0 fn 1 k. Hz = R 2 C + (L/R 1) ω0 = 63, 38 krad/s f 0 10 k. Hz D’où z = 5, 1 Rem : z > 1 (2 racines réelles) signifie que le polynôme d’ordre 2 s’écrit : (1+ j / 1) (1+j / 2) ou (1+ jf/f 1) (1+jf/f 2) A. N. : f 1 1 k. Hz ; f 2 100 k. Hz avec : f = 1 f 2 =

f. N 1 k. Hz ; f 1 1 k. Hz ; f 2 100 k. Hz vs(jω) ve(jω) = jf/f. N (1+ jf/f 1) (1+jf/f 2)
 ve(jω) = jf/f. N (1+ jf/f 1) (1+jf/f 2) 100")
Étude déjà vue… vs(jω) ve(jω) = jf/f. N (1+ jf/f 1) (1+jf/f 2) 100 1 k f. N 1 k. Hz ; f 1 1 k. Hz ; f 2 100 k. Hz 10 k 100 k 1 M 0 d. B Tracés asymptotiques -20 d. B/dec 20 log +20 d. B/dec + /2 0 - /2 vs(jω) ve(jω)
 ve(jω) = jf/f. N (1+ jf/f 1) (1+jf/f 2) f. N 1 k.")
vs(jω) ve(jω) = jf/f. N (1+ jf/f 1) (1+jf/f 2) f. N 1 k. Hz ; f 1 1 k. Hz ; f 2 100 k. Hz
 ve(jω) = jf/f. N (1+ jf/f 1) (1+jf/f 2) >> T 1=tf([1/(2*pi*1 e")
vs(jω) ve(jω) = jf/f. N (1+ jf/f 1) (1+jf/f 2) >> T 1=tf([1/(2*pi*1 e 3), 0], [0, 1]); >> bode (T 1, {2*pi*1 e 2, 2*pi*1 e 6}) f. N 1 k. Hz ; f 1 1 k. Hz ; f 2 100 k. Hz >> T 2=tf([0, 1], [1/(2*pi*1 e 3), 1]); >> bode (T 2, {2*pi*1 e 2, 2*pi*1 e 6}) >> T 3=tf([0, 1], [1/(2*pi*100 e 3), 1]); >> bode (T 3, {2*pi*1 e 2, 2*pi*1 e 6}) >> T=T 1*T 2*T 3; >> bode (T, {2*pi*1 e 2, 2*pi*1 e 6}) 100 Hz 100 MHz
 Comportement e en BF vs(jω) Comportement en HF f = 10")
Interprétation v (jω) Comportement e en BF vs(jω) Comportement en HF f = 10 k. Hz Lω << R 1, R 2, 1/Cω << R 1, R 2, Lω I I ≈1 G ≈ 0 d. B = 0 à ur ate Dé riv 1 R 2 C ≈ 6, 28 krad/s ∞ 1 ≈ 1 k. Hz 2 R 2 C f → à 100 Hz ur 1/Cp + R 2 1 + R 2 Cp te R 2 Cp I I = 0, 707 G = - 3 d. B = - /4 ra = I I = 0, 707 G = - 3 d. B = /4 f = 100 k. Hz ég f→ 0 t In R 2 f = 1 k. Hz REQ = R 1 // R 2 100 MHz REQ 1 = REQ + Lp 1 + (L/REQ)p 1 ≈ 100 k. Hz 2 REQ/L 1 REQ/L ≈ 628 krad/s
; Comportement en BF I I = 0, 707 = /4")
Nyquist >> nyquist (T); Comportement en BF I I = 0, 707 = /4 f = 1 k. Hz f, ω → 0 I I → 0 → /2 En milieu de bande f, ω → 0 f = 10 k. Hz f, ω → I I ≈ 1 = 0 f, ω → I I → 0 → - /2 Comportement en HF f = 100 k. Hz I I = 0, 707 = - /4 Rem : « presque » 2 demi-cercles…

Application n° 3 : Ordre 2, passif montage proposé en examen de TP « circuit » 2007 R 2 R 3 R 1 ve C 1 C 2 Il s’agissait d’établir la réponse harmonique théorique et expérimentale vs

Première étape : étude préalable du circuit R 1 C 1 R 2 C 2 Appliquons le théorème de Thévenin De ce schéma réduit, on déduit, par pont diviseur, Vs après remplacement des expressions de ETH et ZTH,

Deuxième étape : schéma de départ, et Thévenin aux bornes de C 1 R 2 ve R 3 R 1 C 1 On aboutit à : C 2 vs
, puis tracé de")
Au final, En remplaçant p par jω, on dispose de T(jω), puis tracé de la réponse harmonique D’après les valeurs numériques des composants : d’un filtre passe-bas, d’ordre 2 : - pour f tendant vers 0, une atténuation (conséquence du pont diviseur 0, 45, visible sur le schéma quand on retire les condensateurs) - une fréquence propre 1, 9 k. Hz, - au-delà, une asymptote de – 40 d. B / décade Corrigé complet sous une rubrique du site http: //membres. lycos. fr/cepls/circuit/circuit. pdf
![Nyquist Transfer function: T=tf([0, 0. 45] , [1/(11917)^2, 2*1. 9/11917, 1]) 0. 45 ----------------7.](http://slidetodoc.com/presentation_image/0f088de8ac19abf883f1173db5e2f016/image-111.jpg "Nyquist Transfer function: T=tf([0, 0. 45] , [1/(11917)^2, 2*1. 9/11917, 1]) 0. 45 ----------------7.")
Nyquist Transfer function: T=tf([0, 0. 45] , [1/(11917)^2, 2*1. 9/11917, 1]) 0. 45 ----------------7. 042 e-009 s^2 + 0. 0003189 s + 1 >> nyquist (T) >> bode (T) ω → 0 ω → ∞ ω > 0
 = Ve(p) VS 2(p) =")
Application n° 4 VS 1 VS 2 VS 1(p) = Ve(p) VS 2(p) = Ve(p) VS(p) = VS 1(p) – VS 2(p) VS(p) = Ve(p) Calculer 1 - R C p 1 1 + R C p Vs(p) Ve(p) = 1 - R C p 1 + R C p Réponse harmonique vs(j ) ve(j ) = 1 – j R C 1 + j R C Vs(p) Ve(p)

1 – j R C Nouveau ! Une fonction complexe comme 1 – j ω/ωn présente : Même module que 1 + j ω/ωn Phase opposée : 20 log 1 + j ω/ωn artg (–ω/ωn) = - artg (ω/ωn) Même module, même gain 0 90° 0 20 log 1 - j ω/ωn Phase inversée -90° Ce n’est pas un circuit à phase minimale
 ve(j")
20 log 1 - j ω/ωn 0 d. B numérateur 0 vs(j ) ve(j ) = 1 – j R C 1 20 log 1 + j ω/ωn 1 + j R C 1 dénominateur -90° 0 d. B 0 Ce circuit est un déphaseur -180°

Application n° 5: Ordre 1, actif montage à base d’une source liée Calculer vs(j ) / ve(j ) Tracer sa réponse harmonique Bode, Nyquist, Rem : on peut utiliser le formalisme p, puis remplacer p par jω ou travailler directement en jω
 pour les grandeurs variables : ve(jω)")
Remarque : par simplicité d’écriture, on omet (jω) pour les grandeurs variables : ve(jω) s’écrira ve … Posons ic, le courant circulant dans le condensateur (1) (2) (12) soit : (3) (21) : soit :
 pour les grandeurs variables : ve(jω)")
Remarque : par simplicité d’écriture, on omet (jω) pour les grandeurs variables : ve(jω) s’écrira ve … Expressions (12) de v’e et (21) ic que l’on reporte dans (3) (12) (21) (3) D’où : On aboutit à :

Application numérique. = Av = - 2 2 = 2 krad/s 1 k. 1 u 1 = 1 u (100 + 1000 + 200) soit fn = 318 Hz = 769 rad/s soit fd = 122, 5 Hz

= 2 krad/s Rappel : 1 – j ω/ωn présente : Même module que 1 + j ω/ωn Phase : = - artg (ω/ωn) T 1=tf([-1/2000, 1], [1]); 1 - j ω/ωn

Av = - 2 fn = 318 Hz fd = 122, 5 Hz Tracé de Bode f→ 0 ≈ Av = - 2 122, 5 Hz f→ ∞ 318 Hz ≈ - Avfd/fn ≈ 0, 77 6 d. B -6 d. B / oct f 0 d. B -2, 28 d. B 180 ° 1 Hz 100 Hz 1 k. Hz 100 k. Hz

Av = - 2 fn = 318 Hz fd = 122, 5 Hz 2 Lieu de Nyquist 100 Hz 1 1 k. Hz 10 k. Hz 1 Hz - 2 - 1 100 k. Hz 1 ≈ 0, 77
 (vu")
Application n° 6 : Ordre 2, actif montage à base d’ampli Op (parfait) (vu en cours « SEA 1 » ) Calculer us(j ) / ue(j ) Tracer sa réponse harmonique Bode, Nyquist.

RETARD PUR
 Réponse harmonique d’un retard pur Module = 1 p → j exp")
exp (–Tp) Réponse harmonique d’un retard pur Module = 1 p → j exp (-j T) Phase = R = - T retard pur + système linéaire retard 20 log {Module} = 0 d. B R = - T Réponse harmonique de l’association retard + système : Système connu 20 log {Module} : connu S : connue 20 log {Module} : inchangé = - T + S
 Tracé de - /4")
Exemple de base : retard + passe bas 1 (log) Tracé de - /4 S : - artg 1 Tracé de R : - T -1 Échelles non comparables !!! 0 T (lin) rad 1 T 0 repoussé à l’infini (log) ∞ D’où le tracé de = - T + S Courbe en exponentielle

Construction graphique : 1 Cas 1 : << La phase du premier ordre est à – 90° alors que la phase du retard n’a pas encore évolué 1 T 1 - /4 1 (log) T ∞ = - T + S ∞

Exemple numérique 1/ 1 << 1 T T = 0, 01 =1 Si T << , la phase du premier ordre est à – 90° alors que la phase du retard n’a pas encore évolué Premier ordre seul ≈ -90° à 10 rad/s, T = 0, 1 rad Premier ordre + retard Retard pur seul ≈ -6° exponentielle

Construction graphique : Cas 2 : 1 T 1 << La phase du retard est très importante alors que la phase du premier ordre n’a pas encore évolué 1 1 T ∞ (log) La rotation de phase de 90° est négligeable

Exemple numérique : 1 T 1 << T = 100 =1 Si T >> , la phase du retard est très importante alors que la phase du premier ordre n’a pas encore évolué Premier ordre seul ≈ -qq° À 0, 1 rad/s Premier ordre + retard Retard pur seul = - 10 rad = - 570°

Les retards purs sont très présents dans des domaines de la physique : thermique acoustique Transmission par des lignes, réseaux, en longues distances Ondes radio Dans les asservissements, les retards purs sont néfastes.

« CIRCUIT » Transformées de Laplace Analyse harmonique Quadripôles

QUADRIPOLES Les différents quadripôles Applications

QUADRIPOLES Les différents quadripôles Applications

On appelle entrée l'accès 11' sortie l'accès 22' Tripôle Matrice représentative de quadripôle : Matrice 2 x 2 Un quadripôle contenant au moins une source (de courant ou de tension) est un quadripôle actif. Un quadripôle passif ne contient aucune source. Tout quadripôle est complètement caractérisé par les 4 éléments d’une de ses matrices représentatives. Il existe plusieurs matrices représentatives.

Matrice d’impédance U 1 = Z 11 I 1 + Z 12 I 2 U 2 = Z 21 I 1 + Z 22 I 2 On « mesure » la valeur des éléments en imposant une source à un accès et laissant l’autre en circuit ouvert. I 2=0 Circuit équivalent I 1=0 impédance d'entrée à circuit ouvert impédance de sortie à circuit ouvert impédances de transfert à circuit ouvert

Matrice d’admittance I 1 = Y 11 U 1 + Y 12 U 2 I 2 = Y 21 U 1 + Y 22 U 2 La matrice Y est l’inverse de la matrice Z. Circuit équivalent Elle n’existe donc pas toujours (il faut que Z, si elle existe, soit inversible) admittance d'entrée en court-circuit admittance de sortie en court-circuit admittances de transfert en court-circuit.

Matrices de chaîne T Rem : le coef A représente U 1/U 2 à I 2 nul Matrices de transmission t Rem : confusion possible avec matrice de chaîne Matrices hybrides H Rem : les éléments des matrices hybrides sont de différentes dimensions (V/A, A/V, sans dimension). Matrices autres…

Il existe des relations de passage pour déterminer une matrice à partir d’une autre. Pourquoi autant de matrices ?
 Lors de connexion entre quadripôles, on choisit une matrice ou une autre pour")
1) Lors de connexion entre quadripôles, on choisit une matrice ou une autre pour calculer plus facilement la matrice résultante. série : [Z] = [Z’] + [Z’’] parallèle : [Y] = [Y’] + [Y’’] Connexion cascade Matrice de chaîne [ T ] = [ T’ ]. [ T’’ ]
 Selon le montage électronique, on choisit une matrice qui existe et qui est")
2) Selon le montage électronique, on choisit une matrice qui existe et qui est « facile » (à identifier). Exemple sur un quadripôle passif (exemple 1): I 1 U 1 I 2 U 2 Il vient : impédance d'entrée à circuit ouvert : impédance de sortie à circuit ouvert : Z Z
 Selon le montage électronique, on choisit une matrice qui existe et qui est")
2) Selon le montage électronique, on choisit une matrice qui existe et qui est « facile » (à identifier). Exemple sur un quadripôle passif (exemple 1): I 1 U 1 I 2 U 2 impédances de transfert = Z à circuit ouvert.
 Selon le montage électronique, on choisit une matrice qui existe et qui est")
2) Selon le montage électronique, on choisit une matrice qui existe et qui est « facile » (à identifier). Exemple sur un quadripôle passif (exemple 1): I 1 I 2 U 1 d’où Pour info :
 Selon le montage électronique, on choisit une matrice qui existe et qui est")
2) Selon le montage électronique, on choisit une matrice qui existe et qui est « facile » (à identifier). Autre exemple sur un quadripôle passif (exemple 2): impédance d'entrée à circuit ouvert. impédance de sortie à circuit ouvert. impédances de transfert à circuit ouvert. Il vient :
 Selon le montage électronique, on choisit une matrice qui existe et qui est")
2) Selon le montage électronique, on choisit une matrice qui existe et qui est « facile » (à identifier). Autre exemple sur un quadripôle passif (exemple 3): Il vient : Rem 1 : si on fait Zb 0, on retrouve la matrice Z du quadripôle précédent Rem 2 : si on fait Za 0, on détermine la matrice Z(p) du quadripôle suivant : Il vient : utilisé en T. P. « circuit » : quadripôle passif sans pertes
 Selon le montage électronique, on choisit une matrice qui existe et qui est")
2) Selon le montage électronique, on choisit une matrice qui existe et qui est « facile » (à identifier). Autre exemple sur un quadripôle passif (exemple 4): impédance d'entrée à circuit ouvert. impédance de sortie à circuit ouvert. impédances de transfert à circuit ouvert. Il vient :

Pour info, matrice hybride : Quadripôles en cascade : la matrice de chaîne T résultante est le produit des matrices T de chaque quadripôles (ordre des matrices = ordre des Quadripôles, avec cette écriture des matrices) Il vient : Produit des matrices

Intéressant : quadripôles en Z du transformateur M : mutuelle inductance Transformateur seul Transformateur chargé M 2 = L 1 L 2 association de 2 quadripôles On montre que : soit : adapté si Zs = Ze = Zu n 2 ≈ avec

QUADRIPOLES Les différents quadripôles Applications
 Fonction de transfert d’un réseau passif : par quadripole Calculer U 2(p)/U 1(p)")
1) Fonction de transfert d’un réseau passif : par quadripole Calculer U 2(p)/U 1(p) On reconnaît des « quadripôles » en cascade : la matrice de chaîne T résultante est le produit des matrices T de chaque quadripôle. Z Il vient : Z Produit des matrices le coef A représente U 1/U 2 à I 2 nul D’où une façon de calculer la fonction de transfert U 2/U 1 = 1/A U 2(p) 1 = U 1(p) 1+RCp
 Continuons le réseau Rappel : Z Z (que l’on pouvait écrire directement) =")
2) Continuons le réseau Rappel : Z Z (que l’on pouvait écrire directement) = déjà vu ! => V 2(p) V 1(p) 1 =
 Continuons le réseau Il « suffit » d’ajouter une matrice dans le produit")
3) Continuons le réseau Il « suffit » d’ajouter une matrice dans le produit : Limitons-nous au calcul du seul coefficient utile : D’où, après développement : À noter quelque part ! Et ce, avec R 1=R 2=R 3=R et C 1=C 2=C 3=C V 2(p) V 1(p)
 Modèle du transistor bipolaire en régime dynamique linéaire petits signaux : quadripôle B")
4) Modèle du transistor bipolaire en régime dynamique linéaire petits signaux : quadripôle B C E Son fonctionnement peut être décrit par un quadripôle hybride. Chaque paramètre (h 11, h 12, h 21, h 22) représente un phénomène distinct au sein du transistor. (Par exemple le coefficient β est h 21). Rem : il existe d’autres modèles pour représenter le fonctionnement du transistor bipolaire en régime dynamique linéaire petits signaux.
 adapter une charge à une source, de façon à maximiser le transfert de")
5) adapter une charge à une source, de façon à maximiser le transfert de puissance moyenne Cas basique : on dispose d’une source, d’une charge, mais non adaptée P est fonction de RL P passe par un maximum pour RL = Rth
 adapter une charge à une source, de façon à maximiser le transfert de")
5) adapter une charge à une source, de façon à maximiser le transfert de puissance moyenne Cas basique : on dispose d’une source, d’une charge, mais non adaptée On intercale un quadripôle : (1) (2) De (2) on déduit I 2 que l’on place dans (1), pour en sortir U 1/I 1 = Zin: Un calcul similaire donne U 2/I 2 (à Eg = 0) ) Zout : Rem : relation utilisée tout à l’heure
 adapter une charge à une source, de façon à maximiser le transfert de")
5) adapter une charge à une source, de façon à maximiser le transfert de puissance moyenne (suite) Le quadripôle doit être réglé pour avoir : (condition de transfert maximal de puissance) Et Q ayant le moins de pertes possible ou selon un cahier des charges donnant l’atténuation sortie/entrée. max QUADRIPOLE ADAPTATEUR D’IMPEDANCES Sans résistance
 : quadripôle")
Exemples de montage adaptateur d’impédance : cas de figure fréquent (en HF) : quadripôle passif Les quadripôles passifs (sans source interne), sont définis par 3 paramètres. donne : Pour un quadripôle passif, nous avons Z 21 = Z 12 Si ce quadripôle passif est symétrique, nous avons Z 11 = Z 22 (symétrique : permutation entrée/sortie sans conséquence)
 : 600 Ohm 50 Ohm Adapté 600 Ohm Adapté 50")
Exemple concret (purement résistif) : 600 Ohm 50 Ohm Adapté 600 Ohm Adapté 50 Ohm 612, 21 34, 991 51, 01 Logiciel : RFSIM 99 (disponible sur le Web) Vue du point (1), l’impédance est : 577, 13 + 34, 991 // (16, 019+50) = Vue du point (2), l’impédance est : 16, 019 + 34, 991 // (577, 13+600) = 600 50

Il existe aussi le quadripôle en PI : Peut se calculer par : - Association de matrices de chaînes T - Passage étoile/triangle (Kennelly), si quadripôle en Té connu

KENNELLY Et réciproquement Source Wikipedia

Même exemple concret : 600 Ohm 50 Ohm Adapté 600 Ohm Adapté 50 Ohm Vue du point (1), l’impédance est : 1, 873 k // 857, 365 + (51, 981 // 50) = 600 Vue du point (2), l’impédance est : 51, 981 // (857, 365 + (1, 873 k // 600) = 50

Exemples de montage adaptateur d’impédance en PI : Extrait de schéma analysé en ERII 4 (sujet d’examen…)

Exemples de montage adaptateur d’impédance en PI : Extrait de schéma analysé en ERII 4 (sujet d’examen…) On atténue puis on amplifie… Mais c’est mieux que d’être désadapté Et plus robuste en cas de fluctuation d’impédance
- Slides: 162