Chapter 11 Part I Response Surface Methodology Six
 &Six DOE Class_90 a")
 + e 反應曲面(Response Surface) =")





 &Six DOE Class_90 a 11")
 &Six DOE Class_90 a 12")

 Example • “ 534. DX 5” &Six DOE Class_90 a")





 • 2 k + nc")

 • 考慮因素: 直交 (Orthogonal) 與 可旋轉性 (Rotatable) • Central")






 &Six DOE Class_90 a 35")
 &Six DOE Class_90 a 36")





 &Six DOE Class_90 a 44")
 &Six DOE Class_90 a 45")
 &Six DOE Class_90 a 46")
 &Six DOE Class_90 a 47")
 &Six DOE Class_90 a 48")
 &Six DOE Class_90 a")

 &Six DOE Class_90 a 53")




- Slides: 61
Chapter 11 Part I : 反應曲面技術 (Response Surface Methodology) &Six DOE Class_90 a
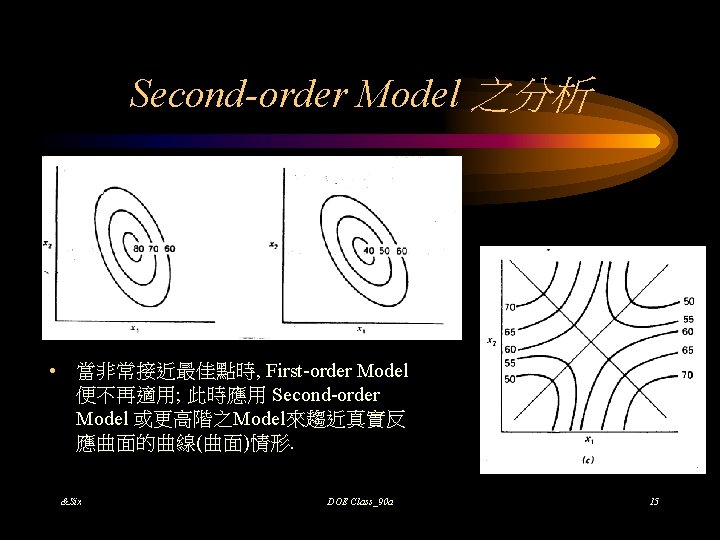
RSM之基本原理 • 真正的函數關係 Y = f(x 1, x 2) + e 反應曲面(Response Surface) = f(x 1, x 2) • 若因子之區間縮小, 則 f(x 1, x 2) 可用多項式來趨近. 如: Y = b 0+b 1 x 1+b 2 x 2+…+bkxk+e (first order) Y = b 0+ bixi+ biix 2 i+ bijxixj+e (second order) &Six DOE Class_90 a 3
反應曲面 - Example &Six DOE Class_90 a 4
Steepest Ascent - 圖解 &Six DOE Class_90 a 6
Steepest Ascent - Example • “ 525. DX 5” • 因子: 1: 反應時間 (35 min. ) 2: 反應溫度 (155 o. F) 反應變數 Y: 平均產出水準 (40%) • Coded Variable (X 1; X 2) = (-1 ~ 1; -1 ~ 1) • Natural Variable ( 1; 2) = (30 ~ 40; 150 ~ 160) &Six DOE Class_90 a 7
Example 525 之實驗數據 • 重複中心點 – Error 之估算 – First-order Model 是否合適 ( Fit? ) &Six DOE Class_90 a 8
Example 之 ANOVA Table &Six DOE Class_90 a 9
Example 之後續實驗結果(一) &Six DOE Class_90 a 11
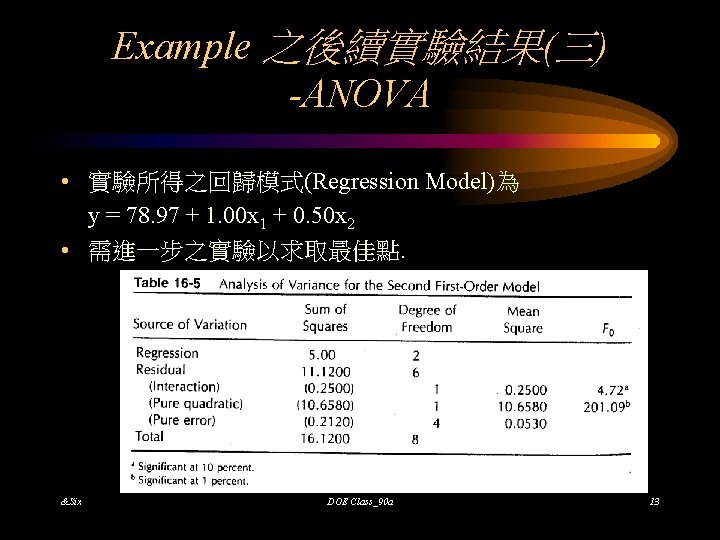
Example 之後續實驗結果(二) &Six DOE Class_90 a 12
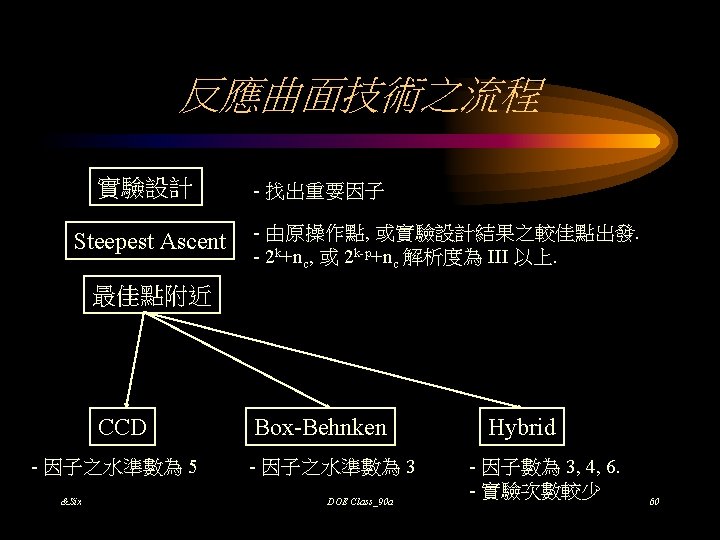
Steepest Ascent 步驟 • 2 k + nc center point 或 CCD 或 其他 • First-order Model 顯著, 且Curvature不顯著; 否 則已在最佳點附近. • 取係數之絕對值最大者; 選定其Step Size xi. • 其他因子之Step Size => xi / bi = xk / bk • 將 xi換算成Natural Variable; 回到第一步驟. &Six DOE Class_90 a 14
Central Composite Design (CCD) Example • “ 534. DX 5” &Six DOE Class_90 a 16
CCD 結構圖 &Six DOE Class_90 a 17
CCD Example 之 ANOVA &Six DOE Class_90 a 18
CCD Example 之反應曲面 &Six DOE Class_90 a 19
CCD Example 之反應曲面_Contour Plot &Six DOE Class_90 a 20
Chapter 11 Part II: 反應曲面技術 - 設計之選擇 - Optimization - EVOP &Six DOE Class_90 a
一階 Model 之 RSM 設計 • 考慮因素: 直交 (Othogonal) • 2 k + nc center point • 2 k-p + nc center point, 但必須為解析度III以上, Why? • Simplex Design – k 個因子, 使用 k+1 次(頂點)實驗 &Six DOE Class_90 a 23
Simplex Design &Six DOE Class_90 a 24
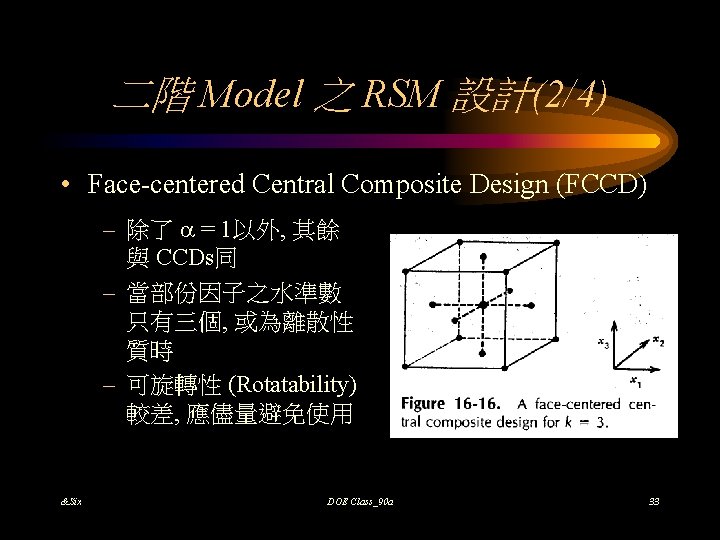
二階 Model 之 RSM 設計(1/4) • 考慮因素: 直交 (Orthogonal) 與 可旋轉性 (Rotatable) • Central Composite Designs (CCDs) – 2 k 或 2 k-1 (解析度V) + 2 k 個軸點 (Axial Points) + nc center point – Factoral Points [2 k或 2 k-1 (解析度V) ]: 估算主作用及兩 因子交互作用 – Axial Points: 估算純粹之二次項 – Center Points: 估算純粹之二次項及 Pure Error &Six DOE Class_90 a 26
Information Surfaces and Contours _22 Design &Six DOE Class_90 a 27
Information Surfaces and Contours _32 Design &Six DOE Class_90 a 28
Information Surfaces and Contours _Second-order Rotatable Design &Six DOE Class_90 a 29
CCD 圖示 &Six DOE Class_90 a 30
常用之 CCDs &Six DOE Class_90 a 31
&Six DOE Class_90 a 32
Box-Behnken Design (k = 3) &Six DOE Class_90 a 35
Box-Behnken Design (k = 4, 5) &Six DOE Class_90 a 36
Hybrid Design 範例 Hybrid 310 &Six Hybrid 311 A DOE Class_90 a 38
Hybrid Design 範例 • Hybrid 416 A, 416 B, 416 C &Six DOE Class_90 a 39
Design Optimality Criteria • D-Optimality and D-Efficiency – Rotatability – Model 中係數估算之準確性 • A-Optimality – Model 中係數之變異程度 • G- and Q-Optimality – 用 Model 來預測實驗區間之準確性 &Six DOE Class_90 a 40
適用之二階 RSM Designs &Six DOE Class_90 a 41
EVOP 之圖示 &Six DOE Class_90 a 43
EVOP Example (1/5) &Six DOE Class_90 a 44
EVOP Example (2/5) &Six DOE Class_90 a 45
EVOP Example (3/5) &Six DOE Class_90 a 46
EVOP Example (4/5) &Six DOE Class_90 a 47
EVOP Example (5/5) &Six DOE Class_90 a 48
Chapter 11 Part III: 混合設計 (Mixture Designs/Experiments) &Six DOE Class_90 a
混合設計之圖示 &Six DOE Class_90 a 52
三重線性座標系統 (Trilinear Coordinate System) &Six DOE Class_90 a 53
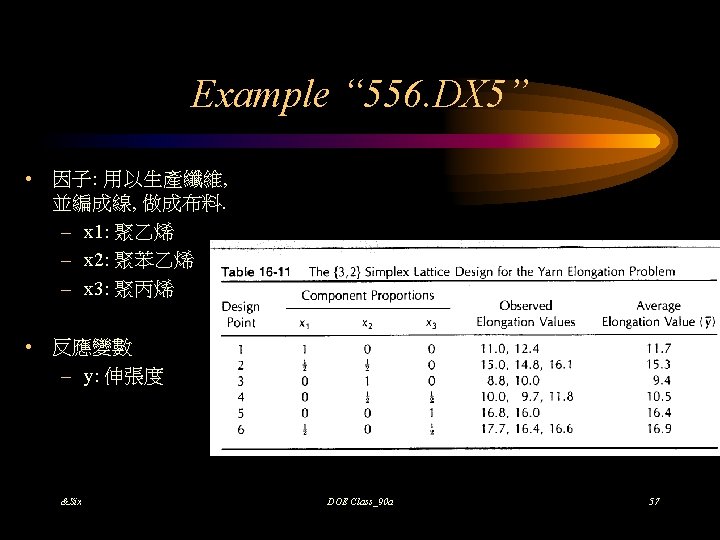
{p, m} Simplex Lattice Design • p 個因子, 每個因子 取m+1 個水準. &Six DOE Class_90 a 54
Simplex Centroid Design • p 個因子取 2 p-1 次實驗 &Six DOE Class_90 a 55
Mixture Models • Linear: Y = bixi • Quadratic: Y = bixi + bijxi xj • Cubic: Y = bixi + bijxi xj + sijxixj(xi - xj) + bijkxi xj xk • Special Cubic: Y = bixi + bijxi xj + bijkxi xj xk &Six DOE Class_90 a 56
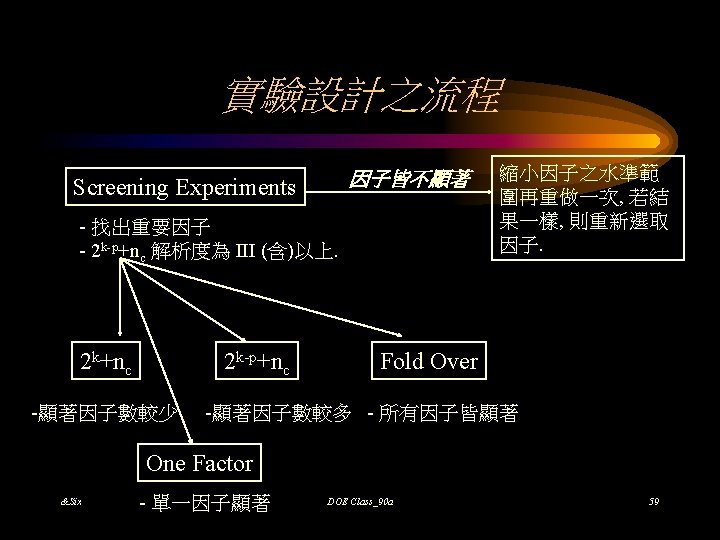
混合設計之流程 Screening Design Simplex Lattice Design 過濾因子 Simplex Centroid Design 實驗次數較多 &Six DOE Class_90 a 61