Chapter 7 Control of Manipulator DC DCDirect Current
")
 모터의 모델 입력: 전압(voltage) 출력: 관성부하(inertial load)의 회전속도(rotational velocity)")
 back electromotive-force")
 and, (7. 6) Electric model Electromagnetic")

 and (7. 12) Continuous")
 Θ Θr t 8")
 V Θ G(s) - C(s):")


 Rise Time Overshoot Settling Time")
 Rise Time Overshoot Settling Time")
 Rise Time Overshoot Settling Time")

 로 부터 Kp,")


- Slides: 21
Chapter 7 머니퓰레이터 제어(Control of Manipulator)
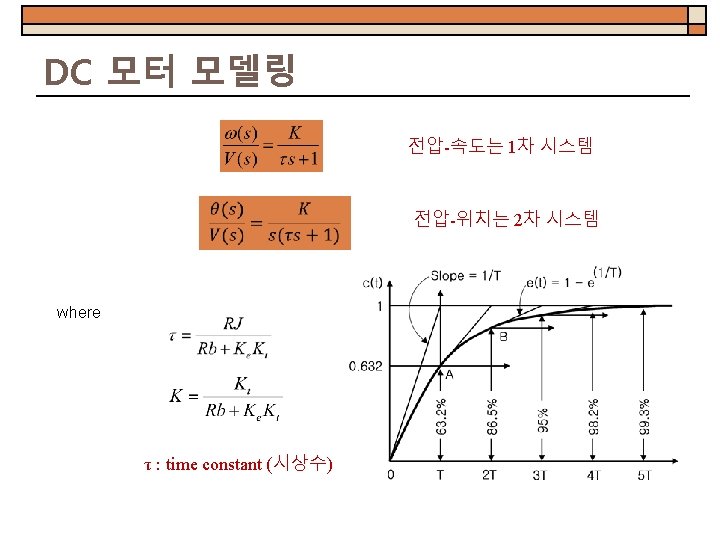
DC 모터 모델링 DC(Direct Current) 모터의 모델 입력: 전압(voltage) 출력: 관성부하(inertial load)의 회전속도(rotational velocity) SISO(Single Input Single Output) system 주요 물리량: 저항(R), 인덕턴스(L) 그림 7. 2 DC 모터의 모델 2
DC 모터 모델링 For armature-controlled moter the motor torque is (7. 1) back electromotive-force voltage(EMF) (7. 2) the equation of motor (7. 3) and, (7. 4) 3
DC 모터 모델링 For armature-controlled motor (7. 5) and, (7. 6) Electric model Electromagnetic model Mechanical model + - 그림 7. 3 모터의 동적 모델 블록도 4
DC 모터 모델링 : 2차 시스템 since physically we can make the first order model as : 1차 시스템 Electric model Electromagnetic model Mechanical model + - 그림 7. 3 모터의 동적 모델 블록도 5
예제 7 -1 Physical model of motor By (7. 11) and (7. 12) Continuous model of motor By (7. 19) to (7. 22) 7
DC 모터 제어 Open-Loop Control Θr T V Θ G(s) Θ Θr t 8
DC 모터 제어 Closed-loop Control Θr E + C(s) V Θ G(s) - C(s): Controller Θr Θ t 9
DC 모터 제어 PID Controller Frequency Domain Θr + E + - + V G(s) Θ + 10
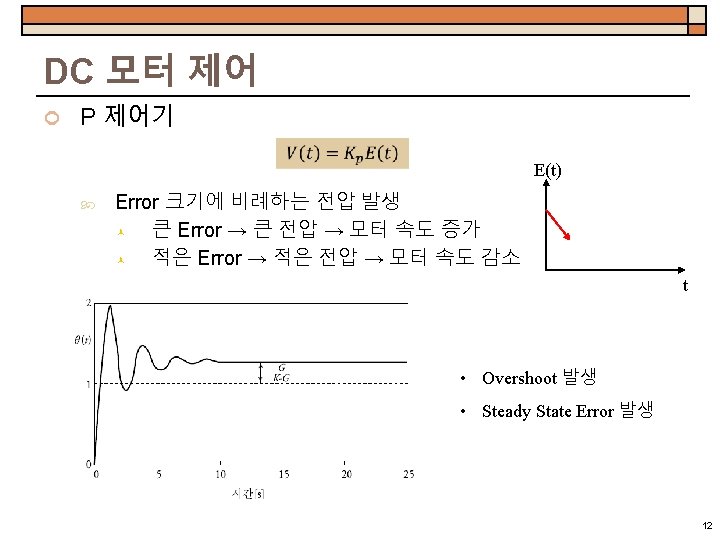
DC 모터 제어 PID Controller Time Domain Θr + E + - Error 크기에 비 례 + V G(s) Θ + Error 기울기에 비례 Error 면적에 비 례 11
DC 모터 제어 P 제어기 Increasing Kp (P Gain) Rise Time Overshoot Settling Time Steady State Error Decrease Increase Small change Decrease 2. 0 1. 0 0. 5 13
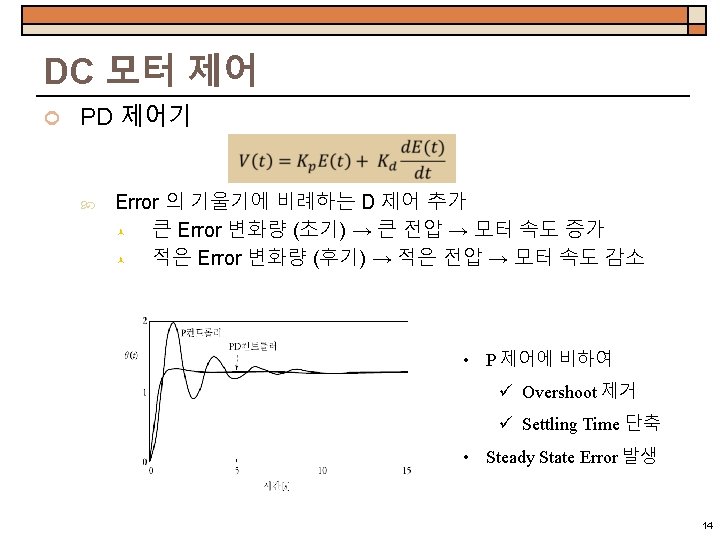
DC 모터 제어 PD 제어기 Increasing Kd (D gain) Rise Time Overshoot Settling Time Steady State Error Small change Decrease 5 None 0 10 15
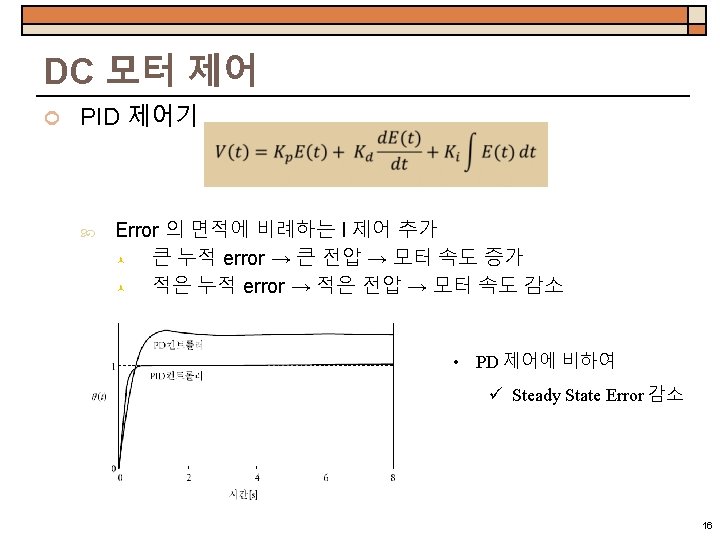
DC 모터 제어 PID 제어기 Increasing Ki (I gain) Rise Time Overshoot Settling Time Steady State Error Small change Increase Eliminate 17
PID Tuning P, I, D Gain 의 관계 Rise Time Overshoot Settling Time Steady State Error Kp Decrease Increase Small change Decrease Kd Small change Decrease None Ki Small change Increase Eliminate 지능형 로봇 공학(사이텍미디어) 18
PID Tuning Ziegler-Nichols Method Plant 에 대한 step response (transient state) 로 부터 Kp, Kd, Ki 를 설정하는 실험적 방법 19
PID Tuning Ziegler-Nichols Method-Case 1 S-shaped step response 20
PID Tuning Ziegler-Nichols Method-Case 2 21