Chapter 6 Trajectory Planning of Manipulator Path vs
")
 Sequences of points (configurations) Path planning Trajectory (궤적) Time")
 motion Cartesian")

 Initial & final conditions - Initial position, velocity, acceleration")


- Slides: 29
Chapter 6 머니퓰레이터 궤적 계획 (Trajectory Planning of Manipulator)
Path vs. Trajectory Path (경로) Sequences of points (configurations) Path planning Trajectory (궤적) Time history of position, velocity, and accelerations Trajectory planning v Motion Planning = Path Planning + Trajectory Planning 2
관절공간 vs. 직교공간 Joint-space trajectory planning Joint variable 의 interpolation Point-to-Point (PTP) motion Cartesian space 에서의 중간경로 예측 어렵다 명령어: MOVE P 1 Spot Welding 3
관절공간 vs. 직교공간 Cartesian-space trajectory planning Cartesian variable 의 interpolation Linear motion / Circular motion 등 중간 이동경로가 중요한 작업: Arc Welding 등 명령어 예: MOVEL P 1, MOVEC P 2 4
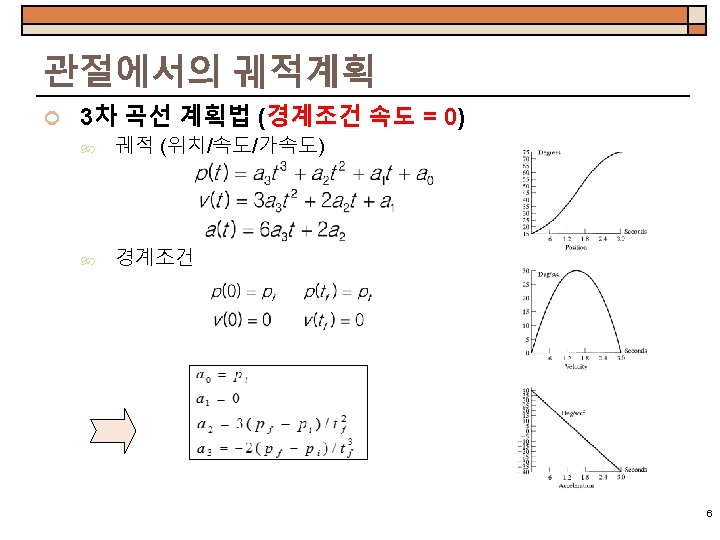
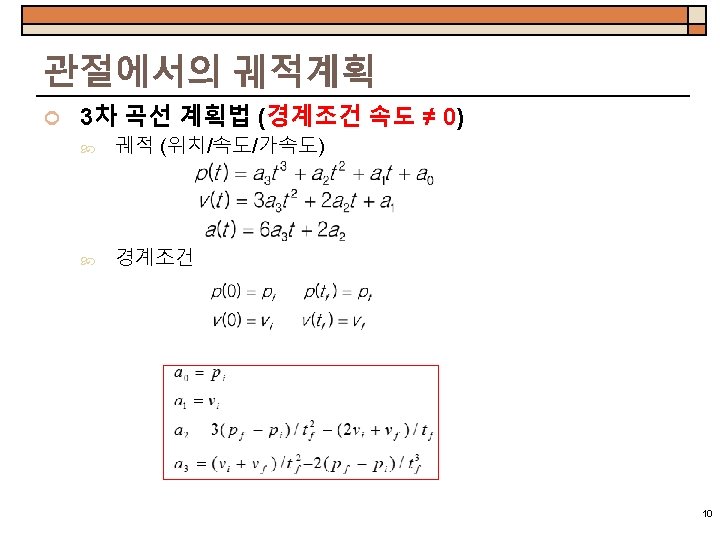
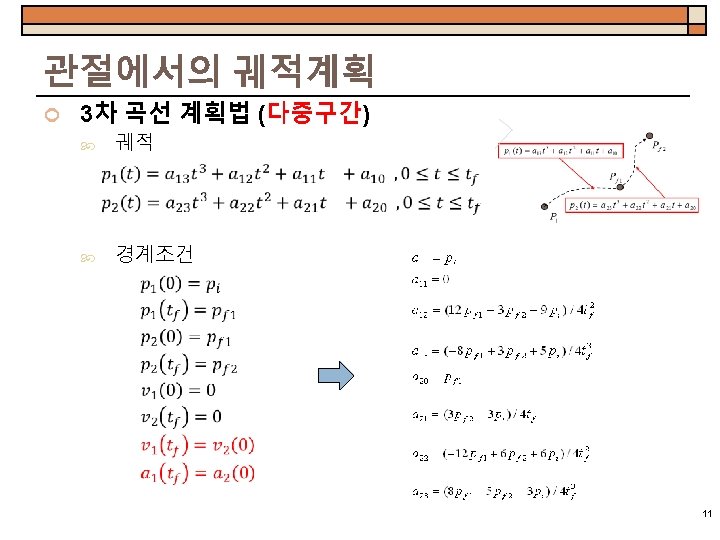
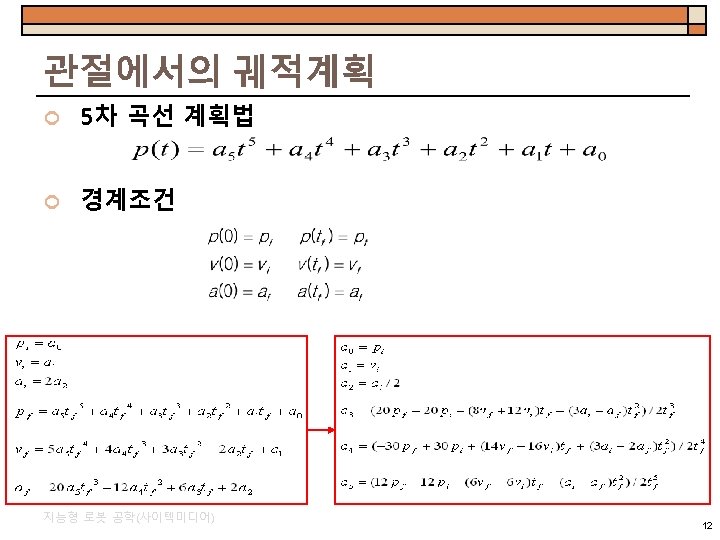
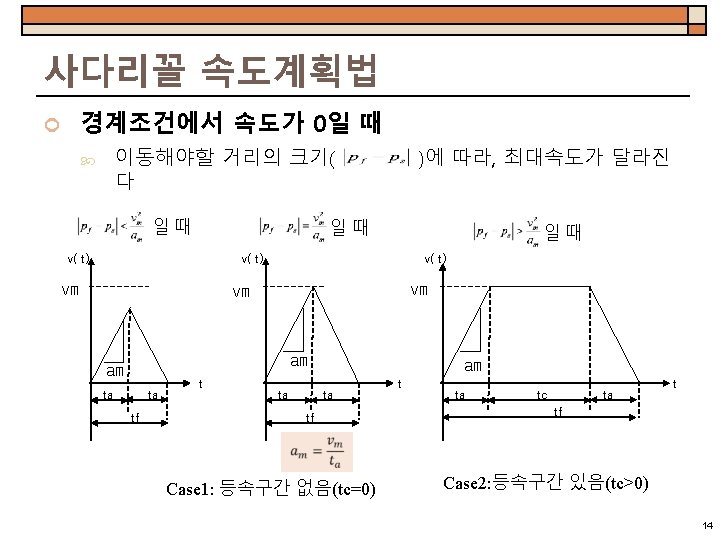
궤적계획 시 고려할 점 1) Initial & final conditions - Initial position, velocity, acceleration - Final position, velocity, acceleration 2) Smooth conditions (예) 물컵 배달 로봇, 웨이퍼 핸들링 로봇 3) Via points 4) Elapsed time 5
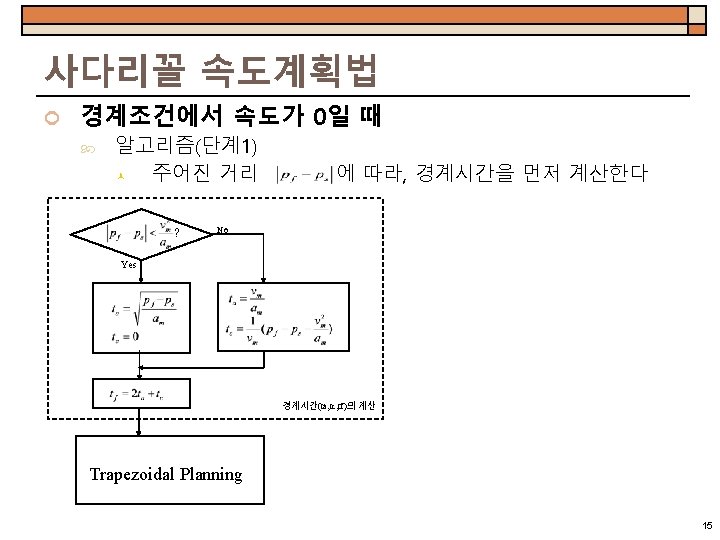
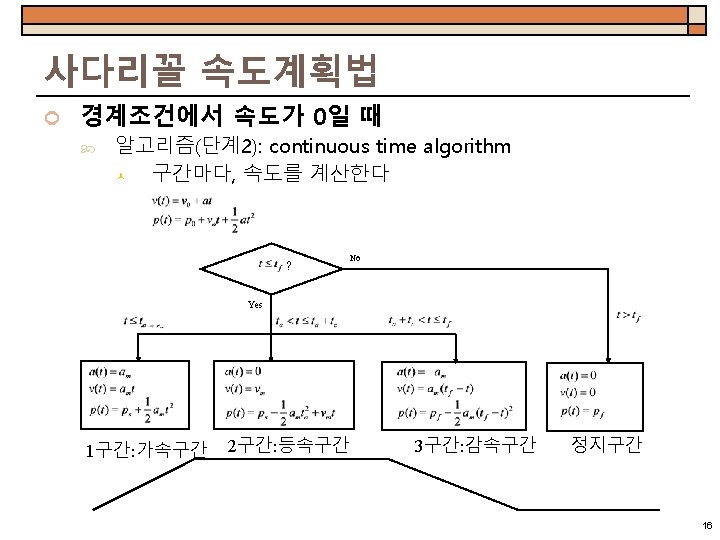
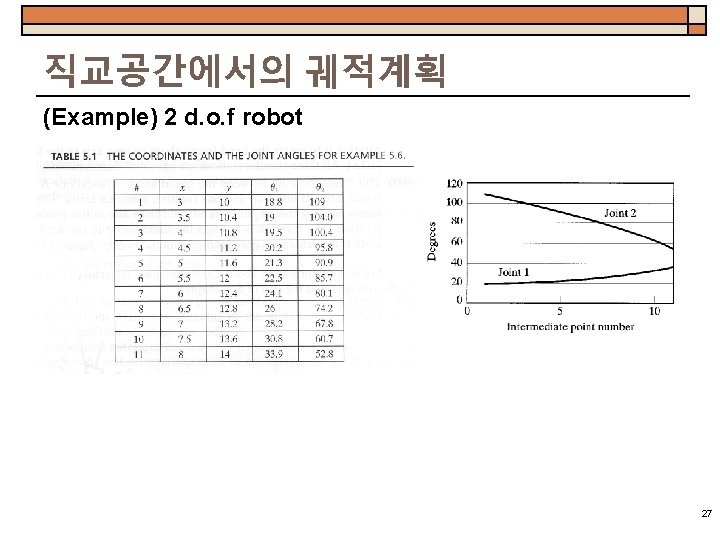
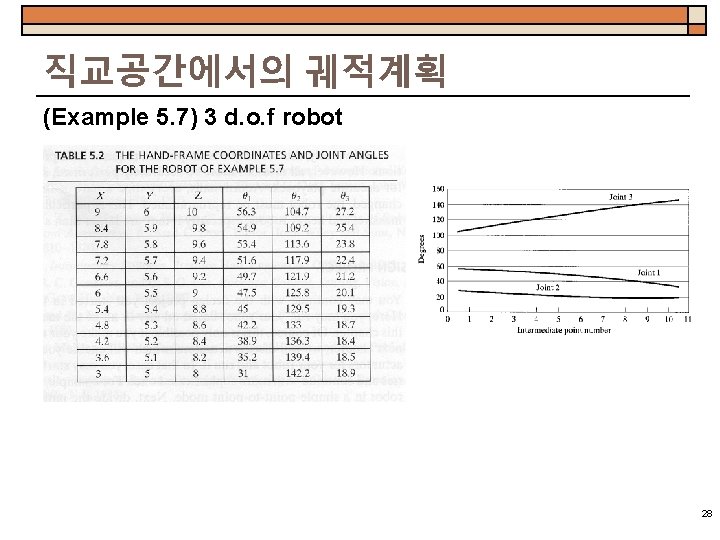
직교공간에서의 궤적계획 S 1. Increment the time t = t + Δt S 2. Calculate the position and orientation of hand P = P(t), R = R(t) S 3. Calculate joint values : inverse kinematics θ 1, … , θ n S 4. Send the joint values to joint (motor) controller S 5. Go to S 1 26
직교공간에서의 궤적계획 Cartesian space planning 시 고려사항 1. 많은 계산량: inverse kinematics 2. Intermediate points unreachable 3. Sudden joint-angle change around sigularities 29