CHAPTER 2 SENSORS Sensor Definition A sensor is


 INPUT COMMAND PROCESSING CONTROL")


 Ø")




 Accuracy (exactitude, opposite of error) Sensitivity to other environmental parameters")















 Cheap & fast detection Difference")








 Sensor output is either analog")



- Slides: 42
CHAPTER 2: SENSORS
Sensor Definition: A sensor is a device that detects and responds to some type of input from the physical environment. The specific input could be light, heat, motion, moisture, pressure, or any one of a great number of other environmental phenomena.
Sensors provide the information about its environment (internal or external) INPUT COMMAND PROCESSING CONTROL ACTUATORS RESPONS E FEEDBACK SENSORS Knowing about sensors enables: v Proper selection of the sensors for a given application v Proper model the sensor system, e. g. resolution, bandwidth etc. v Define the needs in collaboration with the sensor system suppliers.
Type of sensors Acoustic & sound sensor Automotive sensor Example: Speedometer, Radar gun, fuel ratio meter Chemical sensor Measure the sound level based on acoustic wave. Example : Microphone, Hydrophone Transforms chemical information composition, presence of a particular element or ion, concentration, chemical activity, partial into analytically useful signal Example: PH sensor Electric & magnetic sensor Do not directly measure the physical properties of interest Example: Metal detector, Hall sensor measure flux density
Type of sensors Environmental sensor Optical sensor Electronic detector that convert light, or a change in light into an electronic signal Example: Photo diode, Photo transistor, camera Mechanical sensor This integrated sensor combine barometric air pressure, humidity, ambient air temperature sensing function as well as air quality measuring. Example : Rain gauge, Snow gauge Used for positioning or limit switch task Example: Strain gauge, potentiometer measure displacement, limit switch Proximity & presence sensor Able to detect presence of objects Emit electromagnetic radiation Example: Motion detector, proximity sensor
Classification of Sensors Proprioceptive sensors Ø Measure values internally to the system (robot) Ø E. g. motor speed, wheel load, battery status Exteroceptive sensors Ø Information from the robot’s environment Ø Distances to objects, intensity of the ambient light, etc. Passive sensors Ø Sensors that monitor the environment without disturbing it Ø E. g. digital camera, gyroscope Active sensor Ø Emit their own energy and measure the reaction Ø Better performance, but some influence on environment Ø E. g. sonar sensor, laser scanner, infrared sensor
Classification Local sensors Ø On-board sensors or mounted on the robot Global sensors Ø Sensor mounted outside the robot in its environment and transmitting sensor data back to the robot
Examples INTERNAL EXTERNAL LOCAL GLOBAL PASSIVE Temperature sensor Accelerometer Shaft encoder Inclinometer Tactile PASSIVE - ACTIVE - PASSIVE On-board camera PASSIVE Overhead Camera Satellite GPS ACTIVE Sonar sensor IR sensor Laser ACTIVE Sonar sensor
Characteristic Power consumption, size Range of full scale Dynamic range Lower and upper limits E. g. triangulation range finder may provide unpredictable values outside its working range Ratio between the smallest and largest possible values of a changeable quantity (e. g. sound, light, etc. ) Often specified in decibels (ratio between powers) E. g. power measurement from 1 m. W to 20 W. Resolution Smallest input change that can be detected (due to noise, physical limitations or determined by the A/D conversion)
Characteristic Linearity Hysteresis The speed at which a sensor can provide a stream of readings Usually there is an upper limit depending on the sensor Sampling rate Path-dependency (e. g. thermostats, some tactile sensors) Bandwidth or Frequency Variation of output signals as function of the input signal Sometimes expressed as % of full scale One has also to consider delay (phase) of the signal Sensitivity Ratio of output change to input change
Characteristic Cross-sensitivity (and cross-talk) Accuracy (exactitude, opposite of error) Sensitivity to other environmental parameters (e. g. thermal drift) Influence of other active sensor Degree of conformity between the measurement and true value Often expressed as a portion of the true value Precision Relates to reproducibility of sensor results Ratio of sensor’s output range to the standard deviation of error
Analog or digital? Many sensors are ANALOG. Some sensors have 2 types : ANALOG + DIGITAL Which is better ? Ø Consideration: Ø Ø Ø Number of analog sensor is greater than digital Analog sensor require AD converter to interface with controller Digital sensor is complex but more accurate
Analog or digital? Feedback Digital sensor To microcontroller Digital signal Feedback Analog Sensor AD To microcontroller Digital signal Analog signal
AD Converter An A/D converter translates an analog signal into a digital value. The characteristics of an A/D converter include: Ø Ø Ø Accuracy v Expressed in the number of digits it produces per value (for example 8 -bit A/D converter) Speed v Expressed in maximum conversion per second (for example 500 conversion per second) Measurement range v Expressed in volts (for example 0. 5 V)
Binary Sensor Return a single bit of information, either 0 or 1 Example : Tactile Sensor A resistor to link to a digital input A pull-up resistor will generate a high signal unless the switch is activated This is called an “active low” setting. Vcc Input signal GND R(e. g. 5 kΩ)
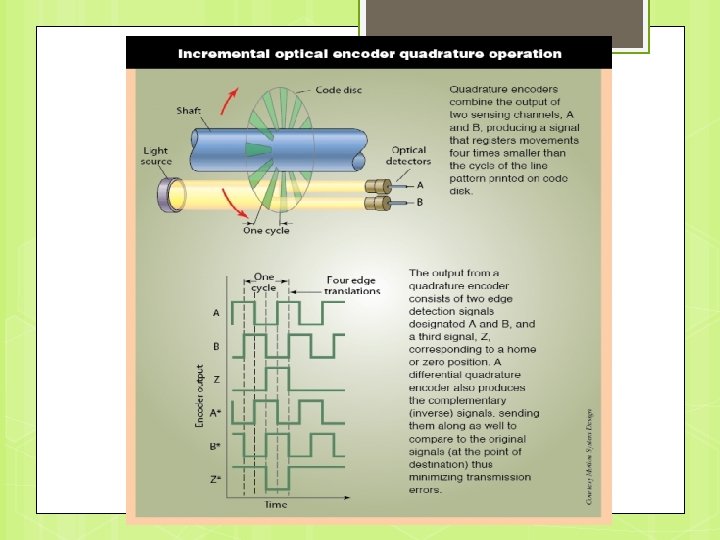
Shaft Encoder Also known as Rotary Encoder is an electro-mechanical device that converts the angular position or motion of a shaft or axle to an analog or digital code. Measure position or speed of the wheels or steering Type: Magnetic or optical encoder Incremental or absolute position Encoder are usually mounted directly on the motor shaft that is before the gear box, so they have the full resolution compared to the much slower rotational speed at the geared-down wheel axle. E. g. 20 tick/revolution encoder use with 1: 100 gear ratio 2000 tick/wheel revolution
Shaft Encoder
Shaft Encoder Example 1: Rotary encoder for angle-measuring devices marked in 3 -bit binary. The inner ring corresponds to Contact 1. Black sectors are “ON". Zero degrees is on the right-hand side, with angle increasing counterclockwise. Step 1: Determine the no. of shaft position by 2 n In this example, 3 –bit binary, so : 23 = 8 positions
Shaft Encoder Step 2: Gray Coding table Sector Contact 1 Contact 2 Contact 3 Angle 0 off off 0° to 45° 1 off ON 45° to 90° 2 off ON ON 90° to 135° 3 off ON off 135° to 180° 4 ON ON off 180° to 225° 5 ON ON ON 225° to 270° 6 ON off ON 270° to 315° 7 ON off 315° to 360°
Shaft Encoder Example 2:
Shaft Encoder Failure
Shaft Encoder Failure
Quiz 1 The inner ring corresponds to Contact 1. Black sectors are “ON". Zero degrees is on the left -hand side, with angle increasing clockwise. Determine: no. of bits no. of positions construct a gray code table Draw the absolute disk track pattern
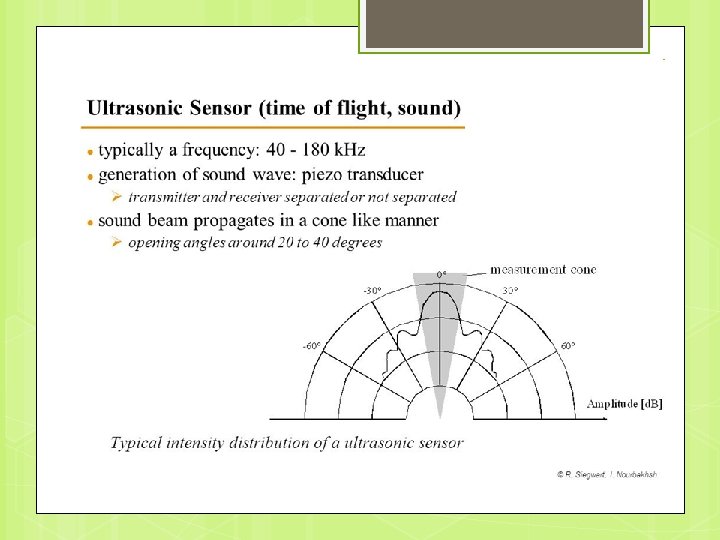
Ultrasonic Sensor A short acoustic signal of about 1 ms at an ultrasonic frequency is emitted and the time is measured from signal emission until the echo returns to the sensor. Measurement are repeated about 20 times per second which gives this sensor its typical clicking sound.
Ultrasonic Sensor Ultrasonic beam angle projection Wide beam Narrow beam
Ultrasonic Sensor
Infrared Use as measure sensor Photon/light reflection (invisible sight) Cheap & fast detection Difference effect on difference surfaces color
Infrared SHARP PSD sensor and sensor diagram source :
Triangulation 1 D laser measuring
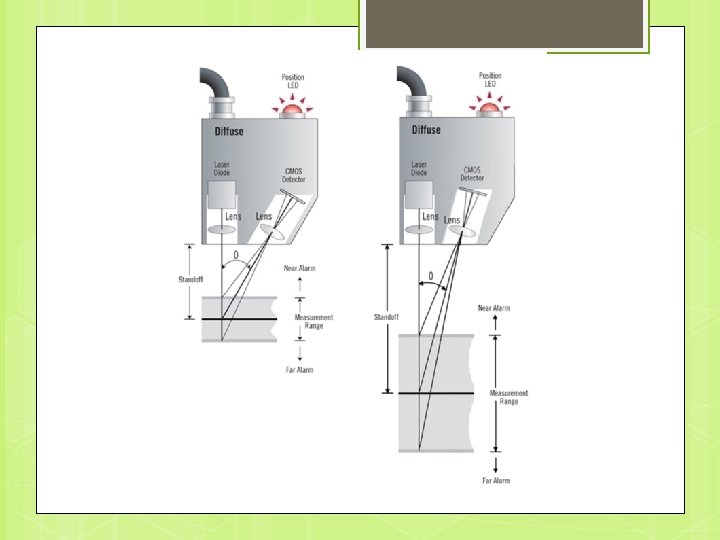
2 D Triangulation A laser beam that has been expanded into a line is diffusely reflected from the surface of the target. This reflected profile is formed on the HSE 3 -CMOS and by detecting changes in the position and shape of the reflection, it is possible to measure the position of various points along the surface of the target.
Camera Convert light into electric charge and process it into electronic signals Image processing CMOS or CCD? Complementary Metal Oxide Silicon (CMOS) Charge coupled device (CCD)
Camera CMOS sensor are very fast , it is 10 ~100 times faster then CCD sensor. (e. g. high ends DSC camera ( Cannon D-30 ) or fast frame camera. ) Actually neither CCD nor CMOS have anything to do with image sensing. The actuarial sensor is a device called "Photo Diode". Both CCD sensor and CMOS sensor used it. Photo Diode convert photon of the light to amount of electron.
Camera Threshold Acquire Image processing Acquire Information Edge Detection Image capture Color Detection Measuring/ Guide
Compass For self localization- to determine its current absolute orientation Improving dead reckoning method Dead Reckoning Method v Dead reckoning is the process of calculating your position relying on a previously determined position v use shaft encoders on each wheel, etc. v starts with a unknown initial position and orientation, then adds all driving and turning actions to find the robot’s current position and orientation.
GPS is used to find the exact location/position for navigation purposed. 3 DR GPS Module for Quad copter
Accelerometer Measuring the acceleration along one axis (multiple axis) Sensor output is either analog or a PWM signal that needs to be measured and translated back into a binary value by the CPU’s timing processing unit Additional low-pass filters for the analog sensor output or digital filtering for the digital sensor output
Accelerometer Common type Sensor Category Key Technologies Capacitive Metal beam or microcontroller feature produces capacitance change in capacitance related to acceleration Piezoelectric crystal mounted to mass – voltage output converted to acceleration Piezoresistive Beam or micro machined feature whose resistance changes with acceleration Hall Effect Motion converted to electrical signal by sensing of changing magnetic field Magnetoresistive Material resistive changes in presence of magnetic field Heat Transfer Location of heated mass tracked during acceleration by sensing temperature
Gyroscope Sense the change in orientation Type: Mechanical gyroscope Optical gyroscope PWM input & output Gyroscope with accelerometer module
THE END