Chapter 9 Rotational Dynamics Torque any force that





 No")
 Point on object where all weight is")







 – inertia of a rigid rotating body w/ respect to axis")
 Moment of Inertia (kg∙m 2) Angular")


")


- Slides: 28
Chapter 9 Rotational Dynamics
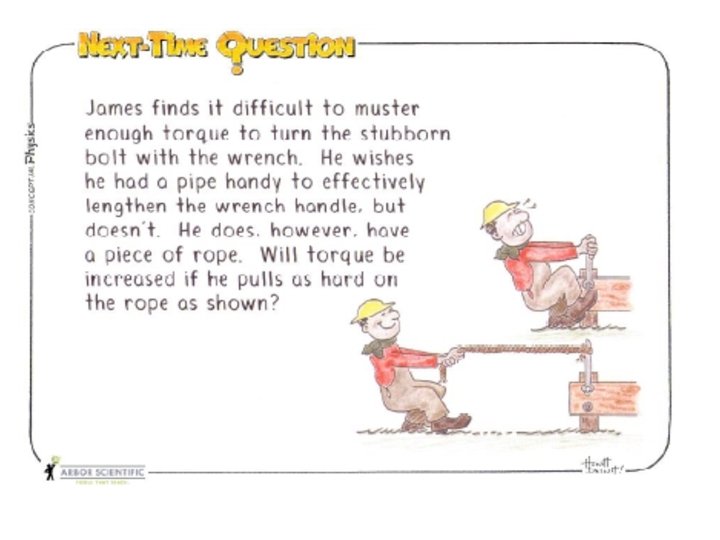
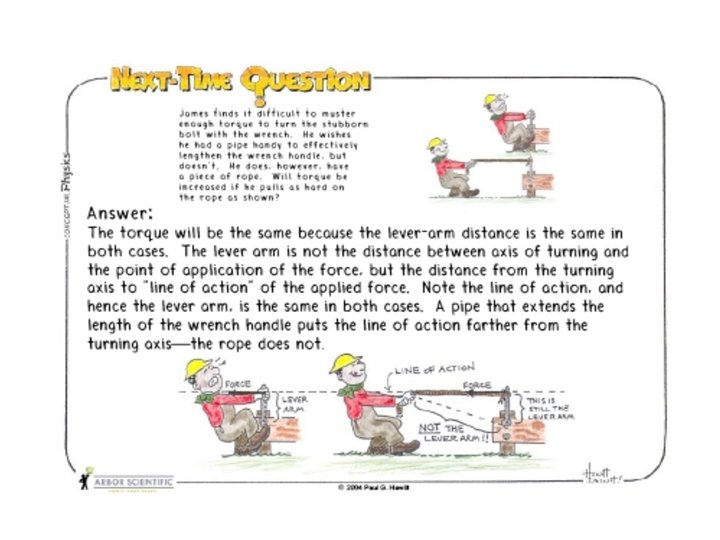
Torque – any force that can cause a rotation Torque = Force x Lever Arm A net force causes an acceleration. A net torque causes an rotation.
Lever Arm – perpendicular distance b/w line of action & axis of rotation. Line of Action – extended line drawn through force.
T > 0, when ccw T < 0, when cw
ASSIGNMENT Ch. 9 #1, 2, 6, 7 p. 265
Equilibrium – net external forces and torques are zero. No translational acceleration (a) No angular acceleration (α)
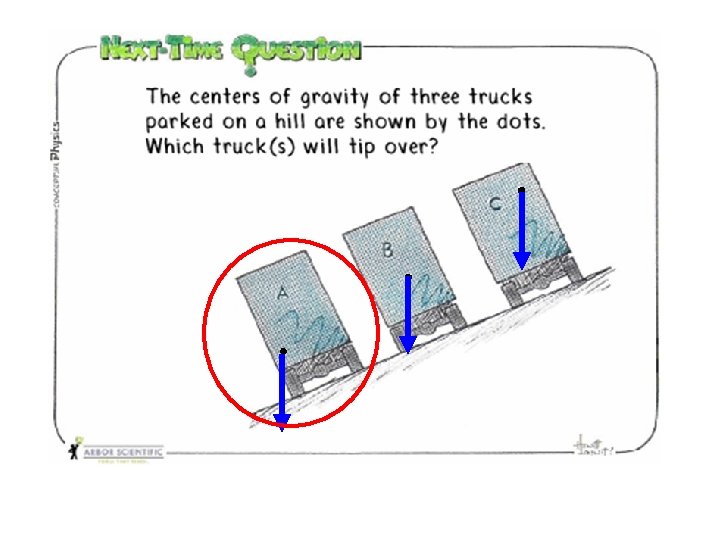
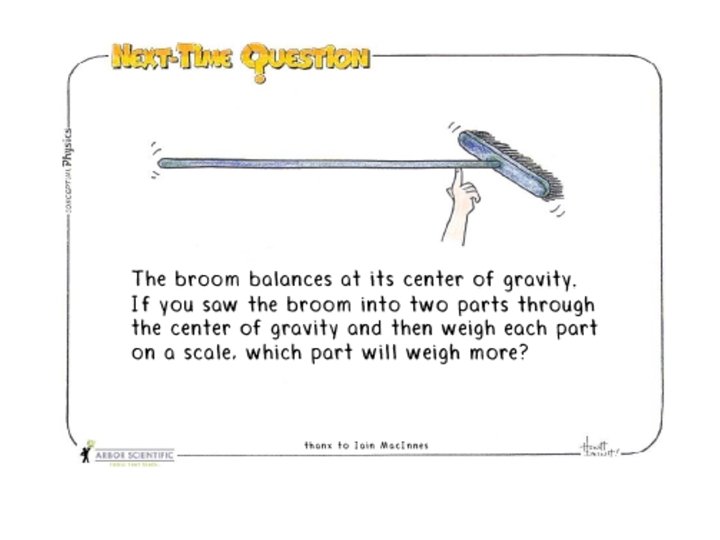
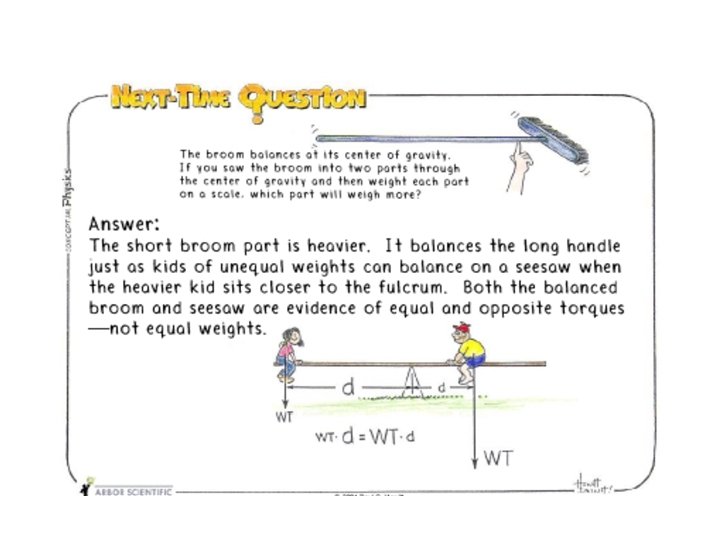
Center of Gravity (C. O. G. ) Point on object where all weight is concentrated. Same as center of mass for most objects. Balance point of object; object will tip over (rotate) when c. o. g. is beyond support base.
An irregular object acts as if all of its mass is at the center of mass.
If the c. o. g. is above the base, the object will not topple over.
This object will tip over.
ASSIGNMENT Read 9. 2 & 9. 3 Ch. 9 #12, 14, 17, 22 p. 266
Mass - measure of inertia. Inertia - Resistance to change in motion. Newton’s 2 nd Law A bigger mass requires more force for the same acceleration. * *rotating objects acquire an additional amount of inerita (called rotational inertia)
These objects have the same mass. it must have less inertia Which would be easier to rotate? Rotational inertia depends on mass distribution.
These objects have the same mass. it must have less inertia Which would be easier to rotate? Rotational mass depends on axis of rotation.
Rotational Inertia (I) – inertia of a rigid rotating body w/ respect to axis of rotation. AKA ‘moment of inertia’ Depends on mass distribution and axis of rotation.
2 nd Law for Rotational Motion Torque (N∙m) Moment of Inertia (kg∙m 2) Angular acceleration (rad/s 2) Formulas for I are on page 251
Which will reach the bottom first?
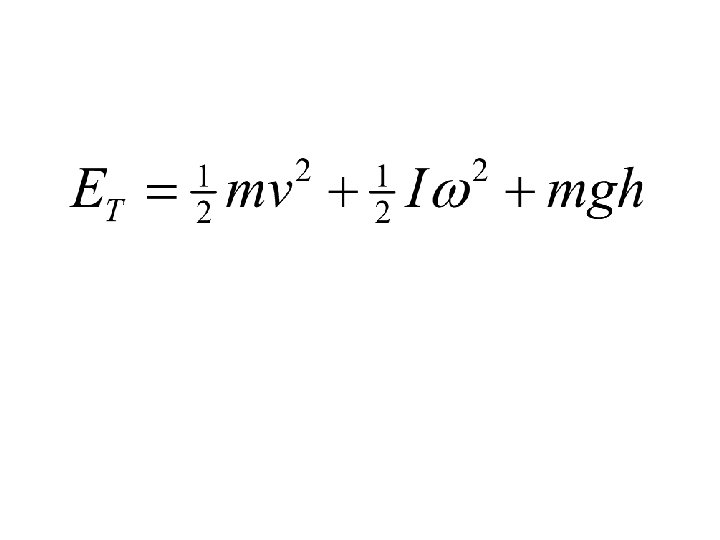
Work Rotational Work Kinetic Energy Rotational KE
Formulas for Rotational Inertia (I)
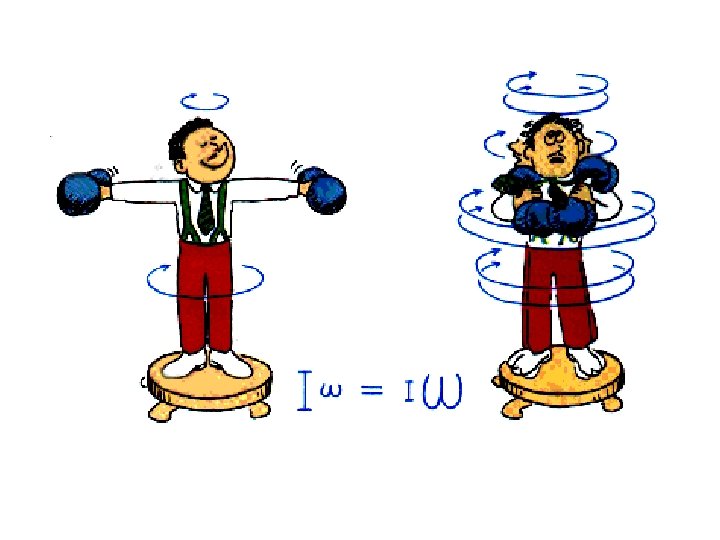
Momentum Angular Momentum - Conservation of Angular Momentum The total L of a system remains constant if the net external torque acting on the system is zero.
ASSIGNMENT: Ch. 9 #32, 35, 54 page 268