Chapter 3 The Laplace Transform 3 1 Definition




 f is PC on if there")
![If f is PC on [0, k], then so is and exists 6](https://slidetodoc.com/presentation_image_h2/4f2e96b352b88778919c9d0790be423e/image-6.jpg "If f is PC on [0, k], then so is and exists 6")






![○ Theorem 3. 6: Laplace transform of : PC on [0, k] for s](https://slidetodoc.com/presentation_image_h2/4f2e96b352b88778919c9d0790be423e/image-13.jpg "○ Theorem 3. 6: Laplace transform of : PC on [0, k] for s")
 and (8) 14")

, 16")














 ○ Theorem 3. 12:")






 by the integrating factor 38")


![◎ Theorem 3. 14: PC on [0, k], 41](https://slidetodoc.com/presentation_image_h2/4f2e96b352b88778919c9d0790be423e/image-41.jpg "◎ Theorem 3. 14: PC on [0, k], 41")
 ------(B) 42")
 by , 43")



- Slides: 47
Chapter 3: The Laplace Transform 3. 1. Definition and Basic Properties 。 Objective of Laplace transform -- Convert differential into algebraic equations ○ Definition 3. 1: Laplace transform s. t. converges s, t : independent variables * Representation: 1
。Example 3. 2: Consider 2
3
* Not every function has a Laplace transform. In general, can not converge 。Example 3. 1: 4
○ Definition 3. 2. : Piecewise continuity (PC) f is PC on if there are finite points s. t. and are finite i. e. , f is continuous on [a, b] except at finite points, at each of which f has finite one-sided limits 5
If f is PC on [0, k], then so is and exists 6
◎ Theorem 3. 2: Existence of f is PC on If Proof: 7
* Theorem 3. 2 is a sufficient but not a necessary condition. 8
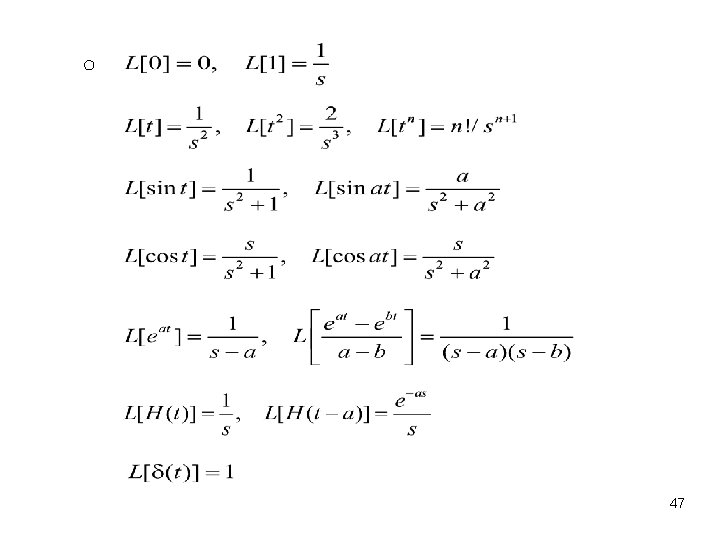
* There may be different functions whose Laplace transforms are the same e. g. , and have the same Laplace transform ○ Theorem 3. 3: Lerch’s Theorem * Table 3. 1 lists Laplace transforms of functions 9
○ Theorem 3. 1: Laplace transform is linear Proof: ○ Definition 3. 3: . Inverse Laplace transform e. g. , * Inverse Laplace transform is linear 10
3. 2 Solution of Initial Value Problems Using Laplace Transform ○ Theorem 3. 5: Laplace transform of f: continuous on : PC on [0, k] Then, ------(3. 1) 11
Proof: Let 12
○ Theorem 3. 6: Laplace transform of : PC on [0, k] for s > 0, j = 1, 2 … , n-1 13
。 Example 3. 3: From Table 3. 1, entries (5) and (8) 14
15
○ Laplace Transform of Integral From Eq. (3. 1), 16
3. 3. Shifting Theorems and Heaviside Function 3. 3. 1. The First Shifting Theorem ◎ Theorem 3. 7: ○ Example 3. 6: Given 17
○ Example 3. 8: 18
3. 3. 2. Heaviside Function and Pulses ○ f has a jump discontinuity at a, if exist and are finite but unequal ○ Definition 3. 4: Heaviside function 。 Shifting 19
。 Laplace transform of heaviside function 20
3. 3. 3 The Second Shifting Theorem ◎ Theorem 3. 8: Proof: 21
○ Example 3. 11: Rewrite 22
◎ The inverse version of the second shifting theorem ○ Example 3. 13: where rewritten as 23
24
25
3. 4. Convolution 26
◎ Theorem 3. 9: Convolution theorem Proof: 27
◎ Theorem 3. 10: ○ Exmaple 3. 18 ◎ Theorem 3. 11: Proof : 28
○ Example 3. 19: 29
3. 5 Impulses and Dirac Delta Function ○ Definition 3. 5: Pulse ○ Impulse: ○ Dirac delta function: A pulse of infinite magnitude over an infinitely short duration 30
○ Laplace transform of the delta function ◎ Filtering (Sampling) ○ Theorem 3. 12: f : integrable and continuous at a 31
Proof: 32
by Hospital’s rule ○ Example 3. 20: 33
3. 6 Laplace Transform Solution of Systems ○ Example 3. 22 Laplace transform Solve for 34
Partial fractions decomposition Inverse Laplace transform 35
3. 7. Differential Equations with Polynomial Coefficient ◎ Theorem 3. 13: Proof: ○ Corollary 3. 1: 36
○ Example 3. 25: Laplace transform 37
Find the integrating factor, Multiply (B) by the integrating factor 38
Inverse Laplace transform 39
○ Apply Laplace transform to algebraic expression for Y Apply Laplace transform to Differential equation for Y 40
◎ Theorem 3. 14: PC on [0, k], 41
○ Example 3. 26: Laplace transform ------(A) ------(B) 42
Finding an integrating factor, Multiply (B) by , 43
In order to have 44
Formulas: ○ Laplace Transform of Derivatives: ○ Laplace Transform of Integral: 45
○Shifting Theorems: ○ Convolution: Convolution Theorem: ○ 46